

4 Final Report - Emits - ESA
4 Final Report - Emits - ESA
4 Final Report - Emits - ESA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4 <strong>Final</strong><br />
<strong>Report</strong><br />
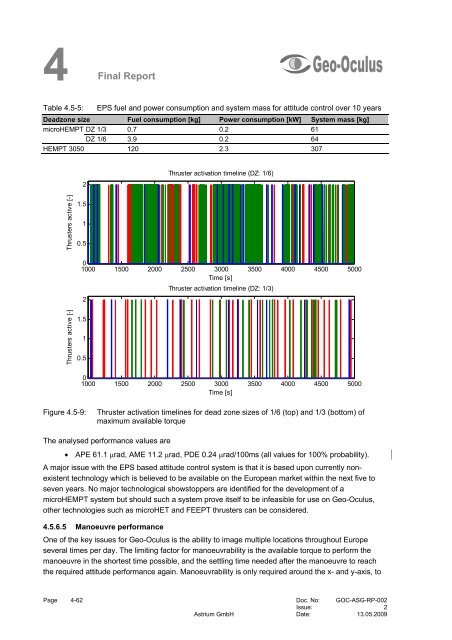
Table 4.5-5: EPS fuel and power consumption and system mass for attitude control over 10 years<br />
Deadzone size Fuel consumption [kg] Power consumption [kW] System mass [kg]<br />
microHEMPT DZ 1/3 0.7 0.2 61<br />
DZ 1/6 3.9 0.2 64<br />
HEMPT 3050 120 2.3 307<br />
Thrusters active [-]<br />
Thrusters active [-]<br />
2<br />
1.5<br />
1<br />
0.5<br />
Thruster activation timeline (DZ: 1/6)<br />
0<br />
1000 1500 2000 2500 3000<br />
Time [s]<br />
3500 4000 4500 5000<br />
Thruster activation timeline (DZ: 1/3)<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
1000 1500 2000 2500 3000<br />
Time [s]<br />
3500 4000 4500 5000<br />
Figure 4.5-9: Thruster activation timelines for dead zone sizes of 1/6 (top) and 1/3 (bottom) of<br />
maximum available torque<br />
The analysed performance values are<br />
• APE 61.1 μrad, AME 11.2 μrad, PDE 0.24 μrad/100ms (all values for 100% probability).<br />
A major issue with the EPS based attitude control system is that it is based upon currently nonexistent<br />
technology which is believed to be available on the European market within the next five to<br />
seven years. No major technological showstoppers are identified for the development of a<br />
microHEMPT system but should such a system prove itself to be infeasible for use on Geo-Oculus,<br />
other technologies such as microHET and FEEPT thrusters can be considered.<br />
4.5.6.5 Manoeuvre performance<br />
One of the key issues for Geo-Oculus is the ability to image multiple locations throughout Europe<br />
several times per day. The limiting factor for manoeuvrability is the available torque to perform the<br />
manoeuvre in the shortest time possible, and the settling time needed after the manoeuvre to reach<br />
the required attitude performance again. Manoeuvrability is only required around the x- and y-axis, to<br />
Page 4-62 Doc. No: GOC-ASG-RP-002<br />
Issue: 2<br />
Astrium GmbH Date: 13.05.2009














