00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
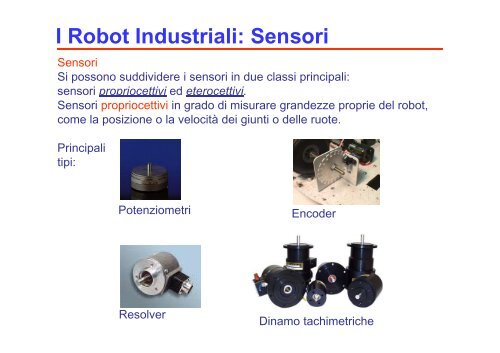
I Robot Industriali: SensoriSensoriSi possono suddividere i sensori in due classi principali:sensori propriocettivi p ed eterocettivi.Sensori propriocettivi in grado di misurare grandezze proprie del robot,come la posizione o la velocità dei giunti o delle ruote.Principalitipi:PotenziometriEncoderResolverDinamo tachimetriche