Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes
Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes
Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Κεφάλαιο 4: Βαθμονόμηση της κάμερας<br />
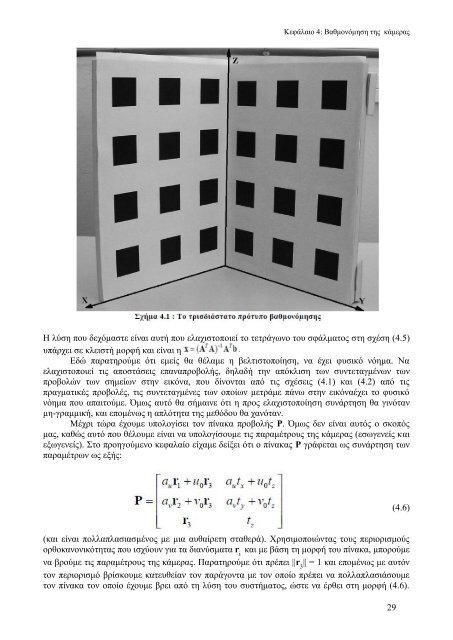
Η λύση που δεχόμαστε είναι αυτή που ελαχιστοποιεί το τετράγωνο του σφάλματος στη σχέση (4.5)<br />
υπάρχει σε κλειστή μορφή και είναι η<br />
Εδώ παρατηρούμε ότι εμείς θα θέλαμε η βελτιστοποίηση, να έχει φυσικό νόημα. Να<br />
ελαχιστοποιεί τις αποστάσεις επαναπροβολής, δηλαδή την απόκλιση των συντεταγμένων των<br />
προβολών των σημείων στην εικόνα, που δίνονται από τις σχέσεις (4.1) και (4.2) από τις<br />
πραγματικές προβολές, τις συντεταγμένες των οποίων μετράμε πάνω στην εικόναέχει το φυσικό<br />
νόημα που απαιτούμε. Όμως αυτό θα σήμαινε ότι η προς ελαχιστοποίηση συνάρτηση θα γινόταν<br />
μη-γραμμική, και επομένως η απλότητα της μεθόδου θα χανόταν.<br />
Μέχρι τώρα έχουμε υπολογίσει τον πίνακα προβολής Ρ. Όμως δεν είναι αυτός ο σκοπός<br />
μας, καθώς αυτό που θέλουμε είναι να υπολογίσουμε τις παραμέτρους της κάμερας (εσωγενείς και<br />
εξωγενείς). Στο προηγούμενο κεφαλαίο είχαμε δείξει ότι ο πίνακας Ρ γράφεται ως συνάρτηση των<br />
παραμέτρων ως εξής:<br />
(4.6)<br />
(και είναι πολλαπλασιασμένος με μια αυθαίρετη σταθερά). Χρησιμοποιώντας τους περιορισμούς<br />
ορθοκανονικότητας που ισχύουν για τα διανύσματα r i<br />
και με βάση τη μορφή του πίνακα, μπορούμε<br />
να βρούμε τις παραμέτρους της κάμερας. Παρατηρούμε ότι πρέπει ||r 3<br />
|| = 1 και επομένως με αυτόν<br />
τον περιορισμό βρίσκουμε κατευθείαν τον παράγοντα με τον οποίο πρέπει να πολλαπλασιάσουμε<br />
τον πίνακα τον οποίο έχουμε βρει από τη λύση του συστήματος, ώστε να έρθει στη μορφή (4.6).<br />
29