Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes
Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes
Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Κεφάλαιο 3: Μοντελοποίηση της κάμερας<br />
στο γραμμικό μοντέλο που ήδη αναλύσαμε.<br />
Σημαντική διευκρίνιση είναι ότι στο σχήμα που απεικονίζεται το pinhole model, το είδωλο<br />
κάθε αντικειμένου, δημιουργείται στο επίπεδο της εικόνας, ανεστραμμένο. Είναι προφανές όμως,<br />
ότι η φωτογραφία που προκύπτει από μία κάμερα, δεν έχει ανεστραμμένο το είδωλο. Αυτό<br />
σημαίνει ότι εσωτερικά της κάμερας γίνεται μια δεύτερη αντιστροφή, η οποία έχει ως αποτέλεσμα<br />
να παίρνουμε την εικόνα, όπως τη βλέπουμε στο φυσικό κόσμο. Ισοδύναμα λοιπόν, μπορούμε να<br />
υποθέσουμε ότι το επίπεδο της εικόνας βρίσκεται μπροστά και όχι πίσω από την εστία της κάμερας<br />
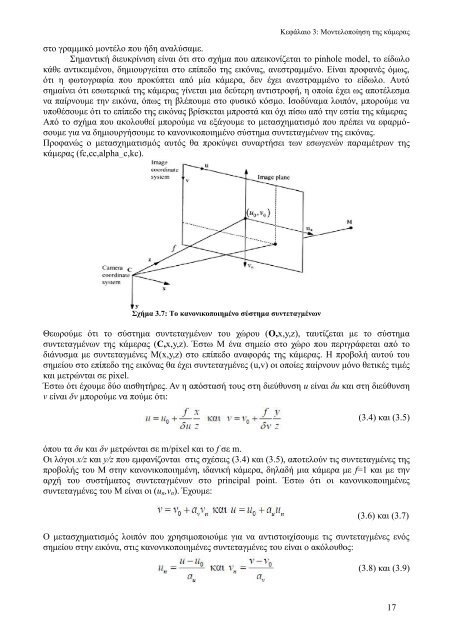
Aπό το σχήμα που ακολουθεί μπορούμε να εξάγουμε το μετασχηματισμό που πρέπει να εφαρμόσουμε<br />
για να δημιουργήσουμε το κανονικοποιημένο σύστημα συντεταγμένων της εικόνας.<br />
Προφανώς ο μετασχηματισμός αυτός θα προκύψει συναρτήσει των εσωγενών παραμέτρων της<br />
κάμερας (fc,cc,alpha_c,kc).<br />
Σχήμα 3.7: Το κανονικοποιημένο σύστημα συντεταγμένων<br />
Θεωρούμε ότι το σύστημα συντεταγμένων του χώρου ( Ο,x,y,z), ταυτίζεται με το σύστημα<br />
συντεταγμένων της κάμερας ( C,x,y,z). Έστω M ένα σημείο στο χώρο που περιγράφεται από το<br />
διάνυσμα με συντεταγμένες Μ(x,y,z) στο επίπεδο αναφοράς της κάμερας. Η προβολή αυτού του<br />
σημείου στο επίπεδο της εικόνας θα έχει συντεταγμένες (u,v) οι οποίες παίρνουν μόνο θετικές τιμές<br />
και μετρώνται σε pixel.<br />
Έστω ότι έχουμε δύο αισθητήρες. Αν η απόστασή τους στη διεύθυνση u είναι δu και στη διεύθυνση<br />
v είναι δv μπορούμε να πούμε ότι:<br />
(3.4) και (3.5)<br />
όπου τα δu και δv μετρώνται σε m/pixel και το f σε m.<br />
Οι λόγοι x/z και y/z που εμφανίζονται στις σχέσεις (3.4) και (3.5), αποτελούν τις συντεταγμένες της<br />
προβολής του Μ στην κανονικοποιημένη, ιδανική κάμερα, δηλαδή μια κάμερα με f=1 και με την<br />
αρχή του συστήματος συντεταγμένων στο principal point. Έστω ότι οι κανονικοποιημένες<br />
συντεταγμένες του Μ είναι οι (u n ,v n ). Έχουμε:<br />
(3.6) και (3.7)<br />
Ο μετασχηματισμός λοιπόν που χρησιμοποιούμε για να αντιστοιχίσουμε τις συντεταγμένες ενός<br />
σημείου στην εικόνα, στις κανονικοποιημένες συντεταγμένες του είναι ο ακόλουθος:<br />
(3.8) και (3.9)<br />
17