

Precise Orbit Determination of Global Navigation Satellite System of ...
Precise Orbit Determination of Global Navigation Satellite System of ...
Precise Orbit Determination of Global Navigation Satellite System of ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 3 <strong>Orbit</strong> Tracking <strong>System</strong> and Their Error Budgets<br />
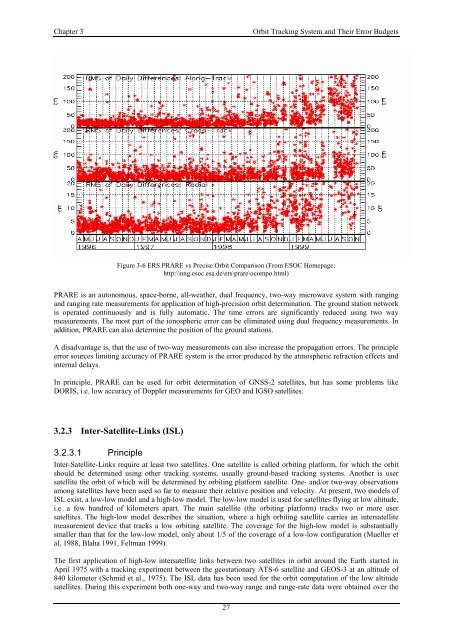
Figure 3-6 ERS PRARE vs <strong>Precise</strong> <strong>Orbit</strong> Comparison (From ESOC Homepage:<br />
http:\\nng.esoc.esa.de\ers\prare\ocompo.html)<br />
PRARE is an autonomous, space-borne, all-weather, dual frequency, two-way microwave system with ranging<br />
and ranging rate measurements for application <strong>of</strong> high-precision orbit determination. The ground station network<br />
is operated continuously and is fully automatic. The time errors are significantly reduced using two way<br />
measurements. The most part <strong>of</strong> the ionospheric error can be eliminated using dual frequency measurements. In<br />
addition, PRARE can also determine the position <strong>of</strong> the ground stations.<br />
A disadvantage is, that the use <strong>of</strong> two-way measurements can also increase the propagation errors. The principle<br />
error sources limiting accuracy <strong>of</strong> PRARE system is the error produced by the atmospheric refraction effects and<br />
internal delays.<br />
In principle, PRARE can be used for orbit determination <strong>of</strong> GNSS-2 satellites, but has some problems like<br />
DORIS, i.e. low accuracy <strong>of</strong> Doppler measurements for GEO and IGSO satellites.<br />
3.2.3 Inter-<strong>Satellite</strong>-Links (ISL)<br />
3.2.3.1 Principle<br />
Inter-<strong>Satellite</strong>-Links require at least two satellites. One satellite is called orbiting platform, for which the orbit<br />
should be determined using other tracking systems, usually ground-based tracking systems. Another is user<br />
satellite the orbit <strong>of</strong> which will be determined by orbiting platform satellite. One- and/or two-way observations<br />
among satellites have been used so far to measure their relative position and velocity. At present, two models <strong>of</strong><br />
ISL exist, a low-low model and a high-low model. The low-low model is used for satellites flying at low altitude,<br />
i.e. a few hundred <strong>of</strong> kilometers apart. The main satellite (the orbiting platform) tracks two or more user<br />
satellites. The high-low model describes the situation, where a high orbiting satellite carries an intersatellite<br />
measurement device that tracks a low orbiting satellite. The coverage for the high-low model is substantially<br />
smaller than that for the low-low model, only about 1/5 <strong>of</strong> the coverage <strong>of</strong> a low-low configuration (Mueller et<br />
al, 1988, Blaha 1991, Feltman 1999).<br />
The first application <strong>of</strong> high-low intersatellite links between two satellites in orbit around the Earth started in<br />
April 1975 with a tracking experiment between the geostationary ATS-6 satellite and GEOS-3 at an altitude <strong>of</strong><br />
840 kilometer (Schmid et al., 1975). The ISL data has been used for the orbit computation <strong>of</strong> the low altitude<br />
satellites. During this experiment both one-way and two-way range and range-rate data were obtained over the<br />
27













