

KUKA Positionierer - KUKA Robotics
KUKA Positionierer - KUKA Robotics
KUKA Positionierer - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
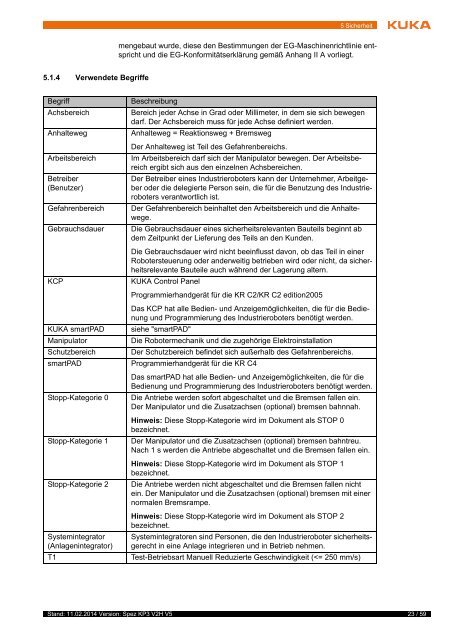
5 Sicherheitmengebaut wurde, diese den Bestimmungen der EG-Maschinenrichtlinie entsprichtund die EG-Konformitätserklärung gemäß Anhang II A vorliegt.5.1.4 Verwendete BegriffeBegriffAchsbereichAnhaltewegArbeitsbereichBetreiber(Benutzer)GefahrenbereichGebrauchsdauerKCP<strong>KUKA</strong> smartPADManipulatorSchutzbereichsmartPADStopp-Kategorie 0Stopp-Kategorie 1Stopp-Kategorie 2Systemintegrator(Anlagenintegrator)T1BeschreibungBereich jeder Achse in Grad oder Millimeter, in dem sie sich bewegendarf. Der Achsbereich muss für jede Achse definiert werden.Anhalteweg = Reaktionsweg + BremswegDer Anhalteweg ist Teil des Gefahrenbereichs.Im Arbeitsbereich darf sich der Manipulator bewegen. Der Arbeitsbereichergibt sich aus den einzelnen Achsbereichen.Der Betreiber eines Industrieroboters kann der Unternehmer, Arbeitgeberoder die delegierte Person sein, die für die Benutzung des Industrierobotersverantwortlich ist.Der Gefahrenbereich beinhaltet den Arbeitsbereich und die Anhaltewege.Die Gebrauchsdauer eines sicherheitsrelevanten Bauteils beginnt abdem Zeitpunkt der Lieferung des Teils an den Kunden.Die Gebrauchsdauer wird nicht beeinflusst davon, ob das Teil in einerRobotersteuerung oder anderweitig betrieben wird oder nicht, da sicherheitsrelevanteBauteile auch während der Lagerung altern.<strong>KUKA</strong> Control PanelProgrammierhandgerät für die KR C2/KR C2 edition2005Das KCP hat alle Bedien- und Anzeigemöglichkeiten, die für die Bedienungund Programmierung des Industrieroboters benötigt werden.siehe "smartPAD"Die Robotermechanik und die zugehörige ElektroinstallationDer Schutzbereich befindet sich außerhalb des Gefahrenbereichs.Programmierhandgerät für die KR C4Das smartPAD hat alle Bedien- und Anzeigemöglichkeiten, die für dieBedienung und Programmierung des Industrieroboters benötigt werden.Die Antriebe werden sofort abgeschaltet und die Bremsen fallen ein.Der Manipulator und die Zusatzachsen (optional) bremsen bahnnah.Hinweis: Diese Stopp-Kategorie wird im Dokument als STOP 0bezeichnet.Der Manipulator und die Zusatzachsen (optional) bremsen bahntreu.Nach 1 s werden die Antriebe abgeschaltet und die Bremsen fallen ein.Hinweis: Diese Stopp-Kategorie wird im Dokument als STOP 1bezeichnet.Die Antriebe werden nicht abgeschaltet und die Bremsen fallen nichtein. Der Manipulator und die Zusatzachsen (optional) bremsen mit einernormalen Bremsrampe.Hinweis: Diese Stopp-Kategorie wird im Dokument als STOP 2bezeichnet.Systemintegratoren sind Personen, die den Industrieroboter sicherheitsgerechtin eine Anlage integrieren und in Betrieb nehmen.Test-Betriebsart Manuell Reduzierte Geschwindigkeit (














