

4 Final Report - Emits - ESA
4 Final Report - Emits - ESA
4 Final Report - Emits - ESA

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4 <strong>Final</strong><br />
<strong>Report</strong><br />
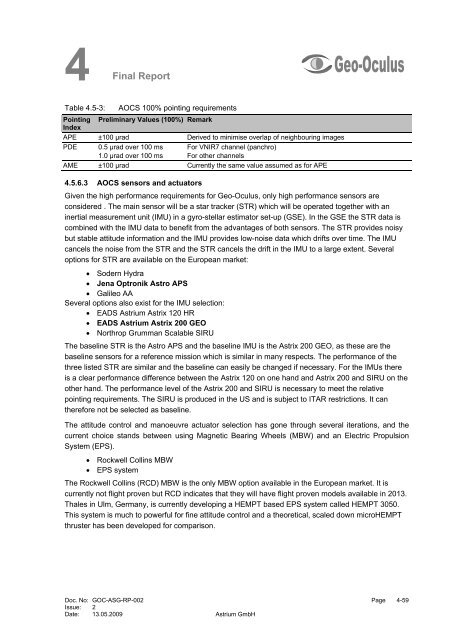
Table 4.5-3: AOCS 100% pointing requirements<br />
Pointing<br />
Index<br />
Preliminary Values (100%) Remark<br />
APE ±100 μrad Derived to minimise overlap of neighbouring images<br />
PDE 0.5 μrad over 100 ms<br />
1.0 μrad over 100 ms<br />
For VNIR7 channel (panchro)<br />
For other channels<br />
AME ±100 μrad Currently the same value assumed as for APE<br />
4.5.6.3 AOCS sensors and actuators<br />
Given the high performance requirements for Geo-Oculus, only high performance sensors are<br />
considered . The main sensor will be a star tracker (STR) which will be operated together with an<br />
inertial measurement unit (IMU) in a gyro-stellar estimator set-up (GSE). In the GSE the STR data is<br />
combined with the IMU data to benefit from the advantages of both sensors. The STR provides noisy<br />
but stable attitude information and the IMU provides low-noise data which drifts over time. The IMU<br />
cancels the noise from the STR and the STR cancels the drift in the IMU to a large extent. Several<br />
options for STR are available on the European market:<br />
• Sodern Hydra<br />
• Jena Optronik Astro APS<br />
• Galileo AA<br />
Several options also exist for the IMU selection:<br />
• EADS Astrium Astrix 120 HR<br />
• EADS Astrium Astrix 200 GEO<br />
• Northrop Grumman Scalable SIRU<br />
The baseline STR is the Astro APS and the baseline IMU is the Astrix 200 GEO, as these are the<br />
baseline sensors for a reference mission which is similar in many respects. The performance of the<br />
three listed STR are similar and the baseline can easily be changed if necessary. For the IMUs there<br />
is a clear performance difference between the Astrix 120 on one hand and Astrix 200 and SIRU on the<br />
other hand. The performance level of the Astrix 200 and SIRU is necessary to meet the relative<br />
pointing requirements. The SIRU is produced in the US and is subject to ITAR restrictions. It can<br />
therefore not be selected as baseline.<br />
The attitude control and manoeuvre actuator selection has gone through several iterations, and the<br />
current choice stands between using Magnetic Bearing Wheels (MBW) and an Electric Propulsion<br />
System (EPS).<br />
• Rockwell Collins MBW<br />
• EPS system<br />
The Rockwell Collins (RCD) MBW is the only MBW option available in the European market. It is<br />
currently not flight proven but RCD indicates that they will have flight proven models available in 2013.<br />
Thales in Ulm, Germany, is currently developing a HEMPT based EPS system called HEMPT 3050.<br />
This system is much to powerful for fine attitude control and a theoretical, scaled down microHEMPT<br />
thruster has been developed for comparison.<br />
Doc. No: GOC-ASG-RP-002 Page 4-59<br />
Issue: 2<br />
Date: 13.05.2009 Astrium GmbH














