2007/1–2 - Széchenyi István Egyetem
2007/1–2 - Széchenyi István Egyetem
2007/1–2 - Széchenyi István Egyetem

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
44<br />
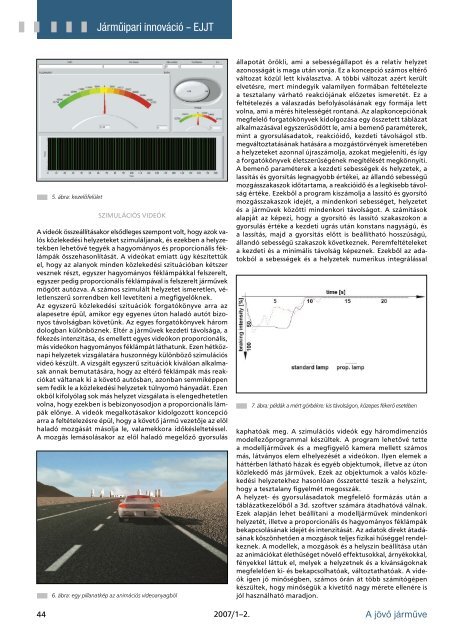
5. ábra: kezelőfelület<br />
Járműipari innováció – EJJT<br />
SZIMULÁCIÓS VIDEÓK<br />
A videók összeállításakor elsődleges szempont volt, hogy azok valós<br />
közlekedési helyzeteket szimuláljanak, és ezekben a helyzetekben<br />
lehetővé tegyék a hagyományos és proporcionális féklámpák<br />
összehasonlítását. A videókat emiatt úgy készítettük<br />
el, hogy az alanyok minden közlekedési szituációban kétszer<br />
vesznek részt, egyszer hagyományos féklámpákkal felszerelt,<br />
egyszer pedig proporcionális féklámpával is felszerelt járművek<br />
mögött autózva. A számos szimulált helyzetet ismeretlen, véletlenszerű<br />
sorrendben kell levetíteni a megfigyelőknek.<br />
Az egyszerű közlekedési szituációk forgatókönyve arra az<br />
alapesetre épül, amikor egy egyenes úton haladó autót bizonyos<br />
távolságban követünk. Az egyes forgatókönyvek három<br />
dologban különböznek. Eltér a járművek kezdeti távolsága, a<br />
fékezés intenzitása, és emellett egyes videókon proporcionális,<br />
más videókon hagyományos féklámpát láthatunk. Ezen hétköznapi<br />
helyzetek vizsgálatára huszonnégy különböző szimulációs<br />
videó készült. A vizsgált egyszerű szituációk kiválóan alkalmasak<br />
annak bemutatására, hogy az eltérő féklámpák más reakciókat<br />
váltanak ki a követő autósban, azonban semmiképpen<br />
sem fedik le a közlekedési helyzetek túlnyomó hányadát. Ezen<br />
okból kifolyólag sok más helyzet vizsgálata is elengedhetetlen<br />
volna, hogy ezekben is bebizonyosodjon a proporcionális lámpák<br />
előnye. A videók megalkotásakor kidolgozott koncepció<br />
arra a feltételezésre épül, hogy a követő jármű vezetője az elöl<br />
haladó mozgását másolja le, valamekkora időkésleltetéssel.<br />
A mozgás lemásolásakor az elöl haladó megelőző gyorsulás<br />
6. ábra: egy pillanatkép az animációs videoanyagból<br />
állapotát örökli, ami a sebességállapot és a relatív helyzet<br />
azonosságát is maga után vonja. Ez a koncepció számos eltérő<br />
változat közül lett kiválasztva. A többi változat azért került<br />
elvetésre, mert mindegyik valamilyen formában feltételezte<br />
a tesztalany várható reakciójának előzetes ismeretét. Ez a<br />
feltételezés a válaszadás befolyásolásának egy formája lett<br />
volna, ami a mérés hitelességét rontaná. Az alapkoncepciónak<br />
megfelelő forgatókönyvek kidolgozása egy összetett táblázat<br />
alkalmazásával egyszerűsödött le, ami a bemenő paraméterek,<br />
mint a gyorsulásadatok, reakcióidő, kezdeti távolságol stb.<br />
megváltoztatásának hatására a mozgástörvények ismeretében<br />
a helyzeteket azonnal újraszámolja, azokat megjeleníti, és így<br />
a forgatókönyvek életszerűségének megítélését megkönnyíti.<br />
A bemenő paraméterek a kezdeti sebességek és helyzetek, a<br />
lassítás és gyorsítás legnagyobb értékei, az állandó sebességű<br />
mozgásszakaszok időtartama, a reakcióidő és a legkisebb távolság<br />
értéke. Ezekből a program kiszámolja a lassító és gyorsító<br />
mozgásszakaszok idejét, a mindenkori sebességet, helyzetet<br />
és a járművek közötti mindenkori távolságot. A számítások<br />
alapját az képezi, hogy a gyorsító és lassító szakaszokon a<br />
gyorsulás értéke a kezdeti ugrás után konstans nagyságú, és<br />
a lassítás, majd a gyorsítás előtt is beállítható hosszúságú,<br />
állandó sebességű szakaszok következnek. Peremfeltételeket<br />
a kezdeti és a minimális távolság képeznek. Ezekből az adatokból<br />
a sebességek és a helyzetek numerikus integrálással<br />
7. ábra: példák a mért görbékre: kis távolságon, közepes fékerő esetében<br />
kaphatóak meg. A szimulációs videók egy háromdimenziós<br />
modellezőprogrammal készültek. A program lehetővé tette<br />
a modelljárművek és a megfigyelő kamera mellett számos<br />
más, látványos elem elhelyezését a videókon. Ilyen elemek a<br />
háttérben látható házak és egyéb objektumok, illetve az úton<br />
közlekedő más járművek. Ezek az objektumok a valós közlekedési<br />
helyzetekhez hasonlóan összetetté teszik a helyszínt,<br />
hogy a tesztalany figyelmét megosszák.<br />
A helyzet- és gyorsulásadatok megfelelő formázás után a<br />
táblázatkezelőből a 3d. szoftver számára átadhatóvá válnak.<br />
Ezek alapján lehet beállítani a modelljárművek mindenkori<br />
helyzetét, illetve a proporcionális és hagyományos féklámpák<br />
bekapcsolásának idejét és intenzitását. Az adatok direkt átadásának<br />
köszönhetően a mozgások teljes fizikai hűséggel rendelkeznek.<br />
A modellek, a mozgások és a helyszín beállítása után<br />
az animációkat élethűséget növelő effektusokkal, árnyékokkal,<br />
fényekkel láttuk el, melyek a helyzetnek és a kívánságoknak<br />
megfelelően ki- és bekapcsolhatóak, változtathatóak. A videók<br />
igen jó minőségben, számos órán át több számítógépen<br />
készültek, hogy minőségük a kivetítő nagy mérete ellenére is<br />
jól használható maradjon.<br />
<strong>2007</strong>/<strong>1–2</strong>. A jövő járműve