FA-1L/3H instrukcja
FA-1L/3H instrukcja
FA-1L/3H instrukcja

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
automatyka domowa i przemysłowa<br />
3. W sterowaniu grupowym o załączeniu oraz prędkości napędu decyduje falownik nadrzędny (Master).<br />
Możliwe jest natomiast oprogramowanie falowników podrzędnych w taki sposób aby można było je zatrzymad<br />
za pomocy lokalnych wejśd sterowniczych lub klawiatury.<br />
Konfiguracja<br />
W poniższych tabelach przedstawione jest zestawienie parametrów które należy ustawid na falownikach aby<br />
skonfigurowad sterowanie grupowe.<br />
Falownik nadrzędny (Master)<br />
Parametr Opis Wartośd<br />
A28 Identyfikator falownika w sieciach komunikacyjnych 128<br />
Falownik podrzędny (Slave)<br />
Parametr Opis Wartośd<br />
F01 Prędkośd zadawana ze sterownika Master<br />
F02 Główne źródło zadawania częstotliwości 0<br />
F05 Źródło zadawania sygnału START-STOP 4<br />
W trybie sterowania grupowego możliwe jest zatrzymanie napędu podporządkowanego z poziomu przycisków<br />
na panelu falownika. Ale jego kolejne uruchomienie możliwe jest dopiero po odebraniu kolejnego rozkazu<br />
START z nadrzędnego falownika<br />
A28 Identyfikator falownika w sieciach komunikacyjnych 1 - 127<br />
A29 Prędkośd transmisji<br />
Jak w falowniku Master<br />
A30 Format ramki komunikacyjnej<br />
Jak w falowniku Master<br />
A55 Współczynnik skalowania prędkości w sterowaniu grupowym 0.10 – 10.00<br />
Parametr A55 określa relację pomiędzy prędkością falownika Master i Slave, zgodnie z zależnością:<br />
F01 = A55 * Częstotliwośd falownika Master.<br />
Uwaga: Wypadkowa częstotliwośd falownika Slave może się różnid od częstotliwości zadanej z falownika Master<br />
(np. w przypadku gdy w falowniku Slave skonfigurowane jest pomocnicze źródło zadawania częstotliwości i<br />
określona relacja pomiędzy głównym i pomocniczym źródłem zadawania częstotliwości (parametry F02, F03, F-<br />
04)<br />
Przykład<br />
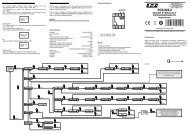
W poniższym przykładzie przedstawiona jest przykładowa konfiguracja grupy falowników o następującej funkcjonalności:<br />
1. Falownik nadrzędny (Master) wykorzystuje potencjometr (podłączony do wejścia AI1) do sterowania<br />
prędkością oraz wejścia cyfrowe do sterowania kierunkiem ruchu.<br />
2. Falowniki podrzędne mają ustawione pomocnicze źródło zadawania częstotliwości w postaci potencjometru<br />
podłączonego do wejścia AI1, oraz dodatkowo zaimplementowaną funkcję motopotencjometru (prędkośd<br />
Góra i prędkośd Dół).<br />
3. Falowniki podrzędne (Slave) odbierają z falownika Master informację o zadanej częstotliwości i zapisują ją<br />
w parametrze F01(współczynnik skalowania prędkości 1.00).<br />
4. Wypadkowa prędkośd falowników podrzędnych będzie wynikiem złożenia trzech elementów:<br />
a. Prędkości zadanej zdalnie i zapisanej w parametrze F01<br />
b. Prędkości ustawionej na potencjometrze podłączonym do wejścia AI1<br />
Falownik wektorowy <strong>FA</strong>-<strong>1L</strong>…/<strong>FA</strong>-<strong>3H</strong>… – Instrukcja obsługi v. 1.0.2 103