

FIA2 - SISTEMAS NEWTONIANOS Semestre 2007-2 Profesores ...
FIA2 - SISTEMAS NEWTONIANOS Semestre 2007-2 Profesores ...
FIA2 - SISTEMAS NEWTONIANOS Semestre 2007-2 Profesores ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Sistemas Newtonianos 65<br />
Esta ecuación resume el comportamiento del centro de masas de un sistema cualquiera<br />
cuando sobre este actúa una fuerza externa neta F . El sistema necesariamente es rígido,<br />
de modo que sus deformaciones ni fuerzas internas afectan el movimiento de su centro de<br />
masas.<br />
3.4. Producto vectorial y torques<br />
El uso de palancas para levantar cuerpos es un hecho empírico en el cual, mediante una<br />
combinación de fuerza, puntos de apoyo y lugares donde se aplica la fuerza, podemos lavantar<br />
cuerpos que mediante levantamiento directo sería imposible. Este hecho es explicado<br />
mediante las ecuaciones de Newton, para lo cual requeriremos de una nueva construcción<br />
vectorial que llamaremos producto cruz.<br />
3.4.1. El producto cruz<br />
Sean A y B dos vectores, entonces el elemento<br />
es un vector cuya<br />
C = A × B ,<br />
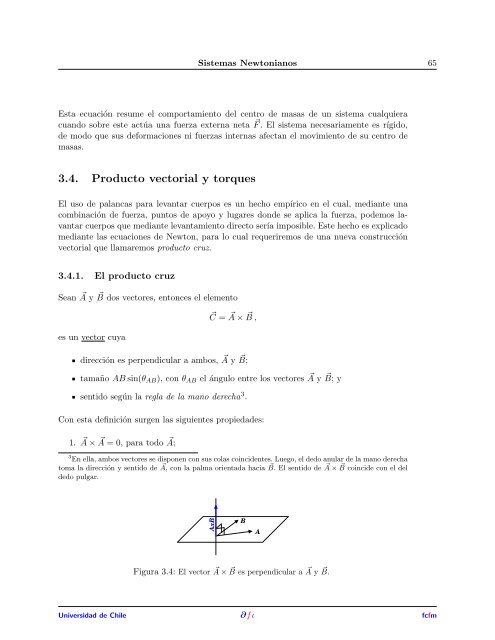
dirección es perpendicular a ambos, A y B;<br />
tamaño AB sin(θAB), con θAB el ángulo entre los vectores A y B; y<br />
sentido según la regla de la mano derecha 3 .<br />
Con esta definición surgen las siguientes propiedades:<br />
1. A × A = 0, para todo A;<br />
3 En ella, ambos vectores se disponen con sus colas coincidentes. Luego, el dedo anular de la mano derecha<br />
toma la dirección y sentido de A, con la palma orientada hacia B. El sentido de A × B coincide con el del<br />
dedo pulgar.<br />
AxB<br />
Figura 3.4: El vector A × B es perpendicular a A y B.<br />
B<br />
Universidad de Chile ∂fι fcfm<br />
A


