Vertrauensmarketing
Vertrauensmarketing
Vertrauensmarketing

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
421<br />
TECHNIK<br />
1 | EINLEITUNG<br />
Dieser Beitrag zeigt eine Prototyplösung auf, mit der Videoaufnahmen<br />
aus Mini- oder Mikrodrohnen in Echtzeit oder offline<br />
in einen virtuellen Globus integriert werden können. Dabei<br />
wurde der Fokus speziell auf die Verwendung von kostengünstigen<br />
und rasch verfügbaren Mini- und Mikrodrohnensystemen<br />
gelegt. Gerade auf Plattformsystemen dieser Kategorie<br />
können wegen Gewichtslimitierungen und aus Kostengründen<br />
zur Fluglagebestimmung nur Sensorsysteme geringer Qualität<br />
verwendet werden. Diese Einschränkungen limitieren die Georegistrierungsgenauigkeit,<br />
mit welcher die Videodaten in die<br />
virtuelle Welt integriert werden können. Die Prototyp-Entwicklung<br />
erfolgte im Rahmen des KTI-Projekts »Virtual Monitoring«<br />
[1] am Institut Vermessung und Geoinformation der Fachhochschule<br />
Nordwestschweiz. Der in diesem Beitrag präsentierte<br />
Ansatz unterscheidet sich in mehrfacher Hinsicht von<br />
mini- und mikrodrohnenbasierten photogrammetrischen Anwendungen<br />
wie sie u. a. in [2] vorgestellt werden. So liegt der<br />
Fokus bei der hier vorgestellten Lösung im Speziellen bei der<br />
Echtzeit-Georegistrierung und -Geodatenintegration von Bilddaten<br />
in virtuelle Globen. Für die Echtzeit-Georegistrierung<br />
werden die standardmäßig verfügbaren Geosensoren auf den<br />
unbemannten Plattformen sowie die bestehende Geodatenbasis<br />
des virtuellen Globus verwendet. Vertiefende Informationen<br />
über die realisierte Lösung sind in der Veröffentlichung<br />
[3] zu finden.<br />
2 | VERWENDETE BASISTECHNOLOGIEN<br />
Heute existiert eine große Anzahl verschiedener unbemannter<br />
Flugsysteme für unterschiedliche Anwendungen und in unterschiedlichen<br />
Ausführungen auf dem Markt. Gerade Mini- und<br />
Mikrodrohnen werden zunehmend als kostengünstige und effiziente<br />
Aufnahmeplattformen für Geodaten eingesetzt. Die<br />
europäische Assoziation für unbemannte Flugsysteme (EU-<br />
ROUVS) klassiert diese Kleinstflugsysteme wie folgt:<br />
Kategorie Maximales<br />
Startgewicht<br />
Mikro<br />
Mini<br />
< 5 kg<br />
< 30 kg<br />
Diese Fluggeräte verfügen meist über einen integrierten Fluglagekontroller,<br />
der eine automatische Stabilisierung sowie eine<br />
ferngesteuerte Navigation erlaubt. Einige Plattformen verfügen<br />
zusätzlich über einen Autopiloten, der vollständig auto-<br />
3<br />
Maximale<br />
Flughöhe<br />
250 m<br />
150–300 m<br />
Flugdauer Datenlink-<br />
Reichweite<br />
1 h<br />
< 2 h<br />
Tabelle 1 | Klassifikation Mini- und Mikrodrohnensysteme<br />
< 10 km<br />
< 10 km<br />
nome Flüge ermöglicht. Die für die Fluglagedatenbestimmung<br />
notwendigen Sensordaten werden meist mittels MEMS- (Micro-Electro-Mechanical<br />
System) basiertem Inertialnavigationssystem<br />
(INS), Navigations-GPS-Empfänger, Magnetkompass<br />
und Barometer erfasst. Dabei werden die Fluglagedaten bestehend<br />
aus Position, Ausrichtung und Geschwindigkeit aus den<br />
einzelnen Sensoren vom Fluglagekontroller durch Sensordatenfusions-Algorithmen<br />
optimal geschätzt. Die Prototyplösung<br />
verwendet das Mikrodrohnensystem »microdrones md4-200«<br />
(vgl. Abb. 1) mit den folgenden Merkmalen:<br />
Fluggerät Quadcopter<br />
Max. Abfluggewicht<br />
Max. Zuladung<br />
Flugdauer<br />
Genauigkeit Fluglagedaten<br />
Lage<br />
Höhe<br />
Nick- und Rollwinkel<br />
Gierwinkel<br />
0,9 kg<br />
0,3 kg (für Bildsensoren)<br />
~20 min<br />
3,5 m CEP<br />
5 m SEP<br />
1–2°<br />
3–5°<br />
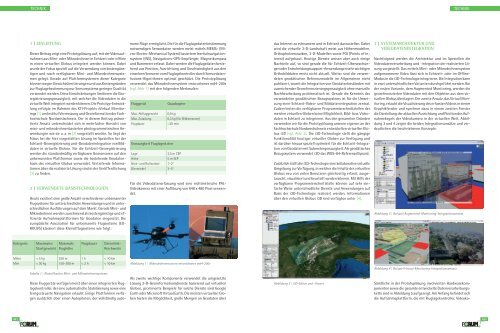
Für die Videodatenerfassung wird eine nichtmetrische PAL-<br />
Videokamera mit einer Auflösung von 640 x 480 Pixel verwendet.<br />
Abbildung 1 | Mikrodrohnensystem »microdrones md4-200«<br />
Als zweite wichtige Komponente verwendet die umgesetzte<br />
Lösung 3-D-Geoinformationsdienste basierend auf virtuellen<br />
Globen, prominente Beispiele für solche Dienste sind Google<br />
Earth oder Microsoft Virtual Earth. Die meisten virtuellen Globen<br />
bieten die Möglichkeit, große Mengen an Geodaten über<br />
das Internet zu »streamen« und in Echtzeit darzustellen. Dabei<br />
wird die virtuelle 3-D-Landschaft meist aus Höhenmodellen,<br />
Orthophotomosaiken, 3-D-Modellen sowie POI (Points of Interest)<br />
aufgebaut. Heutige Dienste weisen aber auch einige<br />
Nachteile auf, so sind gerade die für Echtzeit-Überwachungen<br />
oder Entscheidungssupport-Anwendungen sehr wichtigen<br />
Orthobilddaten meist nicht aktuell. Weiter sind die verwendeten<br />
geodätischen Referenzmodelle im Allgemeinen nicht<br />
publiziert, womit die Integration von Geodatenbeständen mit<br />
ausreichender Georeferenzierungsgenauigkeit ohne manuelle<br />
Nachbearbeitung problematisch ist. Gerade die Kenntnis des<br />
verwendeten geodätischen Bezugssystems ist für die Umsetzung<br />
einer Echtzeit-Video- und Bilddatenintegration zentral.<br />
Zudem bieten die verfügbaren Programmierschnittstellen der<br />
meisten virtuellen Globen keine Möglichkeit, Bild- bzw. Videodaten<br />
in Echtzeit zu integrieren. Aus den genannten Gründen<br />
verwenden wir für die Prototyplösung unseren eigenen an der<br />
Fachhochschule Nordwestschweiz entwickelten virtuellen Globus<br />
i3D (vgl. Abb. 2). Die i3D-Technologie stellt die gängige<br />
Funktionalität heutiger virtueller Globen zur Verfügung und<br />
ist darüber hinaus speziell optimiert für die Echtzeit-Integration<br />
von Geodaten mit Submetergenauigkeit. Als geodätisches<br />
Bezugssystem verwendet i3D das WGS-84-Referenzellipsoid.<br />
Zusätzlich stellt die i3D-Technologie eine kollaborative virtuelle<br />
Umgebung zur Verfügung, in welcher die Inhalte des virtuellen<br />
Globus neu von vielen Benutzern gleichzeitig erfasst, ausgetauscht,<br />
visualisiert und beurteilt werden können. Mit Hilfe der<br />
verfügbaren Programmierschnittstelle können auf sehr einfache<br />
Weise unterschiedliche Dienste und Anwendungen auf<br />
Basis der i3D-Technologie realisiert werden. Informationen<br />
über den virtuellen Globus i3D sind verfügbar unter [4].<br />
Abbildung 2 | i3D-Editor und -Viewer<br />
3 | SYSTEMARCHITEKTUR UND<br />
VIDEODATENINTEGRATION<br />
TECHNIK<br />
Nachfolgend werden die Architektur und im Speziellen die<br />
Videodatenverarbeitung und -integration der realisierten Lösung<br />
vorgestellt. Das mittels Mini- oder Mikrodrohnensystem<br />
aufgenommene Video lässt sich in Echtzeit- oder im Offline-<br />
Modus in die i3D-Technologie integrieren. Die Integration kann<br />
in zwei unterschiedlichen Varianten durchgeführt werden. Bei<br />
der ersten Variante, dem Augmented Monitoring, werden die<br />
georeferenzierten Videodaten mit den Objekten aus dem virtuellen<br />
Globus überlagert. Der zweite Ansatz, das Virtual Monitoring,<br />
erlaubt die Visualisierung des erfassten Videos in einem<br />
Graphikfenster und synchron dazu in einem zweiten Fenster<br />
die Darstellung der aktuellen Ausrichtung und Position des Aufnahmekegels<br />
der Videokamera in der virtuellen Welt. Abbildung<br />
3 und 4 zeigen die beiden Integrationsansätze und verdeutlichen<br />
die beschriebenen Konzepte.<br />
Abbildung 3 | Beispiel Augmented-Monitoring-Integrationsansatz<br />
Abbildung 4 | Beispiel Virtual-Monitoring-Integrationsansatz<br />
Sämtliche in der Prototyplösung involvierten Hardwarekomponenten<br />
sowie die gesamte entwickelte Datenverarbeitungskette<br />
sind in Abbildung 5 aufgezeigt. Am Anfang befindet sich<br />
die Aufnahmeplattform, die mit Fluglagekontroller, Videoka-<br />
3<br />
422