MASTEROPPGAVE 2011 - buildingSMART
MASTEROPPGAVE 2011 - buildingSMART
MASTEROPPGAVE 2011 - buildingSMART

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3) SYSTEMER FOR PROSJEKTSTYRING<br />
3.1) CRITICAL PATH METHOD<br />
Kritisk-linje-metoden (Engelsk: “Critical Path Method” (CPM)) er en type nettverksalgoritme for planlegging av<br />
aktiviteter. Metoden ble utviklet av selskapene DuPont og Remington Rand sent på 1950-tallet, og har siden<br />
fått utstrakt bruk i bygge- og prosessindustrien (9). CPM går ut på å samle milepæler i et nettverk forbundet av<br />
oppgaver nødvendige for å nå disse milepælene. Slik kartlegges hvilke oppgaver som er avhengige av hverandre<br />
og man kan navigere i prosessen fra begynnelse til slutt via oppgaver og milepæler. Den linjen gjennom<br />
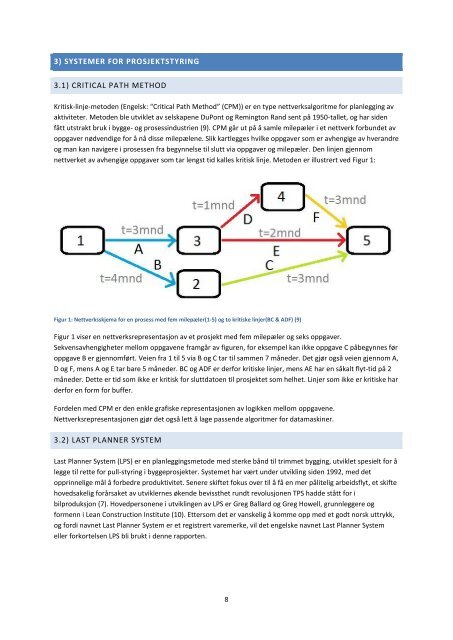
nettverket av avhengige oppgaver som tar lengst tid kalles kritisk linje. Metoden er illustrert ved Figur 1:<br />
Figur 1: Nettverksskjema for en prosess med fem milepæler(1-5) og to kritiske linjer(BC & ADF) (9)<br />
Figur 1 viser en nettverksrepresentasjon av et prosjekt med fem milepæler og seks oppgaver.<br />
Sekvensavhengigheter mellom oppgavene framgår av figuren, for eksempel kan ikke oppgave C påbegynnes før<br />
oppgave B er gjennomført. Veien fra 1 til 5 via B og C tar til sammen 7 måneder. Det gjør også veien gjennom A,<br />
D og F, mens A og E tar bare 5 måneder. BC og ADF er derfor kritiske linjer, mens AE har en såkalt flyt-tid på 2<br />
måneder. Dette er tid som ikke er kritisk for sluttdatoen til prosjektet som helhet. Linjer som ikke er kritiske har<br />
derfor en form for buffer.<br />
Fordelen med CPM er den enkle grafiske representasjonen av logikken mellom oppgavene.<br />
Nettverksrepresentasjonen gjør det også lett å lage passende algoritmer for datamaskiner.<br />
3.2) LAST PLANNER SYSTEM<br />
Last Planner System (LPS) er en planleggingsmetode med sterke bånd til trimmet bygging, utviklet spesielt for å<br />
legge til rette for pull-styring i byggeprosjekter. Systemet har vært under utvikling siden 1992, med det<br />
opprinnelige mål å forbedre produktivitet. Senere skiftet fokus over til å få en mer pålitelig arbeidsflyt, et skifte<br />
hovedsakelig forårsaket av utviklernes økende bevissthet rundt revolusjonen TPS hadde stått for i<br />
bilproduksjon (7). Hovedpersonene i utviklingen av LPS er Greg Ballard og Greg Howell, grunnleggere og<br />
formenn i Lean Construction Institute (10). Ettersom det er vanskelig å komme opp med et godt norsk uttrykk,<br />
og fordi navnet Last Planner System er et registrert varemerke, vil det engelske navnet Last Planner System<br />
eller forkortelsen LPS bli brukt i denne rapporten.<br />
8