VERMESSUNGSKUNDE IV
VERMESSUNGSKUNDE IV
VERMESSUNGSKUNDE IV

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>VERMESSUNGSKUNDE</strong> <strong>IV</strong><br />
Vorlesung für das 4. Semester<br />
Wilfried Korth<br />
Stand: 2. April 2005<br />
HINWEIS:<br />
Das nachfolgende Skript soll die Vorlesung unterstützen. Es<br />
ist nicht auszuschließen, dass sich noch Fehler eingeschlichen<br />
haben. Ich bin für Hinweise zu solchen Fehlern aber auch für<br />
andere Anmerkungen und Verbesserungsvorschläge dankbar.<br />
Ausschlaggebend für die Klausur am Semesterende ist nicht<br />
dieses Skript, sondern der in der Vorlesung vermittelte Stoff!
INHALTSVERZEICHNIS 2<br />
Inhaltsverzeichnis<br />
1 Grundlagen der Tachymetrie 3<br />
1.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3<br />
1.2 Instrumente zur tachymetrischen Geländeaufnahme . . . . . . . . . . . . . . . . . . . 4<br />
1.2.1 Messtischtachymetrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4<br />
1.2.2 Zahlentachymetrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4<br />
1.3 Höhenlinien und Geländedarstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
1.4 Genauigkeit der Geländeaufnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
2 Klassische Tachymeteraufnahme 10<br />
2.1 Tachymeterzüge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10<br />
2.2 Geländeaufnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12<br />
2.3 Auswertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13<br />
2.4 Messtischaufnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
2.5 Bussolentachymetrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
3 Moderne Tachymeteraufnahme 18<br />
3.1 Planung, Vorbereitung und Punktverdichtung . . . . . . . . . . . . . . . . . . . . . . 19<br />
3.2 Aufnahme und Registrierung mit elektronischen Messsystemen . . . . . . . . . . . . . 20<br />
3.3 Automatischer Datenfluss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23<br />
3.4 Graphisch-interaktive Bearbeitung im Innendienst . . . . . . . . . . . . . . . . . . . . 25<br />
3.5 Graphisch-interaktive Bearbeitung im Feld . . . . . . . . . . . . . . . . . . . . . . . . 27<br />
3.6 Einsatz RTK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27<br />
4 Digitale Geländemodelle (DGM) 29<br />
4.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29<br />
4.2 Digitales Höhenmodell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30<br />
4.3 Digitales Landschaftsmodell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30<br />
5 Trigonometrische Höhenmessung 31<br />
5.1 Grundlagen/Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31<br />
5.2 Trigonometrisches Nivellement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33<br />
5.3 Trigonometrische Höhenübertragung über große Distanzen . . . . . . . . . . . . . . . 34<br />
5.3.1 Höhenunterschiede aus einseitig beobachteten Zenitdistanzen . . . . . . . . . . 35<br />
5.3.2 Höhenunterschiede aus gegenseitig beobachteten Zenitdistanzen . . . . . . . . 35<br />
5.3.3 Fehlerbetrachtung zur Höhenübertragung über große Distanzen . . . . . . . . 35<br />
5.4 Bestimmung der Refraktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
1 GRUNDLAGEN DER TACHYMETRIE 3<br />
1 Grundlagen der Tachymetrie<br />
1.1 Allgemeines<br />
In der Tachymetrie werden<br />
- Winkel,<br />
- Strecken und<br />
-Höhen<br />
gleichzeitig für eine dreidimensionale Geländeaufnahme gemessen.<br />
Je nach Art der örtlichen Erfassung und Aufbereitung der Daten unterscheidet man<br />
zwischen<br />
a) Messtisch- und<br />
b) Zahlentachymetrie.<br />
Bei der Messtischtachymetrie kommen<br />
- Messtisch und Kippregel sowie<br />
- Kartiertische<br />
zum Einsatz.<br />
Bei der Zahlentachymetrie wird die ganze Instrumentenvielfalt im Vermessungswesen wie<br />
- Messroboter,<br />
- elektronische Tachymeter,<br />
- Tachymetertheodolite,<br />
- Nivelliertachymeter,<br />
- Reduktionstachymeter,<br />
- Tachymeterbussolen und<br />
- Basis-Tachymeter<br />
genutzt.<br />
Hierbei unterscheiden sich die eingesetzten Instrumente und Verfahren hauptsächlich in<br />
der zu erreichenden Genauigkeit und den Rationalisierungsmöglichkeiten wie automatischen<br />
Datenfluss und automatisierte Messtätigkeit.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
1 GRUNDLAGEN DER TACHYMETRIE 4<br />
1.2 Instrumente zur tachymetrischen Geländeaufnahme<br />
1.2.1 Messtischtachymetrie<br />
• Der Messtisch ist das älteste der noch heute gebräuchlichen Aufnahmeinstrumente<br />
=⇒ Es erfolgt die Kartierung vor Ort<br />
• Messtischplatte, die mit dem Zeichnungsträger bespannt ist, muss im Koordinatensystem<br />
orientiert sein<br />
• Standpunkt koordinatenmäßig bestimmen<br />
• Messtischplatte mit Hilfe einer Orientierbussole nach Norden ausgerichten<br />
• Messtischplatte durch Libellen zu horizontieren<br />
Damit sind die Grundlagen vorhanden, um durch Messung der Richtungen und der<br />
Strecke Punkte auf der Messtischplatte kartieren zu können.<br />
Zum Messen und Kartieren dient die Kippregel. Sie<br />
- dient zum Einstellen und Anreißen der Horizontalrichtungen<br />
-trägt Gerät einen Distanzmesser und eine Einrichtung zum Ablesen der Vertikalwinkel<br />
Bei den Kippregeln unterscheidet man nach Instrumenten mit analoger und digitaler<br />
Messwertausgabe.<br />
• Kippregeln mit analoger Messwertausgabe verfügen über einen optischen Distanzmesser<br />
mit Distanzfäden oder Diagrammkurven. Das Fernrohr erlaubt Ablesungen<br />
in beiden Lagen, weist einen optisch ablesbaren Vertikalkreis auf und ist mit einer<br />
Nivellierlibelle versehen.<br />
• Bei den Kippregeln mit digitaler Messwertausgabe werden die Werte für die Distanzen<br />
und die Vertikalwinkel auf elektronischem Wege gewonnen. Hierbei werden<br />
häufig automatische Lotsensoren eingesetzt, so dass die horizontale Strecke und<br />
der Höhenunterschied im eingebauten Rechner direkt ermittelt werden können.<br />
1.2.2 Zahlentachymetrie<br />
• Bei der Zahlentachymetrie werden von einem bekannten Aufnahmestandpunkt die<br />
Horizontal-, die Vertikalrichtung und die schräge Entfernung bestimmt.<br />
• Lässt sich der Horizontalteilkreis orientieren, können aus dem Beobachtungsmaterial<br />
die Koordinatendifferenzen und der Höhenunterschied bestimmt werden.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
1 GRUNDLAGEN DER TACHYMETRIE 5<br />
Elektronische Tachymeter mit der Bestimmung der Horizontal-, der Vertikalwinkel und<br />
der Schrägstrecke werden hier als bekannt vorausgesetzt.<br />
• Messroboter weisen zusätzlich eine automatische Zielverfolgung auf. Dies wird<br />
durch einen motorischen Antrieb für die Bewegung des Fernrohrs und eine Mustererkennung<br />
für das Prisma erreicht.<br />
• Der klassische Tachymetertheodolit besteht aus einem Theodolit mittlerer oder<br />
niederer Genauigkeit und einem Reichenbachschen Distanzmesser. Die Formel zur<br />
Bestimmung der Entfernung aus den Reichenbachschen Distanzfäden ist vom geometrischen<br />
Nivellement bekannt zu<br />
E = c + k(o − u) (1)<br />
wobei c und k geräteabhängige Konstanten und o die obere und u die untere<br />
Ablesung an den Distanzfäden bedeutet.<br />
• Für einfache Genauigkeiten ist es ausreichend die Größen c und k über den gesamten<br />
Fokussierbereich als konstant anzunehmen. Meistens wird das Gerät so<br />
eingestellt, dass c sich in der Nähe von Null und k bei 100 bzw. 200 befindet.<br />
• Bei höheren Genauigkeiten ist zu berücksichtigen, dass die Größe k von der Fokussierung<br />
also von der Entfernung abhängig ist. In diesem Fall kann der entfernungsabhängige<br />
Anteil in k zusätzlich nach folgender Formel berücksichtigt werden.<br />
E = c +(k + dk)(o − u) (2)<br />
• Die Bestimmung von dk kann über bekannte Strecken mit unterschiedlichen<br />
Streckenlängen erfolgen und kann somit für weitere Messungen genutzt werden.<br />
Die bisherigen Ausführungen beziehen sich auf die Horizontale, also auf den Spezialfall<br />
eines Nivelliertachymeters.<br />
Beim Einsatz eines Theodoliten müssen die Berechnungen der Entfernungen auf schräge<br />
Sichten umgesetzt werden.<br />
Ansätze :<br />
E ′ = c +<br />
E ′′<br />
o − u<br />
= sin(z − α<br />
2 )<br />
sin α<br />
E ′<br />
E<br />
α<br />
α<br />
(o − u) · sin(z + ) · sin(z − 2 2 )<br />
′′ = sin(z + α<br />
2 )<br />
mit α =2· arctan(<br />
sin z<br />
1<br />
2k )<br />
�<br />
(o − u) · cos2 ( α<br />
2 ) − cos2 z �<br />
(3)<br />
sin α · sin z<br />
sin α · sin z<br />
= c +<br />
E ′ ≈ c + k(o − u) · sin z (4)<br />
E = E ′ · sin z ≈ c · sin z + k(o − u) · sin 2 z (5)<br />
h = E ′ · cos z ≈ c · cos z + k(o − u) · cos z sin z (6)<br />
• Die Berechnung der horizontalen Strecke und des Höhenunterschieds kann mit<br />
einfachen Rechenhilfsmitteln erfolgen. Eine direkte optisch-mechanische Berücksichtigung<br />
der Schräge erfolgt bei den sog. Reduktionstachymetern.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
1 GRUNDLAGEN DER TACHYMETRIE 6<br />
z<br />
�<br />
Abbildung 1: Tachymetrische Messung mit Distanzstrichen<br />
Zusätzlich können zur Orientierung Bussolen eingesetzt werden:<br />
E<br />
• Eine Bussole ist ein mit einer Visiereinrichtung versehener Kompass.<br />
Die Visiereinrichtung weist gewöhnlich in die Richtung des Durchmessers, der den<br />
Nullpunkt der Teilung enthält.<br />
• Der Kreis ist meistens linksläufig geteilt. In diesem Fall lässt sich für ein anvisiertes<br />
Ziel der magnetische Richtungswinkel an der Kompassnadel ablesen.<br />
• Die einfachste für geodätische Zwecke eingesetzte Bussole ist die Diopterbussole,<br />
die sowohl mit Kompassnadel als auch mit elektronischen Sensoren angeboten<br />
wird.<br />
Hat die Bussole als Visiereinrichtung ein Fernrohr mit Distanzfäden, dazu einen<br />
Höhen- und Horizontalkreis, Klemm- und Feinbewegungseinrichtungen, so heißt<br />
die Bussole Tachymeterbussole.<br />
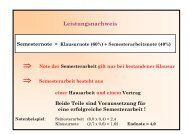
Beim Arbeiten mit den Bussolen ist die Ausrichtung in Richtung Norden zu definieren.<br />
• Es ist zwischen der Ausrichtung in der Abbildungsebene (Gitter Nord), zum geographischen<br />
Nordpol (Geographisch Nord) und zum magnetischen Nordpol (Magnetisch<br />
Nord) zu unterscheiden.<br />
• Die Abweichung zwischen dem geographischen und dem magnetischen Nordpol<br />
wird als magnetische Deklination δ bezeichnet und die Abweichung zwischen<br />
Gitter- und Geographisch-Nord heißt Meridiankonvergenz γ (siehe Landesvermessung).<br />
Die für das praktische Arbeiten erforderliche Abweichung zwischen Gitter- und<br />
Magnetisch-Nord wird als Nadelabweichung α bezeichnet.<br />
• Die Kurven, die Orte mit gleicher magnetischer Deklination verbinden, heißen Isogonen.<br />
Sie verlaufen nicht geradlinig zum magnetischen Nordpol, sondern sind durch<br />
regionale und lokale Einflüsse vielfach gestört. Der magnetische Nordpol unterliegt<br />
außerdem fortschreitenden säkulären Änderungen und periodischen täglichen<br />
Schwankungen.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)<br />
E'<br />
E''<br />
o<br />
u<br />
h
1 GRUNDLAGEN DER TACHYMETRIE 7<br />
Die säkuläre Änderung vermindert die Deklination in Deutschland um jährlich rund<br />
0, 15 ◦ und die tägliche Periode nimmt einen Wert von bis zu 10 ′ an.<br />
Gitternord<br />
Magnetisch<br />
Nord<br />
Geographisch<br />
Nord<br />
Magnetisch<br />
Nord<br />
Gitternord =<br />
Geographisch<br />
Nord<br />
Geographisch<br />
Nord<br />
Magnetisch<br />
Nord<br />
Gitternord<br />
Meridian Meridian<br />
Hauptmeridian<br />
Abbildung 2: Nordrichtungen in der Abbildungsebene<br />
1.3 Höhenlinien und Geländedarstellung<br />
Ziel tachymetrischer oder topographischer Vermessung:<br />
Herstellung und Fortführung topographischer Karten in den Maßstäben 1:5 000, 1:25<br />
000, 1:50 000, 1:100 000, 1:200 000, 1:500 000 und 1:1 000 000 (als Beispiel für die<br />
Bundesrepublik Deutschland).<br />
NebendiesenanalogenKartenwerkenwurde in den letzten Jahren auch verstärkt das<br />
digitale Kartenwerk im bundeseinheitlichen Verfahren des Amtlichen Topographisch<br />
Kartograpisch Informationssystems (ATKIS) aufgebaut. Diese Daten können auch zum<br />
Aufbau eines digitalen Geländemodells genutzt werden.<br />
In Karten werden dargestellt:<br />
- Situation (Verkehrswege, Gewässer, Ortschften,...)<br />
-Namen<br />
• Gelände<br />
– wird durch Höhenpunkte und/oder Höhenlinien dargestellt<br />
Höhenpunkten sind hier Punkte im Gelände, deren Lage und Höhe in einem<br />
örtlichen oder dem Landeskoordinatensystem gegeben sind.<br />
Digitale Geländemodelle bestehen aus solchen Höhenpunkten.<br />
Auch in den Karten werden einzelne Höhenpunkte mit ihren Höhen für herausragende<br />
Geländepunkte wie Bergspitzen, Mulden, Sattel, Straßenkreuzungen<br />
usw. dargestellt.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
1 GRUNDLAGEN DER TACHYMETRIE 8<br />
• Die durchgehende Darstellung der dritten Dimension erfolgt in zweidimensionalen<br />
Karten über Höhenlinien, die auch als Schichtlinien, Niveaukurven oder Isohypsen<br />
bezeichnet werden.<br />
– Höhenlinien sind Kurven, die Punkte gleicher Höhe miteinander verbinden.<br />
– In Gebieten unter der Bezugsfläche werden die Linien gleicher Höhe als Tiefenlinien<br />
oder Isobathen bezeichnet. (Vermessung des Meeresbodens: Bathymetrie)<br />
– Beim Aufbau des Höhenlinienbildes ist die passende Äquidistanz (Höhenunterschied<br />
benachbarter Höhenlinien) in erster Linie von der Geländeneigung<br />
und dem Maßstab abhängig.<br />
In zweiter Linie ist die geforderte Genauigkeit der Höhenaufnahme zu beachten<br />
und die Darstellung von Kleinformen zu berücksichtigen.<br />
– Sind bemerkenswerte Bodenformen durch die Wahl der Äquidistanz nicht darstellbar,<br />
so können auch Hilfshöhenlinien mit geringeren Schichthöhen eingeführt<br />
werden.<br />
– Die Wahl der Schichthöhen ist stark vom Verwendungszweck des Ergebnisses<br />
abhängig.<br />
” Regel“: In bewegtem Gelände ab dem Maßstabsbereich 1:5 000 wählt man<br />
Schichthöhen, die sich in m als Maßstabszahl dividiert durch 1000 berechnen.<br />
Für den Maßstab 1:5 000 würde man also eine Schichthöhe von 5m einführen.<br />
– Der Verlauf der Höhenlinien wird in den meisten Fällen rechnerisch interpoliert<br />
(Computerprogramme).<br />
Gängige Wege sind Dreiecksvermaschung zur Interpolation der Punkte gleicher<br />
Höhe oder funktionale Ansätze.<br />
Hierbei werden allerdings die Grundsätze einer Handbearbeitung wie<br />
∗ Interpolation nur zwischen den größten Höhenunterschieden und<br />
∗ Abhängigkeiten benachbarter Höhenlinien<br />
nur unzureichend eingehalten.<br />
• Das Ergebnis ist bei beiden Verfahren sehr stark von einer guten Aufnahme des<br />
Geländes abhängig, wobei markante Geländeformen durch eigene Punkte aufzunehmensindundkünstliche<br />
Oberflächenformen wie Böschungen, Einschnitte, Gräben<br />
und dergleichen eigenständig aufzunehmen und darzustellen sind.<br />
1.4 Genauigkeit der Geländeaufnahme<br />
• Bei analog hergestellten Karten ist die Kartiergenauigkeit immer geringer als die<br />
Aufnahmegenauigkeit.<br />
Man geht in diesem Fall von einer Kartiergenauigkeit von (0,2mm aus, was bei<br />
einem Maßstab von 1:1000 (0,2m und beim Maßstab 1:5000 (1,0m in der Natur<br />
entspricht.<br />
• In die Genauigkeit der Höhenlinien geht neben diesem Kartierfehler die Unsicherheit<br />
beim Entwerfen der Höhenlinien ein.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
1 GRUNDLAGEN DER TACHYMETRIE 9<br />
• Zur Abschätzung des Höhenfehlers einer Höhenlinie nutzt man die Koppesche<br />
Formel.<br />
Nach Koppe berechnet sich die Standardabweichung der Höhe eines Punktes auf<br />
der Höhenlinie über die beiden vom Maßstab abhängenden Konstanten a und b<br />
sowie den Neigungswinkel α wie folgt.<br />
sH = ±(a + b tan α) (7)<br />
Der Höhenfehler wächst also proportional zum Tangens der Geländeneigung.<br />
Multipliziert man den Höhenfehler mit cot α erhält man für ein gleichmäßig geneigtes<br />
Gelände die Standardabweichung der Lage eines Punktes auf der Höhenlinie.<br />
sL = ±(b + a cot α) (8)<br />
• Für die Deutsche Grundkarte 1:5 000 hat der ehemalige Beirat für das Deutsche<br />
Vermessungswesen im Jahre 1924 die beiden Konstanten zu a =0, 4 und b =5<br />
für die Berechnung der Grenzwerte nach der Koppeschen Formel festgelegt.<br />
Damit ergeben sich in Abhängigkeit vom Neigungswinkel α folgende Werte für die<br />
beiden Standardabweichungen:<br />
α sH sL<br />
[gon] [m] [m]<br />
0 0,4<br />
1 0,5 30<br />
2 0,6 18<br />
3 0,6 14<br />
α sH sL<br />
[gon] [m] [m]<br />
5 0,8 10<br />
10 1,2 7,5<br />
20 2,0 6,2<br />
30 2,9 5,8<br />
• Die Arbeitsgemeinschaft der Vermessungsverwaltungen der Bundesrepublik<br />
Deutschland (AdV) hat in einem Beschluss vom 12.11.1970 die Genauigkeitsanforderungen<br />
an die Deutsche Grundkarte 1:5 000 weiter verfeinert.<br />
Nach diesem Beschluss wird in ” plansichere“ Punkte und Punkte auf Höhenlinien<br />
sowienachKartenmitÄquidistanzen unter einem Meter und allen anderen Karten<br />
unterschieden.<br />
Für ” plansichere“ Punkte soll dabei die Standardabweichung in der Lage ±3m<br />
und in der Höhe beim ersten Kartentyp ±0,2m sowie beim zweiten Kartentyp<br />
±0,3m nicht überschreiten.<br />
Für die Punkte auf Höhenlinien gelten die in der nachfolgenden Tabelle dargestellten<br />
Grenzwerte für Höhenabweichungen, die in Ausnahmefällen um 100%<br />
überschritten werden dürfen.<br />
Geländeneigung Höhenlinienabstand [m] zulässige Abweichung<br />
α[ ◦ ] α % vertikal horizontal [m]<br />
von bis von bis von bis<br />
3 5 1 ∞ 20 0,6<br />
3 8 5 12 2,5 50 20 1,3<br />
8 15 12 25 5 40 20 2,0<br />
15 30 25 50 10 40 20 3,0<br />
30 50 4,0<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
2 KLASSISCHE TACHYMETERAUFNAHME 10<br />
2 Klassische Tachymeteraufnahme<br />
Bei der klassischen Tachymeteraufnahme werden relativ zu einem Aufnahmestandpunkt<br />
durch Messung der Horizontal-, der Vertikalwinkel und der Strecken die Koordinatenund<br />
Höhenunterschiede ermittelt.<br />
Hierzu sind Lagekoordinaten und Höhe des Standpunktes durch Anschlussmessungen<br />
an das Festpunktfeld zu bestimmen.<br />
Bei größeren Aufnahmegebieten wird man die notwendige Anzahl von Aufnahmepunkten<br />
durch Tachymeterzüge miteinander verbinden.<br />
2.1 Tachymeterzüge<br />
• Der Tachymeterzug dient der Einbindung der Aufnahmepunkte in das übergeordnete<br />
Lage- und Höhenfestpunktfeld.<br />
• Für die lagemäßige Bestimmung sollte möglichst an zwei Lagefestpunkte angeschlossen<br />
werden und auch die Höhenübertragung sollte über zwei Höhenfestpunkte<br />
erfolgen.<br />
• Der Tachymeterzug stellt in der Lage einen Polygonzug und in der Höhe ein trigonometrisches<br />
Nivellement dar.<br />
-Damitmüssen für den Polygonzug die Brechungswinkel sinnvollerweise in zwei<br />
Lagen gemessen werden.<br />
Die Schrägstrecken werden direkt mit den elektronischen Tachymetern oder über<br />
die Distanzfäden bei den Tachymetertheodoliten nach (Gleichung 3) ermittelt.<br />
Zur Reduktion auf die Horizontale sind zusätzlich die Zenitdistanzen bei diesen<br />
beiden Instrumententypen zu bestimmen oder es erfolgt eine direkte Bestimmung<br />
beim Reduktionstachymeter.<br />
Die Bestimmung der Lagekoordinaten erfolgt als Polygonzug in Abhängigkeit von den<br />
gegebenen Anschlüssen, wobei jedoch auf eine Kontrollmöglichkeit (Freiheitsgrad > 0)<br />
zu achten ist.<br />
• beidseitig angeschlossener Zug<br />
F1<br />
�1<br />
F2<br />
s1<br />
�2<br />
P1<br />
s2<br />
�3<br />
P2<br />
�4<br />
s3 s4<br />
P3<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)<br />
�5<br />
F3<br />
F4<br />
gegeben:<br />
x und y in den Punkten F1 bis F4<br />
gemessen:<br />
Brechungswinkel β1 bis β5<br />
Strecken s1 bis s4<br />
gesucht:<br />
Koordinaten der Punkte P1 bis P3
2 KLASSISCHE TACHYMETERAUFNAHME 11<br />
Freiheitsgrad: 3 ((n +2)Winkel +(n +1)Strecken− (2n)Koord.)<br />
Berechnung: Verteilen des Winkelwiderspruchs, fortgesetztes polares<br />
Anhängen mit Verteilen des Koordinatenwiderspruchs bzw.<br />
fortgesetztes polares Anhängen mit anderen<br />
Verteilungsverfahren für die Widersprüche<br />
• nur einseitig angeschlossener (toter) Zug<br />
F1<br />
�1<br />
F2<br />
s1<br />
�2<br />
P1<br />
s2<br />
�3<br />
P2<br />
s3<br />
Freiheitsgrad: 0 (n·[Winkel]+n·[Strecken] − 2n·[Koordinaten])<br />
Berechnung: durch fortgesetztes polares Anhängen<br />
• beidseitig koordinatenmäßig angeschlossener Zug (Einrechnungszug)<br />
F2<br />
s1<br />
�1<br />
P1<br />
s2<br />
�2<br />
P2<br />
�3<br />
P3<br />
P3<br />
s3 s4<br />
F3<br />
gegeben:<br />
x und y in den Punkten F1 und F2<br />
gemessen:<br />
Brechungswinkel β1 bis βn<br />
Strecken s1 bis sn<br />
gesucht:<br />
Koordinaten der Punkte P1 bis Pn<br />
gegeben:<br />
x und y in den Punkten F2 und F3<br />
gemessen:<br />
Brechungswinkel β1 bis β3<br />
Strecken s1 bis s4<br />
gesucht:<br />
Koordinaten der Punkte P1 bis P3<br />
Freiheitsgrad: 1 (n·[Winkel]+n+1 · [Strecken] − 2n·[Koordinaten])<br />
Berechnung: durch fortgesetztes polares Anhängen und nachträgliche<br />
Koordinatentransformation (4 Parameter)<br />
• freier Zug<br />
P1<br />
s1<br />
�1<br />
P2<br />
s2<br />
�2<br />
P3<br />
�3<br />
s3 s4<br />
P4<br />
P5<br />
gemessen:<br />
Brechungswinkel β1 bis β3<br />
Strecken s1 bis s4<br />
gesucht:<br />
Koordinaten der Punkte P1 bis P5<br />
Freiheitsgrad: −3 (n−2 · [Winkel]+n−1 · [Strecken] − 2n·[Koordinaten])<br />
Berechnung: durch fortgesetztes polares Anhängen (nach Festlegung eines<br />
Punktes und einer Richtung zur Beseitigung des Rangdefektes)<br />
• freies Ringpolygon (Anfangs- und Endpunkt gleich)<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
2 KLASSISCHE TACHYMETERAUFNAHME 12<br />
�1<br />
s5<br />
P1<br />
s1<br />
�5<br />
P5<br />
�2<br />
P2<br />
s4<br />
s2<br />
P4<br />
P3<br />
�3<br />
s3<br />
�4<br />
gemessen:<br />
Brechungswinkel β1 bis β5<br />
Strecken s1 bis s5<br />
gesucht:<br />
Koordinaten der Punkte P1 bis P5<br />
Freiheitsgrad: 0 (n·[Winkel]+n·[Strecken] − 2n·[Koordinaten])<br />
Berechnung: durch fortgesetztes polares Anhängen (nach Festlegung eines<br />
Punktes und einer Richtung); Behandlung wie beidseitig<br />
angeschlossen<br />
Die höhenmässige Bestimmung des Tachymeterzuges erfolgt im trigonometrischen Nivellement.<br />
• Dazu sind mit den elektronischen Tachymetern oder den Tachmetertheodoliten<br />
die Höhenunterschiede zwischen der Kippachse und dem Punkt auf der Latte, der<br />
mit dem Mittelfaden angezielt ist, zu bestimmen.<br />
– Es wird die Zenitdistanz ermittelt und<br />
– die Strecke entweder direkt oder durch Ablesung an den Reichenbachschen<br />
Distanzfäden bestimmt.<br />
• Bei Reduktionstachymetern kann der gesuchte Höhenunterschied direkt abgelesen<br />
werden.<br />
• Zur Bestimmung des Höhenunterschiedes zwischen dem Instrumenten- und dem<br />
Lattenstandpunkt sind außerdem die Instrumentenhöhe und die Ablesung am Mittelfaden<br />
zur Berechnung nach der folgenden Formel zu ermitteln.<br />
2.2 Geländeaufnahme<br />
HZ − HS = E ′ cos(z)+i − m = h + i − m (9)<br />
• Eine gute Geländeaufnahme sollte sich am Gelände orientieren.<br />
Dabei sollten die Objektpunkte so gelegt werden, dass sie an markanten Punkten<br />
des Geländes liegen, an denen sich die Neigung des Geländes signifikant verändert.<br />
Damit wäre es sinnvoll diese Objektpunkte auf die Rücken- bzw. Muldenlinien zu<br />
legen.<br />
(Bereits aus der Rasteraufnahme der Erdoberfläche (2. Semester) bekannt.)<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
2 KLASSISCHE TACHYMETERAUFNAHME 13<br />
z<br />
Hs<br />
i<br />
E<br />
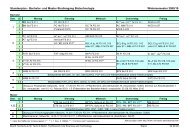
Abbildung 3: Trigonometrische Höhenübertragung<br />
E'<br />
h<br />
Hz<br />
Abbildung 4: Geländeaufnahme (Höhenlinien)<br />
Für das durch Höhenlinien skizzierte Gelände ist es sinnvoll, die Objektpunkte entlang der<br />
gestrichelten Linien zu plazieren. Solange der Geländeverlauf gleichmäßig wie auf der linken<br />
Seite ist, brauchen eigentlich nur zwei Objektpunkte am Anfang und am Ende aufgenommen<br />
werden.<br />
Ändert sich die Linie in der Richtung oder der Neigung sind zusätzliche Zwischenpunkte<br />
aufzunehmen wie es in dem Beispiel für die mittlere Linie der Fall ist.<br />
• Im Handriss werden die eingemessenen Punkte ungefähr maßstäblich eingetragen.<br />
Man zeichnet außerdem die Rückenlinien gestrichelt, die Muldenlinien geschlängelt<br />
und die Richtung des stärksten Gefälles mit ein.<br />
Man deutet an charakteristischen Stellen die Geländeformen durch Leitkurven an<br />
und vermerkt schließlich Böschungen, Gräben und dergleichen.<br />
• Die Bestimmung der Lage und der Höhe der Objektpunkte erfolgt relativ zu den<br />
Aufnahmepunkten über dreidimensionale Polarkoordinaten.<br />
2.3 Auswertung<br />
• Gegeben: dreidimensionale Polarkoordinaten (der Richtungs-, der Vertikalwinkel<br />
und die Schrägstrecke im Aufnahmestandpunkt zu den Objektpunkten)<br />
• Gesucht: Lagekoordinaten und Höhe des Objektpunktes relativ zu dem in Lage<br />
und Höhe bekannten Aufnahmestandpunkt<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)<br />
m
2 KLASSISCHE TACHYMETERAUFNAHME 14<br />
Kantenlinie<br />
Rückenlinie<br />
Muldenlinie<br />
Formlinie<br />
Fallinie<br />
Abbildung 5: Erfassung von Geländeformen und Auswahl von Geländepunkten<br />
• Lösung: Die Lagekoordinaten können durch polares Anhängen über den Richtungswinkel<br />
(der aus der Orientierung des Horizontalkreises zum Nachbarpunkt<br />
und der Richtung gewonnen wird) und die Horizontalstrecke (die aus der<br />
Schrägstrecke und dem Vertikalwinkel ermittelt wird) berechnet werden.<br />
Die Höhenübertragung kann über die Instrumentenhöhe im Standpunkt, der<br />
Lattenablesung, den Zenitwinkel und die Schrägstrecke erfolgen.<br />
⇒ Zur Erzeugung des Höhenlinienbildes aus den gewonnenen Stützpunktkoordinaten<br />
und Höhen ist ein Vermessungsriss wichtig, der die Mulden- und Rückenlinienverbindungen<br />
sowie Sonderformen wiedergibt (vgl. Abbildung 5).<br />
⇒ Dann erfolgt eine Interpolation auf die runden Höhenwerten aus den Stützpunkten<br />
entweder manuell oder über Computerprogramme.<br />
(Häufig erfolgt in DV-Programmen jedoch eine Dreiecksvermaschung für diese Interpolation,<br />
was wie das obige Beispiel zeigt nicht unbedingt sinnvoll ist.)<br />
⇒ Nach der Ermittlung dieser Stützpunkte können die Höhenlinien als Freihandkurven<br />
gezeichnet werden. In DV-Programmen werden diese Linien häufig als Splines<br />
konstruiert.<br />
2.4 Messtischaufnahme<br />
Die Messtischaufnahme gliedert sich in die Schritte<br />
• Vorbereitung der Aufnahme,<br />
• Zentrieren und Orientieren des Messtisches,<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
2 KLASSISCHE TACHYMETERAUFNAHME 15<br />
• eventuelle Bestimmung von Aufnahmepunkten und<br />
• das Bestimmen von Geländepunkten.<br />
○ Vorbereitung der Aufnahme:<br />
– Messtisch mit einem Zeichnungsträger bespannen<br />
– auf dem Zeichnungsträger sind (mindestens) zwei im Gelände sichtbare Festpunkte<br />
im Aufnahmemaßstab einzutragen<br />
– Kartennetz auf dem Zeichnungsträger einzuzeichnen<br />
– Liegt bei Fortführungen bereits ein Grundriss des Aufnahmegeländes vor, so<br />
wird eine Kopie im Aufnahmemaßstab auf dem Messtisch befestigt<br />
○ Zentrieren und Orientieren des Messtisches anhand der beiden Festpunkte:<br />
A<br />
a<br />
x<br />
x<br />
y<br />
c<br />
C<br />
y<br />
Abbildung 6: Messtischaufnahme (nach Kahmen)<br />
b<br />
– Der Messtisch wird über dem Festpunkt F1 zentriert, indem die in der Zeichnung<br />
gewonnenen Abstände x und y in die Örtlichkeit (auf den Boden) übertragen<br />
werden und der Mittelpunkt des Messtisches auf diesen Punkt zentriert<br />
wird.<br />
– Dann wird mit der Kippregelkante an die gezeichnete Linie F1, F2 gelegt und<br />
über den Punkt F2 orientiert.<br />
Dieser Vorgang sollte für mehrere Festpunkte in der Orientierung vorgenommen<br />
werden, um eine Kontrolle und eine Genauigkeitssteigerung zu erreichen.<br />
Voraussetzung für eine fehlerfreie Zentrierung und Orientierung ist dabei ein<br />
horizontierter Messtisch, was sich durch den Einsatz der beiliegenden Libelle<br />
erreichen lässt.<br />
– Die Höhe des Messtisches ist zu ermitteln.<br />
Alternativ kann die Bestimmung eines freien Aufnahmepunktes erforderlich sein.<br />
Die Bestimmung der Lage des freien Punktes in der Kartierung geschieht durch:<br />
– Vorwärtseinschneiden,<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)<br />
B
2 KLASSISCHE TACHYMETERAUFNAHME 16<br />
– Seitwärtseinschneiden,<br />
– Rückwärtseinschneiden zu zwei bzw. drei bekannten Punkten,<br />
– oder durch polares Anhängen an einen Festpunkt, wenn die Orientierung<br />
durch eine Bussole gewonnen wird.<br />
• Vorwärtseinschneiden<br />
Beim Vorwärtseinschneiden werden durch Zentrierung und Orientierung auf den<br />
beiden Festpunkten F1 und F2 nach der obigen Vorgehensweise mit der Kippregel<br />
in beiden Punkten der Aufnahmepunkt P angezielt und auf der Zeichenunterlage<br />
angerissen. Damit erhält man im Schnittpunkt das Abbild des Punktes P und kann<br />
über die obige Vorgehensweise sich auf P zentrieren und orientieren.<br />
F1<br />
(1)<br />
P<br />
(3)<br />
F2<br />
(2)<br />
Abbildung 7: Links: Vorwärtseinschneiden, Rechts: Seitwärtseinschneiden<br />
• Seitwärtseinschneiden<br />
Beim Seitwärtseinschneiden wird in F1 nach Orientieren auf F2 die Richtung nach<br />
P angerissen. Dann stellt man den Messtisch auf der Verbindung von F1 nach P<br />
auf und orientiert sich nach F1. Mit dem Einspielen der Kippregel im Abbild von<br />
F2 in Richtung auf F2 erhält man die Richtung zum Neupunkt P und im Schnitt<br />
das Abbild in der Zeichnung.<br />
• Rückwärtseinschneiden<br />
Beim Rückwärtseinschneiden sind drei Punkte in der Örtlichkeit und mit ihrem<br />
Abbild in der Kartierung erforderlich. Es ist darauf zu achten, dass diese drei<br />
Festpunkte nicht in der Nähe des gefährlichen Kreises liegen.<br />
Dann zeichnet man auf Pauspapier die Richtungen von einem beliebigen Punkt<br />
P zu den drei Festpunkten. Durch Verschieben und Verdrehen des Pauspapiers in<br />
den drei Strahlen durch die entsprechenden Punkte in der Zeichnung erhält man<br />
die Lage des Neupunktes P .<br />
Im letzten Schritt ist der Messtisch so zu orientieren, dass die Richtung von P zu<br />
einem Festpunkt im Bild und der Natur übereinstimmt.<br />
• Polares Anhängen<br />
Beim polaren Anhängen an einen Festpunkt ist zuerst die Richtung vom Festpunkt<br />
zum neuen Punkt in der Zeichnung zu bestimmen. Dazu ist mit der Bussole die Orientierung<br />
herzustellen und der Neupunkt über die gemessene Strecke zu kartieren.<br />
Dann zentriert man sich auf dem Neupunkt und orientiert sich zum Festpunkt.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)<br />
F1<br />
(1)<br />
P<br />
(2)<br />
F2
2 KLASSISCHE TACHYMETERAUFNAHME 17<br />
F1<br />
F2<br />
P<br />
F3<br />
Abbildung 8: Links: Rückwärtseinschneiden, Rechts: Polares Anhängen<br />
○ Eventuelle Bestimmung von weiteren Aufnahmepunkten<br />
○ Bestimmen von Geländepunkten:<br />
– Vom Aufnahmepunkt ausgehend wird die Richtung zum Objektpunkt direkt<br />
durch die Kippregel eingestellt und optisch die Horizontalstrecke ermittelt.<br />
P<br />
3<br />
1<br />
4<br />
2<br />
Nord<br />
F1<br />
Abbildung 9: Geländeaufnahme<br />
– Damit ist der Objektpunkt im entsprechenden Maßstab kartierbar.<br />
Der Höhenunterschied zum Standpunkt lässt sich aus den gleichen Messungselementen<br />
mit der Instrumentenhöhe und der Lattenablesung am Mittelfaden<br />
ermitteln.<br />
– Damit ist ein vollständiges Abbild des Geländes in der Lage entstanden und<br />
es kann aus den Höhenangaben ein Höhenlinienbild in der oben erläuterten<br />
Art abgeleitet werden.<br />
Neben der Geländeaufnahme ist das Messtischverfahren auch nur zur zweidimensionalen<br />
Aufnahme der Situation (Gebäude, Topographie etc.) mit ausgewählten Höhenpunkten<br />
(z. B. Straßenkreuzungen) zur Kartenherstellung genutzt worden.<br />
2.5 Bussolentachymetrie<br />
• Mit einer Bussole lässt sich ein Tachymetertheodolit genähert und nach Korrektur<br />
mit ausreichender Genauigkeit nach Norden ausrichten.<br />
Das wird beim Aufbau der Tachymeterzüge ausgenutzt.<br />
• Die Aufnahme der Objektpunkte erfolgt analog zur Aufnahme mit den Tachymetertheodoliten.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)<br />
F1<br />
P
3 MODERNE TACHYMETERAUFNAHME 18<br />
Magnetisch<br />
Nord<br />
• Bussolenzüge sind Polygonzüge mit recht kurzen Seitenlängen.<br />
Sie werden mit sogenannten Sprungständen aufgebaut, was bedeutet, dass nur<br />
jeder zweite Standpunkt mit dem Instrument besetzt wird.<br />
Der Vorteil besteht darin, dass auch in schlecht einsehbarem Gelände gearbeitet<br />
werden kann.<br />
• Zur Bestimmung der Nadelabweichung sind am Anfang und am Ende des Zuges<br />
auf bekannten Punkten weitere bekannte Punkte anzumessen.<br />
Gitternord<br />
F2<br />
s1<br />
F1<br />
P1<br />
Magnetisch<br />
Nord<br />
s2<br />
P2<br />
Gitternord<br />
Magnetisch<br />
Nord<br />
s3 s4<br />
P3<br />
F3<br />
F4<br />
gegeben:<br />
x und y in den Punkten F1 bis F4<br />
gemessen:<br />
Azimute (bezogen auf Magnetisch-Nord)<br />
in F1 nach F2 und 1<br />
Azimute in 2 nach 1 und 3<br />
Azimute in F3 nach F4 und 3<br />
alle Strecken zwischen F1 und F3<br />
gesucht:<br />
Koordinaten der Punkte P1 bis P3<br />
Berechnung: Im ersten Schritt ist die Nadelabweichung als zeitliche Funktion aus<br />
den gemessenen Azimuten und den bekannten Richtungswinkeln zu<br />
ermitteln. Im zweiten Schritt sind die gemessenen Azimute mit der<br />
Funktion der Nadelabweichung zu korrigieren. Damit liegen in allen<br />
Punkten Richtungswinkel und Strecken zur Ermittlung der<br />
Koordinaten der Neupunkte über einen Polygonzug vor.<br />
• Der geringen Richtungsgenauigkeit beim Bussolentachymeter steht entgegen, dass<br />
ein Richtungsfehler nur den betroffenen Stahl und nicht den ganzen folgenden Zug<br />
wie bei der Messung von Brechungswinkeln verschwenkt.<br />
• Da die Nadelabweichung eine Funktion in Abhängigkeit von längeren zeitlichen<br />
Perioden (säkulären Änderungen) und außerdem eine Abhängigkeit von der Tageszeit<br />
(periodischen täglichen Schwankungen) aufweist, ist darauf zu achten,<br />
dass die Bestimmung der Nadelabweichungen günstig zur Bestimmung der beiden<br />
Abhängigkeiten über den Messungszeitraum verteilt wird.<br />
3 Moderne Tachymeteraufnahme<br />
Unter der modernen Tachymeteraufnahme versteht man nicht nur den Einsatz moderner<br />
Messverfahren, wie Tachymetrie mit elektronischen Messsystemen oder den<br />
Einsatz von GPS, sondern auch moderne Auswerteverfahren.<br />
Hierzu zählt:<br />
- der Einsatz der elektronischen Datenverarbeitung, der bereits im Feld beginnt und<br />
durchgehend bis zur Bearbeitung der Ergebnisse durchgeführt wird.<br />
Rationalisierungseffekte durch:<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 19<br />
– automatisierten Datenfluss und<br />
– graphisch-interaktive Bearbeitung<br />
3.1 Planung, Vorbereitung und Punktverdichtung<br />
• In Abhängigkeit davon, welche Grundlagen für das zu vermessende Gebiet vorliegen,<br />
wird man großflächiger oder engmaschiger das Gelände aufnehmen müssen.<br />
• Liegt der Grundriss bereits in ausreichender Güte vor, müssen nur noch die für die<br />
Oberflächenstruktur charakteristischen Punkte in der Lage und der Höhe bestimmt<br />
werden.<br />
• Liegt die Grundrissstruktur gar nicht oder nur unzureichend vor, müssen sowohl<br />
die Lage als auch die Höhen der Geländepunkte tachymetrisch oder über Satellitenverfahren<br />
bestimmt werden.<br />
Als Grundlage für die Aufnahme werden Anschlüsse an das amtliche Festpunktfeld in der<br />
Lage und der Höhe benötigt.<br />
• Sinnvoll wären dreidimensionale Anschlusspunkte, welche jedoch in den meisten<br />
Fällen nicht vorliegen werden.<br />
Die vorhandenen Anschlusspunkte werden in den meisten Fällen nicht ausreichen,<br />
um die notwendigen Tachymeteraufnahmepunkte im übergeordneten System zu<br />
koordinieren. Damit werden Punktverdichtungen als Tachymeterzüge oder über<br />
GPS erforderlich.<br />
• Die Lage der Aufnahmepunkte wird sich an der Örtlichkeit orientieren und es<br />
werden dementsprechend bei schlecht einsehbarem Gelände mehr Punkte für die<br />
Aufnahme erforderlich sein.<br />
Eine Einschränkung aufgrund der Reichweite der eingesetzten Instrumente wird<br />
dabei bei den elektronischen Tachymetern kaum und bei GPS gar nicht auftreten.<br />
• Beim Einsatz von GPS erfolgt die Einbindung in das amtliche Lagefestpunktfeld<br />
entweder über den Einsatz von SAPOS (Anschluss an bekannte Referenzstationen)<br />
oder durch das Einbinden von GPS-Messungen auf Festpunkten.<br />
• Für eine genauere Höhenübertragung (unter einem Zentimeter) ist zur Zeit das<br />
GPS-Verfahren noch nicht geeignet und man muss eine Höhenübertragung aus<br />
dem amtlichen Höhenfestpunktfeld durchführen.<br />
Allerdings wird die GPS-Höhenbestimmung mit Subzentimetergenauigkeit auch in<br />
Echtzeit möglich werden (Verwendung von Geoidmodellen).<br />
• Bei der Planung der Geländeaufnahme sollte berücksichtigt werden, in welcher<br />
Form der Datenfluss von der Messung bis zur Aufbereitung der Ergebnisse durchgeführt<br />
werden soll.<br />
– Datenfluss durchgehend physikalisch durchführbar?<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 20<br />
– Sollen weitergehende Informationen im Datenfluss aus dem Feld bis zum<br />
Auswertesystem transportiert werden?<br />
– Können die Informationen in allen Zwischenschritten von den auswertenden<br />
Programmen übernommen werden?<br />
Hierbei ist denkbar, dass durch Verschlüsselung der Punkte das Auswerteprogramm<br />
die vollständige Information zu Erstellung der Ergebnisse erhält.<br />
Alternativ können zusätzliche Informationen wie die Art der aufgenommenen<br />
Punkte auch in einem Handriss geführt werden.<br />
3.2 Aufnahme und Registrierung mit elektronischen Messsystemen<br />
Beim Arbeiten mit elektronischen Messsystemen erhält man dreidimensionale polare<br />
Koordinaten des Neupunktes relativ zum Aufnahmepunkt.<br />
Ist der Aufnahmepunkte in der Lage und der Höhe bekannt und der Horizontalkreis<br />
orientiert kann man für den Neupunkt kartesische Koordinaten bestimmen.<br />
• Als Messsysteme werden Tachymeter angeboten, bei welchen der Reflektor im Objektpunkt<br />
vom Beobachter angezielt werden muss.<br />
Zur Einsparung von Personal werden mittlerweile auch Messroboter eingesetzt, bei<br />
denen über eine Funkverbindung und eine Zielverfolgung die Aufnahme vom Reflektor<br />
aus gesteuert werden kann.<br />
In diesem Fall kann der Beobachter entfallen, da die notwendigen Informationen<br />
wie Punktnummer, Punktart etc. vom Reflektor zum Gerät mit Funk übertragen<br />
werden und das Gerät dem Reflektor mittels motorischem Antrieb und Mustererkennung<br />
für den Reflektor automatisch folgt.<br />
• Zur Erfassung der Geländepunkte können Stangen mit bis zu 8m Länge mit<br />
aufgesetztem Reflektor (alternativ zum normalen Tachymeterstab) benutzt<br />
werden.<br />
• In vielen Fällen wird man Objektpunkte nur exzentrisch anzielen können und muss<br />
die Exzentrizität e bei der Umrechnung der Messungen auf das Zentrum berücksichtigen.<br />
Bei seitwärts liegenden Exzentren müssen sowohl die Strecke als auch<br />
der Horizontalwinkel korrigiert werden.<br />
Bei auf dem Zielstrahl liegenden Exzentren muss dagegen nur die Strecke um den<br />
Exzentrizitätswert korrigiert werden.<br />
(manche Geräte erlauben auch die getrennte Bestimmung von Richtung und<br />
Strecke)<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 21<br />
r E<br />
r<br />
s E<br />
s<br />
r = rE +arcsin( e<br />
sE<br />
e<br />
) s =<br />
gemessen:<br />
rE, sE und e<br />
gesucht:<br />
r und s<br />
�<br />
s 2 E − e 2 (10)<br />
• Diese Berechnungen und auch die Ermittlung der Koordinaten und der Höhen lässt<br />
sich mit der geräteeigenen Software durchführen.<br />
• Für den Austausch der Messungselemente, abgeleiteter Messungselemente oder<br />
der Koordinaten werden die Daten in Austauschformaten aufbereitet.<br />
Jeder Instrumentenhersteller bietet hierbei sein eigenes Austauschformat an.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 22<br />
Exemplarisch werden nachfolgend Formate der Firmen Leica, Zeiss und TOPCON<br />
angegeben.<br />
Format GRE3/4 der Firma Leica:<br />
410001+00000001 42....+00020998 43....+00000009 44....+00081098<br />
410002+00000020 42....+00000493 43....+00043911<br />
410003+00000050 42....+00000000<br />
110004+00000494 21.102+24064700 22.102+10084400 31..00+00318171 51....+0010+007<br />
71....+02143912<br />
110006+00000001 21.102+13534000 22.102+09945400 31..00+00101663 51....+0010+007<br />
71....+02100999<br />
Diese fünf Datensätze geben im Standpunkt 493 43911 die Schrägstrecken, Horizontalrichtungen<br />
und Zenitdistanzen zu den Punkten 494 43912 und 1 999 wider.<br />
Die entsprechenden Werte sind zum ersten Punkt s = 318, 171m, r = 240, 647gon<br />
und z = 100, 844gon sowie zum zweiten Punkt s = 101, 663m, r = 135, 340gon und<br />
z =99, 454gon.<br />
Format REC500 der Firma Zeiss:<br />
1 60 Y 4590424.677 X 5824696.166 Z 0.00<br />
2 130199-3 Y 4590405.847 X 5824716.534 Z 0.00<br />
3 130199-3 m 1.000011 0m 337.6172 ih 0.00<br />
4 Polarpunktmessung m 1.000011<br />
5 2 D 39.552 Hz 344.6994 V1 298.167<br />
6 2 Y 4590443.867 X 5824727.375 Z 0.00<br />
7 60 D 27.031 Hz 387.7024 V1 297.186<br />
8 60 dY -6.067 dX -9.908 dZ 0.00<br />
Diese acht Datensätze geben im Standpunkt 130199-3 eine Polarpunktmessung wieder.<br />
Es sind die Koordinaten des Standpunktes, der Maßstab und die Orientierung des Horizontalkreises<br />
angegeben.<br />
Zum Punkt 2 sind die Schrägstrecke, die Horizontalrichtung und die Zenitdistanz gespeichert,<br />
aus denen sich auch die nachfolgenden Koordinaten berechnen lassen.<br />
Für den Zielpunkt 60 liegen die gleichen Messungen vor, nur dass sich hier aus den berechneten<br />
Koordinaten die Differenzen zu den gegebenen Koordinaten ermitteln lassen<br />
und ausgegeben werden.<br />
Format M5 der Firma Zeiss:<br />
For M5|Adr 1|PI1 60|y 4590424.6770 m |x 5824696.1660 m |z %%@<br />
0.0000 m |<br />
For M5|Adr 2|PI1 130199-3|y 4590405.8470 m |x 5824716.5340 m |z %%@<br />
0.0000 m |<br />
For M5|Adr 3|PI1 130199-3|m 1.000011 |0m 337.61720 gon %%@<br />
|ih 0.0000 m |<br />
For M5|Adr 4|TI Polarpunktmessung |m 1.000011 | | %%@<br />
|<br />
For M5|Adr 5|PI1 2|D 39.5520 m |Hz 344.69940 gon %%@<br />
|V1 298.16700 gon |<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 23<br />
For M5|Adr 6|PI1 2|y 4590443.8670 m |x 5824727.3750 m |z %%@<br />
0.0000 m |<br />
For M5|Adr 7|PI1 60|D 27.0310 m |Hz 387.70240 gon %%@<br />
|V1 297.18600 gon |<br />
For M5|Adr 8|PI1 60|dy -6.0670 m |dx -9.9080 m %%@<br />
|dz 0.0000 m |<br />
Bei diesem Format sind die gleichen Elemente wie im vorhergehenden Beispiel angegeben.<br />
Man erkennt hierbei sehr deutlich, die Ähnlichkeit zwischen den beiden<br />
Zeiss-Formaten.<br />
Ähnlich verhält es sich bei den Leica-Formaten GRE3, GRE4 und GIF10.<br />
Format GTS-700 der Firma TOPCON:<br />
GTS-800 v3.2<br />
JOB D:\TEST<br />
UNITS M,G<br />
SCALE 0.999892,0.999892,0.000000<br />
DATE 26/04/00,18:29:43<br />
TEMP 25,980<br />
RES OBS 2,0.000,1<br />
SD 344.69940,298.16700,39.5520<br />
RES OBS 60,0.000,1<br />
SD 387.70240,297.18600,27.0310<br />
Vorlauf<br />
Auftrag, Beschreibung<br />
Maßeinheit, hier m und gon<br />
Maßstabsfaktor<br />
Datum, Uhrzeit<br />
Temperatur, Luftdruck<br />
Punktnummer, Zielhöhe und Zähler bei freier Stationierung<br />
Horizontalwinkel, Vertikalwinkel, Schrägstrecke<br />
Punktnummer, Zielhöhe und Zähler bei freier Stationierung<br />
Horizontalwinkel, Vertikalwinkel, Schrägstrecke<br />
Bei diesem Format sind die gleichen Elemente wie im vorhergehenden Beispiel angegeben.<br />
Die Koordinaten als Ausgangs- oder als Ergebnisdaten stehen in einer eigenen<br />
Datei entsprechend dem nachfolgenden Beispiel mit den obigen Koordinatenwerten.<br />
Koordinatenformat der Firma TOPCON:<br />
60,4590424.6770,5824696.1660,0.0000,PT<br />
1301993,4590405.8470,5824716.5340,0.0000,PT<br />
2,4590443.8670,5824727.3750,0.0000,PT<br />
Man erkennt bereits an diesen vier Beispielen sehr anschaulich den Aufbau der<br />
Austauschformate. Hier wird also entweder mit Stellungsparametern, die in der Datenreihenfolge<br />
an einer bestimmten Stelle bzw. auch in einem bestimmten Spaltenbereich<br />
stehen müssen, oder mit Schlüsselzahlen, die die Bedeutung der nachfolgenden Zahlenwerte<br />
angeben, gearbeitet.<br />
3.3 Automatischer Datenfluss<br />
• Der Sinn des automatischen Datenflusses besteht darin, dass die Datenweitergabe<br />
sehr effektiv und sehr sicher durchgeführt wird.<br />
Dabei werden die Daten in einem mit dem Instrument verbundenen Speicher<br />
gesichert. Im nächsten Schritt werden diese Daten auf einen PC übertragen.<br />
Auf dem PC erfolgt dann der Datenfluss bis zum Auswerteprogramm, z.B. der<br />
interaktiven graphischen Bearbeitung.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 24<br />
Gerätespeicher<br />
z.B. GRE4 oder REC 500<br />
↓<br />
PC mit serieller<br />
Schnittstelle<br />
Physikalischer Datenfluss<br />
ohne Änderung der<br />
Datenstruktur<br />
• Beim physikalischen Datenfluss zwischen dem geräteeigenen Datenspeicher und<br />
dem Auswerte-PC muss der Datenfluss physikalisch möglich sein, d.h.:<br />
– Das Übertragungsprotokoll und die Übertragungsgeschwindigkeit muss festgelegt<br />
werden<br />
– Es werden zwei Programme zur Übertragung der Daten gestartet (im PC und<br />
im Instrument)<br />
Sie steuern die Übertragung durch das gegenseitige Zusenden von Steuerzeichen.<br />
Welche Art von Zeichen mit welcher Aussage gesendet werden, hängt<br />
von den eingesetzten Programmen ab.<br />
−→ DamitsinddieDatenaufdenverarbeitenden PC im vorgegebenen Format übertragen.<br />
• Am PC müssen Formatumwandlungen der Messungsdaten zur Verarbeitung in<br />
einem geodätischen Berechnungsprogramm bzw. Formatumwandlungen der Koordinatenwerte<br />
in das interaktive-graphische Auswertesystem durchgeführt werden.<br />
Hierbei ist es wichtig, dass keine eventuell vorhandenen Verschlüsselungen verloren<br />
gehen!<br />
– Die Beobachtungsdaten können im Feld bereits so verschlüsselt werden, dass<br />
das auswertende Programm erkennt, um welche Art von Objektpunkt es sich<br />
handelt.<br />
– Die Verschlüsselung orientiert sich dabei am Auswerteprogramm oder wird<br />
in der landesweit einheitlichen Form des OSKA (Objektschlüsselkatalog der<br />
Automatisierten Liegenschaftskarte (ALK)) vorgenommen.<br />
– Da beide Verfahren im Feld die Kenntnis eines umfangreichen Schlüsselkatalogs<br />
und auch die Eingabe recht langer Schlüsselzahlen bedingen, können im<br />
Feld auch abgekürzte Schlüsselzahlen genutzt werden, die für die eigentliche<br />
Bearbeitung jedoch umgesetzt werden müssen.<br />
• Das Ergebnis wird häufig nicht nur graphisch ausgegeben, sondern in digitaler<br />
Form weitergereicht.<br />
– Für den Austausch der Graphikdaten hat sich im PC-Bereich das Drawing<br />
Exchange Format (DXF) durchgesetzt.<br />
Der Nachteil dieses Formats besteht darin, dass keine logischen Informationen<br />
zu den Graphikdaten mitübertragen werden.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 25<br />
Daten der<br />
Feldspeicher<br />
im entsprechenden<br />
Format<br />
Formatumwandlung<br />
Formatumwandlung<br />
Umwandlung der<br />
Verschlüsselung<br />
Grafischinteraktive<br />
Bearbeitung<br />
Geodätische<br />
Berechnungen<br />
Formatumwandlung<br />
Grafische<br />
Ausgabe der<br />
Ergebnisse<br />
PC<br />
Abbildung 10: Flussbild der Datenverarbeitung im PC<br />
– Beim Austausch von Graphikdaten einschließlich der logischen Zusammenhänge<br />
wird zumindestens in Deutschland sehr häufig die Einheitliche Datenbankschnittstelle<br />
(EDBS) eingesetzt.<br />
Dieses Format ist eine lineare Abbildung der Datenstruktur der ALK bzw.<br />
ATKIS und überträgt dementsprechend sowohl die graphischen Elemente als<br />
auch den logischen Zusammenhang dieser Elemente in Folienanordnung.<br />
3.4 Graphisch-interaktive Bearbeitung im Innendienst<br />
• Für die graphisch interaktive Bearbeitung der Ergebnisse liegen im PC-Bereich eine<br />
Vielzahl von Systemen vor (z. B. Geograph, CADDY).<br />
• Auch im kommerziellen Bereich liegen meist auf dem Betriebssystem UNIX eine<br />
ganze Reihe von Systemen vor (z. B. SICAD, DAVID, GIAP).<br />
• Beide Bereiche haben sich in den letzten Jahren stark in die Richtung von<br />
Geoinformationssystemen (GIS) angenähert.<br />
Für geodätische Anwendungen kommen eigentlich nur noch Systeme mit der<br />
Ausrichtung GIS in Frage. Das bedeutet, dass nicht nur die reine Graphik<br />
aufgebaut und gespeichert wird sondern auch eine logische Strukturierung der<br />
Datenvorgenommenwird.<br />
• Es erfolgt eine Klassifizierung der Daten nach dem Folienkonzept oder in Ebenen<br />
bzw. Layern, was dem Zusammenfassen gleichartiger Objekte entspricht.<br />
Nachfolgend sind die Folien der ALK als Beispiel für diese Klassifizierung aufgeführt.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 26<br />
Folie Inhalt<br />
001 Flustücke<br />
002 Gemarkung, Flur<br />
003 Politische Grenzen<br />
011 Gebäude<br />
021 Flächen der tatsächlichen Nutzung<br />
023 Grenzeinrichtungen<br />
028 Geländeform<br />
050 Numerierte Punkte der Punktart 0 (TP)<br />
051 Numerierte Punkte der Punktart 1 (AP)<br />
052 Numerierte Punkte der Punktart 2 (Grenzpunkt)<br />
053 Numerierte Punkte der Punktart 3 (Gebäudepunkt)<br />
054 Numerierte Punkte der Punktart 4 (Topographischer Punkt)<br />
055 Numerierte Punkte der Punktart 5 (Sonstiger Punkt)<br />
058 Numerierte Punkte der Punktart 8 (Schwerepunkt)<br />
059 Numerierte Punkte der Punktart 9 (Nivellementspunkt)<br />
061 Kommunale Abgrenzungen<br />
062 Grundstücksbezogene Grenzen<br />
063 Andere gesetzliche Grenzen<br />
064 Versorgung und Entsorgung<br />
071 Kartenblatt, -rahmen und -rand<br />
081 Basistopographie Flurkarte<br />
082 Ergänzungstopographie<br />
085 Länderspezifische Punktdarstellung<br />
086 Länderspezifische Gebäudedarstellung<br />
520 Baumkataster<br />
• Nach dieser logischen Sortierung der graphischen Elemente (Punkt, Linie, Bögen<br />
und Flächen) erfolgt eine Verschlüsselung dieser Elemente und eine Zusammenfassung<br />
zu logischen Objekten.<br />
Beispiel ALK:<br />
Die Objektdefinitionen sind im Objektabbildungskatalog (OBAK) und die Verschlüsselungen<br />
im Objektschlüsselkatalog (OSKA) festgeschrieben.<br />
Im OBAK ist z. B. für ein Gebäude festgelegt, wie der Name des Gebäudes<br />
aufgebaut ist, dass das Gebäude flächenförmig ist und welche geometrischen<br />
Elemente mit welchen Schlüsselzahlen zulässig sind.<br />
Schlüssel Bedeutung<br />
1013 Begrenzungslinie eines<br />
nichtöffentlichen Geb.<br />
1014 Offene Begrenzungslinie<br />
1033 Anzahl der Vollgeschosse<br />
1041 Durchfahrt im Gebäude<br />
1045 Markierung für Überdachung<br />
1013<br />
1041<br />
1033<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)<br />
V<br />
1045<br />
1013<br />
1014
3 MODERNE TACHYMETERAUFNAHME 27<br />
• Die Speicherung der Geometrie (Punkte, Linien und Bögen) erfolgt bei der ALK<br />
redundanzfrei.<br />
Das bedeutet, dass ein Punkt oder eine Linie nur ein Mal mit seinen geometrischen<br />
Angaben gespeichert wird. Da auf der anderen Seite Punkte und Linien unterschiedlichen<br />
Objekten zugeordnet sein können, müssen eventuell Linienteilungen<br />
durchgeführt werden und die unterschiedlichen Bedeutungen der geometrischen<br />
Elemente gespeichert werden.<br />
• Diese logische Strukturierung erfolgt in allen geographischen Informationssystemen<br />
in gleicher Art und Weise, nur die Bearbeitungsschritte unterscheiden sich dabei.<br />
• Das gleiche lässt sich für die graphische Bearbeitung aussagen, die sich bei den<br />
einzelnen Systemen wie SICAD, Geograph, CADDY usw. unterscheidet.<br />
Auch die Integration von geodätischen Berechnungen ist bei den einzelnen Systemen<br />
unterschiedlich gelöst.<br />
• Die Übernahme der Objektpunkte mit den zugehörigen Koordinaten erfolgt fast<br />
ausnahmslos im automatischen Datenfluss.<br />
Die Aufbereitung der Graphik erfolgt entweder über einen im Feld aufgenommenen<br />
Handriss oder über eine im Feld vorgenommene Verschlüsselung.<br />
3.5 Graphisch-interaktive Bearbeitung im Feld<br />
• Mit der Leistungsexplosion im Hardwarebereich ist die Software mittlerweile nicht<br />
nur stationär im Innendienst sondern auch auf einem Laptop im Feld einsetzbar.<br />
• Bei einer Kopplung des elektronischen Messsystems mit einer Hardware, die den<br />
Einsatz der Graphiksoftware erlaubt, ist die oben angegebene graphisch interaktive<br />
Bearbeitung bereits vor Ort möglich.<br />
Eine Bearbeitung dieser Art wird natürlich noch effektiver, wenn auf einem vorhandenen<br />
graphischen Datenbestand eine Fortführung im Feld durchgeführt wird.<br />
3.6 Einsatz RTK<br />
• Das Satellitenverfahren GPS lässt sich auch für die Aufnahme größerer Punktmengen<br />
wie bei der Geländeaufnahme einsetzen (siehe Vermessungskunde III).<br />
• Voraussetzung dabei ist, dass keine Signalabschattungen zwischen Empfänger und<br />
den Satelliten bestehen.<br />
Sichtverbindungen zwischen den Punkten und zur Basisstation brauchen nicht vorliegen.<br />
• Erreichbaren Genauigkeiten beim Einsatz von RTK:<br />
Lage → einige Zentimeter und<br />
Höhe → etwa der dreifache Wert der Lagestandardabweichung (wegen der<br />
ungünstigen Schnitte ausgehen)<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
3 MODERNE TACHYMETERAUFNAHME 28<br />
• Eingesetzt wird bei der Real Time Kinematik das differentielle GPS-Verfahren mit<br />
einer Basisstation (Base), zu der die relativen Koordinaten mit beweglichen GPS-<br />
Empfängern (Rover) bestimmt werden.<br />
DamitlassensichsehreffektivGeländeaufnahmen relativ zu einem Punkt, der<br />
lage- und höhenmäßig im Bearbeitungskoordinatensystem bekannt sein muss, bestimmen.<br />
• Instrumentarium des Rovers:<br />
– Antenne und Controller an einem Lotstab<br />
– sowie der restlichen Messeinrichtung meist in einem Rucksack<br />
• Zur relativen Positionsbestimmung sind die Daten als Korrektur- oder Beobachtungsdaten<br />
zwischen der Basisstation und dem Rover per Funk auszutauschen.<br />
Die Übertragungsrichtung ist davon abhängig an welcher Stelle die relativen Koordinaten<br />
ermittelt werden sollen. (Der Rover ist zusätzlich mit der notwendige<br />
Funkeinrichtung und den entsprechenden Auswerteinrichtungen (Programmen) zu<br />
versehen).<br />
• Beispiel eines Gerätesystems: Leica System 500<br />
Das Gerätesystem ist (auch) für den Einsatz mit SAPOS entwickelt worden (Einsatz<br />
z.B. in Brandenburg).<br />
Abbildung 11: Leica GPS-Gerätesystem 500<br />
Von links nach rechts: Smart-Gate (Datenübertragung), Bedieneinheit, GPS-Empfänger,<br />
Antenne, Gesamtansicht<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
4 DIGITALE GELÄNDEMODELLE (DGM) 29<br />
Abbildung 12: Leica GPS-Gerätesystem 500, Bedieneinheit<br />
In der Abbildung 12 sind im Display u.a.folgende Informationen ablesbar:<br />
- es handelt sich um Rover-Empfänger<br />
- Empfang von 7 Satelliten<br />
- Signal-Rausch-Verhältnis auf beiden Frequenzen<br />
- Datenempfang von Referenzstation ist OK<br />
- Zeit und restliche Batteriekapazität<br />
- 3-D-Koordinaten<br />
- Qualität der augenblicklichen Koordinaten- und Höhenbestimmung<br />
4 Digitale Geländemodelle (DGM)<br />
4.1 Allgemeines<br />
• Vielfach ist man heute dazu übergegangen, die Ergebnisse einer Geländeaufnahme<br />
nicht nur in analoger Form auszugeben sondern auch in digitaler Form als digitales<br />
Geländemodell abzuspeichern.<br />
• Der Sinn dieser Datenmodelle besteht einerseits darin die Fortführung zu vereinfachen<br />
und andererseits darin, diese Ergebnisse für vielfältige Zwecke weiterzuverarbeiten.<br />
• Im Zusammenhang mit topographischen Vermessungen kann man folglich das digitale<br />
Geländemodell als weitgehend unabhängigen Zahlenspeicher zur numerischen<br />
Beschreibung der Topographie auffassen.<br />
• Das DGM besteht aus dem digitalen Höhenmodell und dem digitalen Landschaftsmodell.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
4 DIGITALE GELÄNDEMODELLE (DGM) 30<br />
4.2 Digitales Höhenmodell<br />
• Als digitales Höhenmodell bezeichnet man die Menge der digital gespeicherten<br />
Höhenwerte, die als Funktion der Lage der Punkte, die Höhenstruktur des Geländes<br />
hinreichend genau repräsentieren.<br />
• Bei der Speicherung der Daten ist als zusätzliche Information aufzunehmen, in<br />
welcher Form die Daten vorliegen.<br />
Liegen nur die Messungsdaten vor, ist zu vermerken, in welcher Art die Vermessung<br />
(z. B. Rasteraufnahme oder Aufnahme des Geländeprtofils) erfolgt ist, und<br />
es ist eine Überarbeitung der Messungsdaten erforderlich.<br />
Liegen bereits abgeleitete Daten vor, so können diese direkt weiterverarbeitet werden.<br />
• Man nutzt dabei oft Polynome, die die Abhängigkeit der Höhe von den Lagekoordinaten<br />
wiedergeben. Die Bestimmung der Koeffizienten dieser Polynome erfolgt<br />
über die aufgenommenen dreidimensionalen Koordinaten und der Auflösung des<br />
zugehörigen Gleichungssystems nach der Methode der kleinsten Quadrate (Ausgleichungsrechnung).<br />
H(X, Y )=a00 + a10X + a01Y + a20X 2 + a22XY + a02Y 2 + ... (11)<br />
wobei H die Höhe, X und Y die Lagekoordinaten und aij die unbekannten Koeffizienten<br />
darstellen.<br />
4.3 Digitales Landschaftsmodell<br />
• Das digitale Landschaftsmodell umfasst die digitale Speicherung der als Grundriss<br />
bezeichneten Informationen.<br />
• Jedem Punkt wird als zusätzliche Information beigegeben, um welche Art von<br />
Punkt es sich handelt.<br />
Die Speicherung dieser Information wird sinnvollerweise in der Art durchgeführt,<br />
wie es bei geographischen Informationssystemen vorgenommen wird. Bei der ALK<br />
und auch bei ATKIS werden die Informationen objektweise gespeichert. Das bedeutet,<br />
dass dem Objekt die Information über die Art des Objektes beigegeben ist<br />
und die zugehörige Geometrie mit dem Objekt verknüpft wird.<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
5 TRIGONOMETRISCHE HÖHENMESSUNG 31<br />
5 Trigonometrische Höhenmessung<br />
(tlw. Wiederholung aus 2. Semester)<br />
5.1 Grundlagen/Prinzip<br />
P 1<br />
z<br />
s<br />
∆h = s cot z<br />
P 2<br />
H<br />
H 1<br />
P 1<br />
z 12<br />
• Ermittlung von Höhenunterschieden aus Entfernungen<br />
und Vertikalwinkeln<br />
• im Gegensatz zum geometrischen Nivellement erfolgt<br />
die Messung nicht aus der Mitte, sondern von<br />
einem Entpunkt des Höhenunterschiedes aus<br />
• die Einflüsse von Erdkrümmung und Refraktion (gekrümmter<br />
Lichtweg) sind daher unbedingt zu beachten<br />
/2<br />
/2<br />
P 2<br />
c R<br />
cE H2 - cE ist der Einfluss der Erdkrümmung auf die trigonometrische Höhenübertragung<br />
- cR ist der Einfluss des gekrümmten Lichtweges<br />
Einfluss der Erdkrümmung<br />
P1<br />
(/2<br />
R<br />
(<br />
M<br />
so<br />
s<br />
R<br />
P2<br />
100 -(<br />
CE s ≈ s0 sin γ<br />
2<br />
cE<br />
sin γ<br />
2<br />
H 1<br />
=<br />
cE · 2R<br />
s<br />
s<br />
sin(100 − γ)<br />
= s<br />
cos γ<br />
s<br />
cE =<br />
2<br />
2R cos γ<br />
Näherung für R: 6370 km<br />
≈ s2<br />
2R<br />
= s<br />
2R<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
5 TRIGONOMETRISCHE HÖHENMESSUNG 32<br />
Beispielwerte für den Einfluss der Erdkrümmung:<br />
s [km] 0.1 0.2 0.5 1 2 5 10<br />
cE 0.8mm 3.1mm 19.6mm 78.5mm 32cm 1.96m 7.9m<br />
Einfluss des gekrümmten Lichtweges (Refraktion)<br />
• die (optische) Dichte der Luft nimmt mit zunehmender Höhe ab<br />
dadurch kommt es zu einer kontinuierlichen Brechung des Zielstrahls<br />
• Der Einfluss des gekrümmten Lichtweges lässt sich analog berechnen, wenn der<br />
Lichtweg im Raum als Kreisbogen mit dem Radius r angenommen wird<br />
• Das Verhältnis der Radius der Lichtkurve zum Erdradius wird als Refraktionskoeffizient<br />
k bezeichnet<br />
k = R/r<br />
der Wert für k beträgt etwa k ≈ 0.125, dar ≈ 8R (für Zielungen außerhalb der<br />
bodennahen Luftschicht!)<br />
• der Refraktionskoeffizient kann stark variieren:<br />
– durch Variationen von Luftdruck und Temperatur entlang des Zielstrahls<br />
(vertikaler Temperaturgradient!)<br />
– in Bodennähe Beeinflussung durch verschiedene lokale Effekte<br />
schwer fassbare Reflektion/Absorbtion der Sonneneinstrahlung (Bewuchs,<br />
Asphalt/Beton, Wasserflächen, ...)<br />
– k ist örtlichen und zeitlichen Schwankungen unterworfen<br />
• Erfassung der Refraktionseinflüsse auf die Vertikalwinkelmessung ist sehr schwierig<br />
Korrektionen sind meist unsicher zu berechnen =⇒ Eleminierung durch Messungsanordnung<br />
und mit k = R/r r = R/k<br />
cR ≈− s2<br />
2r<br />
k · s2<br />
cR ≈−<br />
2R<br />
Beispielwerte für den Einfluss der Refraktion:<br />
(mit k =0.125)<br />
s [km] 0.1 0.2 0.5 1 5 10<br />
cE 0.1mm 0.4mm 2.5mm 9.8mm 24.5cm 0.981m<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
5 TRIGONOMETRISCHE HÖHENMESSUNG 33<br />
Damit lässt sich der Höhenunterschied zwischen den beiden Punkten P1 und P2 berechnen:<br />
∆h = H2 − H1 = s · cot z + iP1 − zP2 + s2 k · s2<br />
−<br />
2R 2R<br />
∆h = s · cot z + iP1 − zP2 +(1− k) s2<br />
2R<br />
(iP1 Instrumentenhöhe in P1, zP2 Zielpunkthöhe in P2)<br />
• Der Korrektionsterm für Erdkrümmung und Refraktion kann für kurze Zielweiten<br />
( 100m)<br />
=⇒ weniger Instrumentenstandpunkte bei großen Höhenunterschieden<br />
• günstig und effektiv beim Einsatz elektronischer Tachymeter<br />
• Anwendung z.B. bei Trassierung von Verkehrsanlagen, Passpunktbestimmungen,<br />
Polygonzügen<br />
s 21<br />
z 21 z23<br />
2<br />
2<br />
s 23<br />
z 32<br />
s 32<br />
3<br />
3<br />
z 34<br />
s 34<br />
Trigonometrisches Nivellement mit<br />
gegenseitiger Zenitwinkelmessung<br />
4<br />
4<br />
5<br />
5<br />
1<br />
1<br />
A<br />
B<br />
z21 z23<br />
s21 s23 2<br />
2<br />
3<br />
3<br />
s 43<br />
z 43<br />
4<br />
4<br />
z 45<br />
s 45<br />
Trigonometrisches Nivellement mit<br />
Sprungständen<br />
• Messung zwischen den Endpunkten einer Strecke zweimal (Hin- und Rückmessung),<br />
dadurch Eleminierung von Erdkrümmung und (zum Teil) Refraktion<br />
gegenseitige Zenitwinkelmessung!<br />
• oder Messung in Sprungständen<br />
gleiche Zielweiten zwischen den ” Vor-“ und ” Rückblicken“ auf einem Standpunkt<br />
erforderlich!<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)<br />
5<br />
5
5 TRIGONOMETRISCHE HÖHENMESSUNG 34<br />
kurzseitiges trigonometrisches Nivellement:<br />
- Zielweiten < 200m<br />
- Visuren meist parallel zur Erdoberfläche<br />
- Refraktionsfeld relativ homogen und bei Hin- und Rückmessung weitgehend konstant<br />
(kurzer zeitlicher Abstand!)<br />
⇒ Erdkrümmung und Refraktion beeinflussen Ergebnis kaum, auch bei Messung in<br />
Sprungständen<br />
langseitiges trigonometrisches Nivellement:<br />
- Zielweiten 200 bis 600 m<br />
-Abstände der Zielstrahlen zur Erdoberfläche variabel, variable Bodenverhältnisse<br />
- Refraktionsfeld inhomogen; durch Hin- und Rückmessung für jede Strecke weitgehend<br />
eleminierbar<br />
⇒ Erdkrümmung und Refraktion beeinflussen Ergebnis wenig; bei Messung in<br />
Sprungständen gleiche Zielweiten erforderlich<br />
◦ Bei sehr langen Zielweiten (> 1km) ist nicht nur gegenseitige sondern auch zeitgleiche<br />
Messung notwendig!<br />
Die Berechnung der Höhenunterschiede erfolgt nach der bereits bekannten Formel (einschließlich<br />
der Glieder zur Berücksichtigung von Erdkrümmung und Refraktion):<br />
bzw. für steile Zielungen:<br />
∆h = H2 − H1 = s · cot z +(1− k) s2<br />
2R + hi − hz<br />
∆h = H2 − H1 = s · cot z +(1− k s2<br />
)<br />
sin z 2R + hi − hz<br />
mit: hi Instrumentenhöhe<br />
hz Zieltafel- bzw. Reflektorhöhe<br />
5.3 Trigonometrische Höhenübertragung über große Distanzen<br />
• bei den nachfolgenden Betrachtungen wird die Erde als Kugel angenommen (mittlerer<br />
Radius 6371 km)<br />
in den meisten Fällen ist diese Näherung ausreichend<br />
• für genauere Annäherungen an die tatsächliche Erdfigur können andere (zusätzliche)<br />
Annahmen getroffen werden (ellipsoidische Gestalt, Geometrie des Geoides)<br />
⇒ siehe Vorlesung Landesvermessung (7. Semester)<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
5 TRIGONOMETRISCHE HÖHENMESSUNG 35<br />
5.3.1 Höhenunterschiede aus einseitig beobachteten Zenitdistanzen<br />
Für genauere Bestimmungen bei großen Höhenunterschieden wird die horizontale Entfernung<br />
auf die mittlere Höhe Hm reduziert.<br />
es ergibt sich:<br />
Hm = H1 + H2<br />
2<br />
∆h = H2 − H1 = s(1 + Hm<br />
k s2<br />
) · cot z +(1− )<br />
R sin z 2R + hi − hz<br />
Wenn s nicht gemessen sondern aus Koordinaten der Endpunkte eines Höhenunterschiedes<br />
gerechnet wird, ist zusätzlich die Projektionsverzerrung des Koordinatensystems zu<br />
berücksichtigen.<br />
5.3.2 Höhenunterschiede aus gegenseitig beobachteten Zenitdistanzen<br />
Bei gegenseitig gleichzeitig beobachteten Zenitdistanzen ergibt sich entsprechend:<br />
∆h = H2 − H1 = s(1 + Hm<br />
R ) · tan(z21 − z12<br />
2<br />
und mit hi1 = hz1 und hi1 = hz1:<br />
)+ hi1 + hz1 − hz2 − hi2<br />
2<br />
∆h = H2 − H1 = s(1 + Hm<br />
R ) · tan(z21 − z12<br />
)+hi1 − hz2<br />
2<br />
5.3.3 Fehlerbetrachtung zur Höhenübertragung über große Distanzen<br />
Einseitige Zenitwinkelmessung:<br />
s 2 ∆h =<br />
�<br />
(1 + Hm<br />
�2 k · s<br />
)cotz− s<br />
R R sin z<br />
2 s +<br />
�<br />
Hm<br />
s(1 + R − )<br />
sin 2 �2 ∆h · k · s<br />
+ s<br />
z sin z · 2R<br />
2 z +<br />
�<br />
s<br />
−<br />
2<br />
�2<br />
s<br />
sin z · 2R<br />
2 k +s2hi +s2hz Gegenseitige Zenitwinkelmessung:<br />
s 2 ∆h =<br />
�<br />
(1 + Hm<br />
R )tan(z21 �2 − z12<br />
) s<br />
2<br />
2 s +<br />
�<br />
Hm (1 + R )<br />
2cos2 ( z21−z12<br />
�2 s<br />
2 )<br />
2 z21 +<br />
�<br />
Hm<br />
(1 + R − )<br />
2cos2 ( z21−z12<br />
�2 s<br />
2 )<br />
2 z12 +s2hi1 +s2hz2 - die Fehler der mittleren Höhe und des Erdradius können i.d.R. vernachlässigt werden<br />
- bei Zenitdistanzen ≈ 100gon geht der Einfluss des Streckenfehlers stark zurück<br />
(bei z ≈ 97gon geht ss nur noch mit ca. 5% in das Ergebnis für ∆h ein)<br />
- Strecken können aus Koordinaten gerechnet werden (wenn Messung schwierig)<br />
- die Strecken können auch aus Zenitdistanzmessungen zu einem vertikalen Maßstab<br />
abgeleitet werden:<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
5 TRIGONOMETRISCHE HÖHENMESSUNG 36<br />
z u<br />
z o<br />
s<br />
Streckenmessung aus Ablesungen an<br />
vertikaler Latte<br />
5.4 Bestimmung der Refraktion<br />
z1<br />
R<br />
11<br />
z1<br />
r<br />
s'<br />
s<br />
z2<br />
z2<br />
2<br />
R<br />
l<br />
h<br />
o<br />
u<br />
r<br />
l + h = s · cot zo<br />
=⇒ s =<br />
l<br />
cot zo − cot zu<br />
h = s · cot zu<br />
=<br />
o − u<br />
cot zo − cot zu<br />
Aus gegenseitigen Zenitwinkelmessungen kann<br />
auch der Refraktionskoeffizient bestimmt werden:<br />
z1 +∆z1 + β1 = 200gon<br />
z2 +∆z2 + β2 = 200gon<br />
β1 + β2 + γ = 200gon<br />
z1 +∆z1 + z2 +∆z2 = 200gon + γ<br />
∆z1 =∆z2 =∆z = 1<br />
2 δ<br />
γ = s<br />
R<br />
k = R<br />
r<br />
z1 + z2 +2∆z = 200gon + γ<br />
z1 + z2 + s<br />
s<br />
k = 200gon +<br />
R R<br />
z1 + z2 − 200gon = s<br />
(1 − k)<br />
R<br />
k =1− (z1 + z2 − 200gon) R<br />
s<br />
δ = s′<br />
r<br />
∆z = s′<br />
2r<br />
r = R<br />
k<br />
∆z = s′ s<br />
k ≈<br />
2R 2R k<br />
Nach dem Varianzfortpflanzungsgesetz erhält man für die Standardabweichung sk:<br />
s 2 k =<br />
� �2<br />
R<br />
s<br />
s<br />
2 z1 +<br />
� �2<br />
R<br />
s<br />
s<br />
2 z2 +<br />
�<br />
(z1 + z2 − 200gon) R<br />
s2 �2<br />
s 2 s<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)
5 TRIGONOMETRISCHE HÖHENMESSUNG 37<br />
Beispiel:<br />
gegeben: s = 1578.12m ±20mm<br />
z1 =98.8638gon ±2mgon z2 = 101.1510gon ±2mgon<br />
H1 =35.623m ±2mm<br />
gesucht: H2 ≈ 64m, sH2, k, sk<br />
Ergebnis: ∆h =28.352m ±35.0mm<br />
H2 =63.975m ±35.1mm<br />
k =0.062 ±0.179<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)