FA-1L/3H instrukcja
FA-1L/3H instrukcja
FA-1L/3H instrukcja

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
automatyka domowa i przemysłowa<br />
Asynchroniczny wektor przestrzenny PWM 0<br />
Bezkrokowy synchroniczny wektor przestrzenny<br />
PWM<br />
- 0 N<br />
Tryb generowania fali<br />
1<br />
F19<br />
napięcia wyjściowego<br />
Dwufazowo zoptymalizowany wektor przestrzenny<br />
PWM<br />
2<br />
F20<br />
Rozpędzanie według<br />
0.0 –<br />
Etap przyspieszania<br />
krzywej S<br />
50.0<br />
% 0.0 T<br />
F21<br />
Rozpędzanie według<br />
0.0 –<br />
Etap hamowania<br />
krzywej S<br />
50.0<br />
% 0.0 T<br />
F22<br />
Zwalnianie według<br />
0.0 –<br />
Etap przyspieszania<br />
krzywej S<br />
50.0<br />
% 0.0 T<br />
F23<br />
Zwalnianie według<br />
0.0 –<br />
Etap hamowania<br />
krzywej S<br />
50.0<br />
% 0.0 T<br />
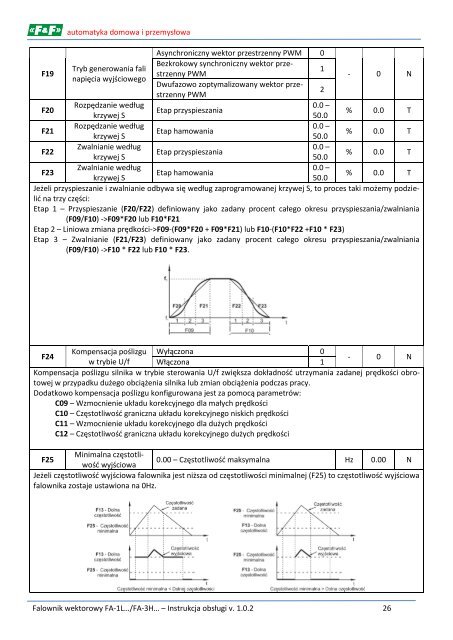
Jeżeli przyspieszanie i zwalnianie odbywa się według zaprogramowanej krzywej S, to proces taki możemy podzielid<br />
na trzy części:<br />
Etap 1 – Przyspieszanie (F20/F22) definiowany jako zadany procent całego okresu przyspieszania/zwalniania<br />
(F09/F10) ->F09*F20 lub F10*F21<br />
Etap 2 – Liniowa zmiana prędkości->F09-(F09*F20 + F09*F21) lub F10-(F10*F22 +F10 * F23)<br />
Etap 3 – Zwalnianie (F21/F23) definiowany jako zadany procent całego okresu przyspieszania/zwalniania<br />
(F09/F10) ->F10 * F22 lub F10 * F23.<br />
Kompensacja poślizgu Wyłączona 0<br />
F24<br />
- 0 N<br />
w trybie U/f Włączona 1<br />
Kompensacja poślizgu silnika w trybie sterowania U/f zwiększa dokładnośd utrzymania zadanej prędkości obrotowej<br />
w przypadku dużego obciążenia silnika lub zmian obciążenia podczas pracy.<br />
Dodatkowo kompensacja poślizgu konfigurowana jest za pomocą parametrów:<br />
C09 – Wzmocnienie układu korekcyjnego dla małych prędkości<br />
C10 – Częstotliwośd graniczna układu korekcyjnego niskich prędkości<br />
C11 – Wzmocnienie układu korekcyjnego dla dużych prędkości<br />
C12 – Częstotliwośd graniczna układu korekcyjnego dużych prędkości<br />
Minimalna częstotliwośd<br />
wyjściowa<br />
F25<br />
0.00 – Częstotliwośd maksymalna Hz 0.00 N<br />
Jeżeli częstotliwośd wyjściowa falownika jest niższa od częstotliwości minimalnej (F25) to częstotliwośd wyjściowa<br />
falownika zostaje ustawiona na 0Hz.<br />
Falownik wektorowy <strong>FA</strong>-<strong>1L</strong>…/<strong>FA</strong>-<strong>3H</strong>… – Instrukcja obsługi v. 1.0.2 26