controle de um robô movel utilizando a tecnologia zigbee e a visão ...
controle de um robô movel utilizando a tecnologia zigbee e a visão ...
controle de um robô movel utilizando a tecnologia zigbee e a visão ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
35<br />
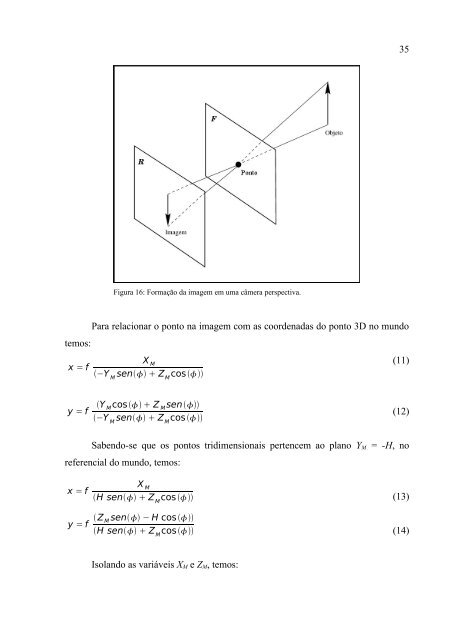
Figura 16: Formação da imagem em <strong>um</strong>a câmera perspectiva.<br />
temos:<br />
x = f<br />
Para relacionar o ponto na imagem com as coor<strong>de</strong>nadas do ponto 3D no mundo<br />
X M<br />
−Y M<br />
sen Z M<br />
cos <br />
(11)<br />
y = f<br />
Y M<br />
cos Z M<br />
sen<br />
−Y M<br />
sen Z M<br />
cos <br />
(12)<br />
Sabendo-se que os pontos tridimensionais pertencem ao plano Y M = -H, no<br />
referencial do mundo, temos:<br />
x = f<br />
X M<br />
H sen Z M<br />
cos <br />
(13)<br />
y = f Z M<br />
sen − H cos <br />
H sen Z M<br />
cos <br />
(14)<br />
Isolando as variáveis X M e Z M , temos: