- Page 1 and 2: FIA2 - SISTEMAS NEWTONIANOS Semestr
- Page 3 and 4: Sistemas Newtonianos 2 1.3. Anális
- Page 5 and 6: Sistemas Newtonianos 4 6.1.1. Ejemp
- Page 7 and 8: 12.2.1. La presión colisional . .
- Page 9 and 10: Capítulo 1 Presentación La físic
- Page 11 and 12: Capítulo 3 Guía de Gráficos Los
- Page 13 and 14: Capítulo 4 Material Docente Asocia
- Page 15 and 16: Capítulo 5 Reglamentación 5.1. As
- Page 17 and 18: Sistemas Newtonianos 16 Descripció
- Page 19 and 20: Sistemas Newtonianos 18 Criterio de
- Page 21 and 22: Capítulo 1 Métodos Numéricos 1.1
- Page 23 and 24: funcion = @(variable) definicion Si
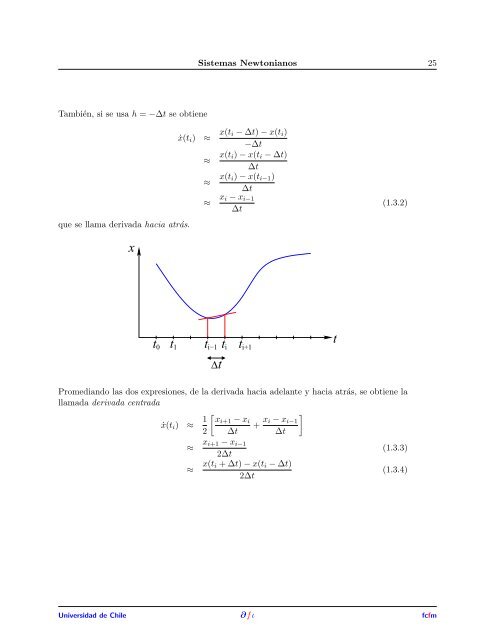
- Page 25: Sistemas Newtonianos 24 Hay que not
- Page 29 and 30: Sistemas Newtonianos 28 Se tienen a
- Page 31 and 32: Sistemas Newtonianos 30 indetermina
- Page 33 and 34: No olvide poner su nombre. Seccion
- Page 35 and 36: Sistemas Newtonianos 34 Use el mét
- Page 37 and 38: 1.C. Ejercicios Sistemas Newtoniano
- Page 39 and 40: Sistemas Newtonianos 38 1. A partir
- Page 41 and 42: Sistemas Newtonianos 40 Figura 2.1:
- Page 43 and 44: Ocurrencia 30 25 20 15 10 5 1400 N
- Page 45 and 46: Sistemas Newtonianos 44 error es si
- Page 47 and 48: Sistemas Newtonianos 46 Esta instru
- Page 49 and 50: Sistemas Newtonianos 48 Figura 2.3:
- Page 51 and 52: Sistemas Newtonianos 50 Experiencia
- Page 53 and 54: E. Análisis e informe Sistemas New
- Page 55 and 56: Sistemas Newtonianos 54 rangos de f
- Page 57 and 58: Sistemas Newtonianos - FI1A2 Ejerci
- Page 59 and 60: Sistemas Newtonianos - FI1A2 Ejerci
- Page 61 and 62: Sistemas Newtonianos 60 iii.- medio
- Page 63 and 64: Sistemas Newtonianos 62 Una propied
- Page 65 and 66: Sistemas Newtonianos 64 El uso de l
- Page 67 and 68: 2. A × B = − B × A; 3. A
- Page 69 and 70: Lectura suplementaria Sistemas Newt
- Page 71 and 72: Sistemas Newtonianos 70 3.5.2. Sign
- Page 73 and 74: FALTAN LOS APENDICES DE LA UNIDAD 3
- Page 75 and 76: Sistemas Newtonianos 74 ii. Ambas f
- Page 77 and 78:
4.3.1. 2da Ley de Newton Sistemas N
- Page 79 and 80:
Sistemas Newtonianos 78 Universidad
- Page 81 and 82:
Sistemas Newtonianos 80 Notar que t
- Page 83 and 84:
Sistemas Newtonianos 82 Graficar lo
- Page 85 and 86:
4.B. Guia Practica Sistemas Newtoni
- Page 87 and 88:
Sistemas Newtonianos 86 Variacin de
- Page 89 and 90:
4.C. Ejercicios Sistemas Newtoniano
- Page 91 and 92:
Sistemas Newtonianos 90 P2. [5 punt
- Page 93 and 94:
Capítulo 5 4B 92
- Page 95 and 96:
Capítulo 6 4C 6.1. Torque y moment
- Page 97 and 98:
Donde se ha definido la aceleració
- Page 99 and 100:
es .3 Sistemas Newtonianos 98 LO =
- Page 101 and 102:
Sistemas Newtonianos 100 El torque
- Page 103 and 104:
Sistemas Newtonianos 102 el cuerpo
- Page 105 and 106:
Sistemas Newtonianos 104 que muestr
- Page 107 and 108:
6.B. Ejercicios Sistemas Newtoniano
- Page 109 and 110:
6.C. Guia de Ejercicios Sistemas Ne
- Page 111 and 112:
Capítulo 7 5A 110
- Page 113 and 114:
Capítulo 8 5B 8.1. Interacción de
- Page 115 and 116:
Sistemas Newtonianos 114 t vx 0 1.0
- Page 117 and 118:
Sistemas Newtonianos 116 con ρ la
- Page 119 and 120:
x [ m ] 1 0.8 0.6 0.4 0.2 0 -0.2 -0
- Page 121 and 122:
FALTAN LOS APENDICES DE LA UNIDAD 5
- Page 123 and 124:
Sistemas Newtonianos 122 k, lo 0 x(
- Page 125 and 126:
posición (m) 0.05 0.04 0.03 0.02 0
- Page 127 and 128:
Sistemas Newtonianos 126 es usando
- Page 129 and 130:
B (m) 0.16 0.14 0.12 0.1 0.08 0.06
- Page 131 and 132:
9.8. Guia Practica Sistemas Newtoni
- Page 133 and 134:
F. Experiencias Sistemas Newtoniano
- Page 135 and 136:
G. Informe Sistemas Newtonianos 134
- Page 137 and 138:
Sistemas Newtonianos 136 que tiende
- Page 139 and 140:
Sistemas Newtonianos 138 Por otro l
- Page 141 and 142:
T Sistemas Newtonianos 140 θ1 x−
- Page 143 and 144:
Sistemas Newtonianos 142 Calculemos
- Page 145 and 146:
u A 0.8A 0.6A 0.4A 0.2A 0 Sistemas
- Page 147 and 148:
10.A. Controles de Lectura Sistemas
- Page 149 and 150:
11.2. Ondas Armonicas Sistemas Newt
- Page 151 and 152:
de borde en x = 0 puede ser de dos
- Page 153 and 154:
Sistemas Newtonianos 152 Figura 11.
- Page 155 and 156:
Sistemas Newtonianos 154 T c = vel
- Page 157 and 158:
Sistemas Newtonianos 156 sen(kL) =
- Page 159 and 160:
Sistemas Newtonianos 158 el 1er, 2d
- Page 161 and 162:
11.C. Guia de Auxiliar Sistemas New
- Page 163 and 164:
Capítulo 12 7A 12.1. Introducción
- Page 165 and 166:
φ v δt cos φ A v δt Sistemas Ne
- Page 167 and 168:
Sistemas Newtonianos 166 h φ φ v
- Page 169 and 170:
Sistemas Newtonianos 168 8. Un chor
- Page 171 and 172:
13.B. Guia Practica Sistemas Newton
- Page 173 and 174:
Sistemas Newtonianos 172 Figura 13.
- Page 175 and 176:
Parte III Evaluaciones Generales 17
- Page 177 and 178:
2. La curva contínua de la figura
- Page 179 and 180:
Sistemas Newtonianos 178 Sistemas N
- Page 181 and 182:
Sistemas Newtonianos 180 (a) La vel
- Page 183 and 184:
Sistemas Newtonianos - FI1A2 Examen