00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
00 - RobIntro.pdf - Ingegneria Meccanica, Nucleare e della ...
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
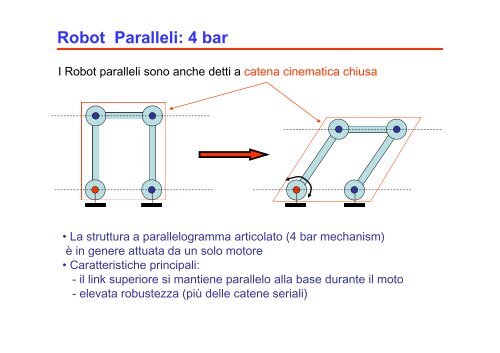
Robot Paralleli: 4 barI Robot paralleli sono anche detti a catena cinematica chiusa• La struttura a parallelogramma articolato (4 bar mechanism)è in genere attuata da un solo motore• Caratteristiche principali:- il link superiore si mantiene parallelo alla base durante il moto- elevata robustezza (più delle catene seriali)