

Precise Orbit Determination of Global Navigation Satellite System of ...
Precise Orbit Determination of Global Navigation Satellite System of ...
Precise Orbit Determination of Global Navigation Satellite System of ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 2 Observations <strong>of</strong> <strong>Orbit</strong> <strong>Determination</strong><br />
CHAPTER 2 OBSERVATIONS OF ORBIT DETERMINATION<br />
The basic observations <strong>of</strong> orbit determination are ranges, range rates (Doppler), carrier-phases, laser ranging, etc.<br />
According to the applications, these observations may be used for one-way or two-way systems. In this chapter,<br />
the basic observations <strong>of</strong> orbit determination, the possible error budgets, the error models related to the receivers<br />
and the advantages and disadvantages based on current satellite navigation systems, GPS/GLONASS are<br />
discussed.<br />
2.1 One-Way <strong>System</strong><br />
In a one-way system the signal transmitted from satellite is received by the ground tracking stations or the signal<br />
transmitted from ground tracking stations is received by satellites. The received signal is then processed for orbit<br />
determination. In a typical one-way system, the measurement is done by comparing a clock time at the<br />
transmitter antenna with a clock time at the receiver antenna. The travel time <strong>of</strong> the signal is scaled into a range<br />
measurement using signal propagation velocity. All microwave observations mentioned above can be used in a<br />
one-way system.<br />
2.1.1 Range<br />
2.1.1.1 Basic Observation<br />
S(t 2 )<br />
S 1<br />
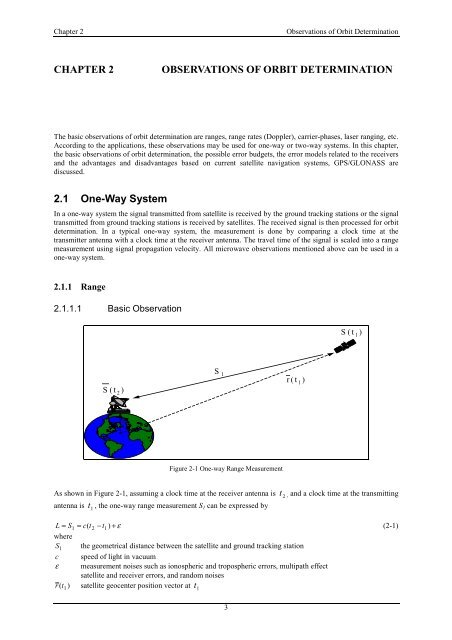
Figure 2-1 One-way Range Measurement<br />
3<br />
r(t 1 )<br />
S(t 1 )<br />
As shown in Figure 2-1, assuming a clock time at the receiver antenna is t 2 , and a clock time at the transmitting<br />
antenna is t1 , the one-way range measurement S1 can be expressed by<br />
L = S1<br />
= c(<br />
t2<br />
− t1)<br />
+ ε<br />
(2-1)<br />
where<br />
S1 the geometrical distance between the satellite and ground tracking station<br />
c speed <strong>of</strong> light in vacuum<br />
ε measurement noises such as ionospheric and tropospheric errors, multipath effect<br />
satellite and receiver errors, and random noises<br />
( t1)<br />
r satellite geocenter position vector at t 1













