Technieken voor de observatie en analyse van verkeersconflicten
Technieken voor de observatie en analyse van verkeersconflicten
Technieken voor de observatie en analyse van verkeersconflicten

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.1.4 TA<br />
De time-to-acci<strong>de</strong>nt (TA) gaat uit <strong>van</strong> het mom<strong>en</strong>t dat e<strong>en</strong> ontwijkingsmanoeuvre wordt<br />
gestart tot het mom<strong>en</strong>t dat <strong>de</strong> botsing had plaatsgevon<strong>de</strong>n, indi<strong>en</strong> <strong>de</strong> koers <strong>en</strong> snelheid<br />
ongewijzigd war<strong>en</strong>. De TA wordt berek<strong>en</strong>d op basis <strong>van</strong> <strong>de</strong> snelheid <strong>en</strong> <strong>de</strong> afstand op het<br />
mom<strong>en</strong>t <strong>van</strong> <strong>de</strong> ontwijkingsactie (Lötter, 2001):<br />
TA = (d/v) (met v in m/s <strong>en</strong> d in meters)<br />
TA = (d/v) x 3.6 (met v in km/h <strong>en</strong> d in meters).<br />
De TA-waar<strong>de</strong> kan ook wor<strong>de</strong>n opgezocht in e<strong>en</strong> tabel (zie bijlage). In <strong>de</strong>ze tabel wordt<br />
ook direct aangegev<strong>en</strong> of <strong>de</strong> waar<strong>de</strong> bij e<strong>en</strong> ernstig conflict hoort. Het on<strong>de</strong>rscheid<br />
tuss<strong>en</strong> ernstige <strong>en</strong> niet-ernstige conflict<strong>en</strong> is gebaseerd op <strong>de</strong> optimale remtijd (OTB) <strong>en</strong><br />
wordt ver<strong>de</strong>r toegelicht in paragraaf 3.1.7.<br />
3.1.5 PET<br />
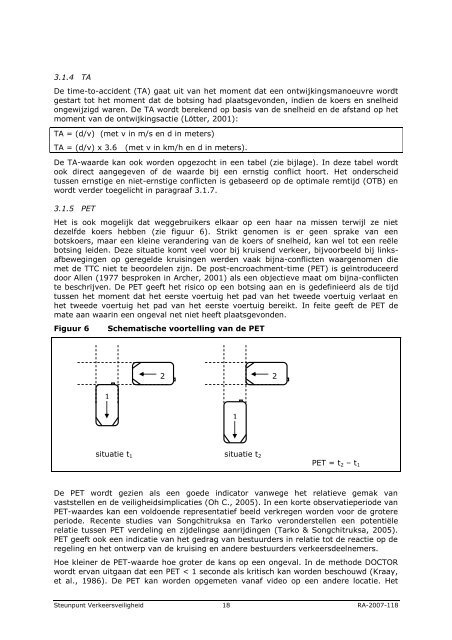
Het is ook mogelijk dat weggebruikers elkaar op e<strong>en</strong> haar na miss<strong>en</strong> terwijl ze niet<br />
<strong>de</strong>zelf<strong>de</strong> koers hebb<strong>en</strong> (zie figuur 6). Strikt g<strong>en</strong>om<strong>en</strong> is er ge<strong>en</strong> sprake <strong>van</strong> e<strong>en</strong><br />
botskoers, maar e<strong>en</strong> kleine veran<strong>de</strong>ring <strong>van</strong> <strong>de</strong> koers of snelheid, kan wel tot e<strong>en</strong> reële<br />
botsing lei<strong>de</strong>n. Deze situatie komt veel <strong>voor</strong> bij kruis<strong>en</strong>d verkeer, bij<strong>voor</strong>beeld bij linksafbeweging<strong>en</strong><br />
op geregel<strong>de</strong> kruising<strong>en</strong> wer<strong>de</strong>n vaak bijna-conflict<strong>en</strong> waarg<strong>en</strong>om<strong>en</strong> die<br />
met <strong>de</strong> TTC niet te beoor<strong>de</strong>l<strong>en</strong> zijn. De post-<strong>en</strong>croachm<strong>en</strong>t-time (PET) is geïntroduceerd<br />
door All<strong>en</strong> (1977 besprok<strong>en</strong> in Archer, 2001) als e<strong>en</strong> objectieve maat om bijna-conflict<strong>en</strong><br />
te beschrijv<strong>en</strong>. De PET geeft het risico op e<strong>en</strong> botsing aan <strong>en</strong> is ge<strong>de</strong>finieerd als <strong>de</strong> tijd<br />
tuss<strong>en</strong> het mom<strong>en</strong>t dat het eerste voertuig het pad <strong>van</strong> het twee<strong>de</strong> voertuig verlaat <strong>en</strong><br />
het twee<strong>de</strong> voertuig het pad <strong>van</strong> het eerste voertuig bereikt. In feite geeft <strong>de</strong> PET <strong>de</strong><br />
mate aan waarin e<strong>en</strong> ongeval net niet heeft plaatsgevon<strong>de</strong>n.<br />
Figuur 6<br />
Schematische <strong>voor</strong>telling <strong>van</strong> <strong>de</strong> PET<br />
1<br />
2 2<br />
1<br />
situatie t 1 situatie t 2<br />
PET = t 2 – t 1<br />
De PET wordt gezi<strong>en</strong> als e<strong>en</strong> goe<strong>de</strong> indicator <strong>van</strong>wege het relatieve gemak <strong>van</strong><br />
vaststell<strong>en</strong> <strong>en</strong> <strong>de</strong> veiligheidsimplicaties (Oh C., 2005). In e<strong>en</strong> korte <strong>observatie</strong>perio<strong>de</strong> <strong>van</strong><br />
PET-waar<strong>de</strong>s kan e<strong>en</strong> voldo<strong>en</strong><strong>de</strong> repres<strong>en</strong>tatief beeld verkreg<strong>en</strong> wor<strong>de</strong>n <strong>voor</strong> <strong>de</strong> grotere<br />
perio<strong>de</strong>. Rec<strong>en</strong>te studies <strong>van</strong> Songchitruksa <strong>en</strong> Tarko veron<strong>de</strong>rstell<strong>en</strong> e<strong>en</strong> pot<strong>en</strong>tiële<br />
relatie tuss<strong>en</strong> PET ver<strong>de</strong>ling <strong>en</strong> zij<strong>de</strong>lingse aanrijding<strong>en</strong> (Tarko & Songchitruksa, 2005).<br />
PET geeft ook e<strong>en</strong> indicatie <strong>van</strong> het gedrag <strong>van</strong> bestuur<strong>de</strong>rs in relatie tot <strong>de</strong> reactie op <strong>de</strong><br />
regeling <strong>en</strong> het ontwerp <strong>van</strong> <strong>de</strong> kruising <strong>en</strong> an<strong>de</strong>re bestuur<strong>de</strong>rs verkeers<strong>de</strong>elnemers.<br />
Hoe kleiner <strong>de</strong> PET-waar<strong>de</strong> hoe groter <strong>de</strong> kans op e<strong>en</strong> ongeval. In <strong>de</strong> metho<strong>de</strong> DOCTOR<br />
wordt er<strong>van</strong> uitgaan dat e<strong>en</strong> PET < 1 secon<strong>de</strong> als kritisch kan wor<strong>de</strong>n beschouwd (Kraay,<br />
et al., 1986). De PET kan wor<strong>de</strong>n opgemet<strong>en</strong> <strong>van</strong>af vi<strong>de</strong>o op e<strong>en</strong> an<strong>de</strong>re locatie. Het<br />
Steunpunt Verkeersveiligheid 18 RA-2007-118