00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
SHOW LESS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
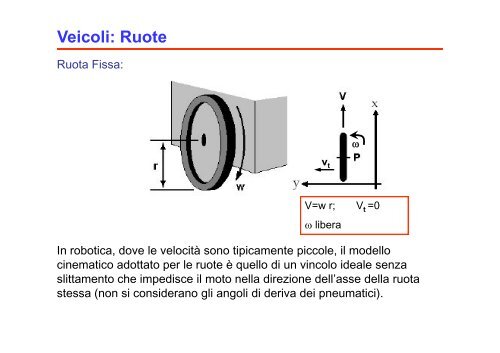
Veicoli: RuoteRuota Fissa:ωv tV=w r; V t =0ω liberaIn robotica, dove le velocità sono tipicamente piccole, il modellocinematico adottato per le ruote è quello di un vincolo ideale senzaslittamento che impedisce il moto nella direzione dell’asse <strong>della</strong> ruotastessa (non si considerano gli angoli di deriva dei pneumatici).