VERMESSUNGSKUNDE IV
VERMESSUNGSKUNDE IV
VERMESSUNGSKUNDE IV

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3 MODERNE TACHYMETERAUFNAHME 28<br />
• Eingesetzt wird bei der Real Time Kinematik das differentielle GPS-Verfahren mit<br />
einer Basisstation (Base), zu der die relativen Koordinaten mit beweglichen GPS-<br />
Empfängern (Rover) bestimmt werden.<br />
DamitlassensichsehreffektivGeländeaufnahmen relativ zu einem Punkt, der<br />
lage- und höhenmäßig im Bearbeitungskoordinatensystem bekannt sein muss, bestimmen.<br />
• Instrumentarium des Rovers:<br />
– Antenne und Controller an einem Lotstab<br />
– sowie der restlichen Messeinrichtung meist in einem Rucksack<br />
• Zur relativen Positionsbestimmung sind die Daten als Korrektur- oder Beobachtungsdaten<br />
zwischen der Basisstation und dem Rover per Funk auszutauschen.<br />
Die Übertragungsrichtung ist davon abhängig an welcher Stelle die relativen Koordinaten<br />
ermittelt werden sollen. (Der Rover ist zusätzlich mit der notwendige<br />
Funkeinrichtung und den entsprechenden Auswerteinrichtungen (Programmen) zu<br />
versehen).<br />
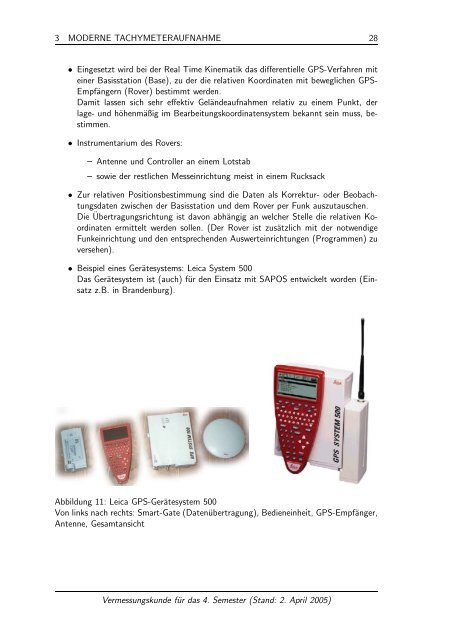
• Beispiel eines Gerätesystems: Leica System 500<br />
Das Gerätesystem ist (auch) für den Einsatz mit SAPOS entwickelt worden (Einsatz<br />
z.B. in Brandenburg).<br />
Abbildung 11: Leica GPS-Gerätesystem 500<br />
Von links nach rechts: Smart-Gate (Datenübertragung), Bedieneinheit, GPS-Empfänger,<br />
Antenne, Gesamtansicht<br />
Vermessungskunde für das 4. Semester (Stand: 2. April 2005)