Kinematisches GPS zur Deformationsbestimmung - Beuth ...
Kinematisches GPS zur Deformationsbestimmung - Beuth ...
Kinematisches GPS zur Deformationsbestimmung - Beuth ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Techn. Fachhochschule Berlin<br />
Fachbereich Bauingenieur- und Geoinformationswesen<br />
Diplomarbeit<br />
im Studiengang Vermessungswesen<br />
Thema:<br />
Nutzung von kinematischem <strong>GPS</strong> <strong>zur</strong> <strong>Deformationsbestimmung</strong><br />
eingereicht von:<br />
Stefan Knoblach <br />
eingereicht am: 18. Juli 2005<br />
Betreuer:<br />
Herr Prof. Dr. W. Korth
Dank<br />
Ich möchte allen danken, die zum Gelingen dieser Arbeit beigetragen haben.<br />
Insbesondere jedoch meinem Betreuer Herrn Prof. Dr. W. Korth für seine große<br />
Unterstützung und hilfreichen Anregungen und dafür, dass er sich selbst in<br />
hektischen Momenten immer die nötige Zeit für meine Arbeit nahm.<br />
Herrn Prof. Dr. K. Hehl, der nicht selten den Ehrgeiz in mir weckte und für meine<br />
Fragen immer ein offenes Ohr hatte.<br />
Frau Dipl. Ing. U. Rübens, die bei technischen Problemen immer einen Rat wusste.<br />
Und Frau Birgit Wildfeuer für ihr großes Engagement bei der Korrektur.<br />
Darüber hinaus möchte ich besonders meinen Eltern, Großeltern und Freunden<br />
danken, ohne deren Unterstützung dies alles sicherlich nicht möglich geworden<br />
wäre.<br />
Der größte Dank gilt jedoch meiner Freundin für ihre Geduld.<br />
Von den Landesvermessungsbehörden Brandenburg und Niedersachsen wurden der<br />
TFH Berlin die <strong>zur</strong> Auswertung benötigten Beobachtungsdaten freundlicherweise<br />
kostenfrei überlassen.<br />
II
Inhaltsverzeichnis<br />
1 Einführung 1<br />
1.1 Globale Zusammenhänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1<br />
1.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1<br />
1.3 Grönland Expedition 2002 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2<br />
2 Grundlagen 4<br />
2.1 <strong>GPS</strong> - Ein kurzer Überblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4<br />
2.2 Bezugssysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5<br />
2.2.1 Räumliche Bezugssysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5<br />
2.2.2 Zeitliche Bezugssysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
2.3 Satellitenbahnen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
2.3.1 Almanach Daten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
2.3.2 Broadcast Ephemeriden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9<br />
2.3.3 Präzise Ephemeriden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9<br />
2.4 <strong>GPS</strong>-Signale, Datencodierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9<br />
2.5 Signalausbreitung in der Erdatmosphäre . . . . . . . . . . . . . . . . . . . . . . . . 11<br />
2.5.1 Ionosphärische Refraktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12<br />
2.5.2 Troposphärische Refraktion . . . . . . . . . . . . . . . . . . . . . . . . . . . 13<br />
2.5.3 Mehrwegeausbreitung (Multipath) . . . . . . . . . . . . . . . . . . . . . . . 14<br />
2.5.4 Signalbeugung (Signal Diffraction) . . . . . . . . . . . . . . . . . . . . . . . 15<br />
2.5.5 Behandlung von Phasensprüngen (Cycle Slips) . . . . . . . . . . . . . . . . . 15<br />
2.6 Einflüsse der Empfangseinheit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
2.6.1 Variationen des Antennenphasenzentrums . . . . . . . . . . . . . . . . . . . 17<br />
2.6.2 Empfängerfehler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
2.7 Beobachtungsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18<br />
2.7.1 Pseudorange- oder Code-Messungen . . . . . . . . . . . . . . . . . . . . . . 18<br />
III
2.7.2 Phasenmessung (Carrier Phase) . . . . . . . . . . . . . . . . . . . . . . . . 20<br />
2.7.3 Verbessertes Modell für die Phasenbeobachtungen . . . . . . . . . . . . . . . 21<br />
2.8 Differenzbildung und Linearkombination . . . . . . . . . . . . . . . . . . . . . . . . 22<br />
2.8.1 Differenzbildung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22<br />
2.8.2 Linearkombination . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24<br />
2.9 Festlegung des Mehrdeutigkeitsparameters der Trägerphase . . . . . . . . . . . . . . 25<br />
2.9.1 Code- und Trägerphasenkombination . . . . . . . . . . . . . . . . . . . . . . 26<br />
2.9.2 Geometrische Methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26<br />
2.9.3 Suchalgorithmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26<br />
2.9.4 Mehrdeutigkeitslösung on the fly“ . . . . . . . . . . . . . . . . . . . . . . . ”<br />
27<br />
2.10 <strong>GPS</strong>-Messverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27<br />
2.10.1 Navigation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27<br />
2.10.2 Vermessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28<br />
2.11 Virtuelle Referenzstation (VRS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31<br />
2.12 Alternative Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33<br />
3 Besonderheiten des Projekts - Grundlegende Festlegungen 34<br />
3.1 Örtliche Gegebenheiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34<br />
3.1.1 Eisbewegungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34<br />
3.1.2 Atmosphärische Einflüsse . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35<br />
3.1.3 Abschattung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36<br />
3.1.4 Mehrwegeausbreitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37<br />
3.1.5 Deklination . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37<br />
3.2 Messkonstellation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38<br />
3.2.1 Lange Basislinien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38<br />
3.2.2 Basisstationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38<br />
3.2.3 Satellitenkonstellation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38<br />
3.2.4 Aufzeichnungsrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39<br />
3.3 Auswertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40<br />
3.3.1 Beobachtungsdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40<br />
3.3.2 Auswerteprogramme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40<br />
3.3.3 Präzise Bahndaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40<br />
IV
4 Auswertung der Grönlanddaten 41<br />
4.1 Kinematische Auswertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41<br />
4.2 Auswertung mit VRS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42<br />
4.3 Auswertung in kurzen Zeitfenstern (Pseudokinematik) . . . . . . . . . . . . . . . . . 42<br />
4.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50<br />
5 Planung und Durchführung der Simulation 52<br />
5.1 Messungsaufbau und Konfiguration . . . . . . . . . . . . . . . . . . . . . . . . . . . 52<br />
5.2 Messungsdurchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53<br />
6 Auswertung der Simulation 55<br />
6.1 Grundlegendes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55<br />
6.1.1 Basisstationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55<br />
6.1.2 Auswertesoftware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56<br />
6.2 Auswertung in kurzen Zeitfenstern (Pseudokinematik) . . . . . . . . . . . . . . . . . 56<br />
6.3 Bewertung der Ergbnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58<br />
6.3.1 Innere Genauigkeit der Bewegungsgröße . . . . . . . . . . . . . . . . . . . . 58<br />
6.3.2 Äußere Genauigkeit der Bewegungsgröße . . . . . . . . . . . . . . . . . . . . 60<br />
6.3.3 Verbesserte Betrachtung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62<br />
6.3.4 Genauigkeit der Richtungsbestimmung . . . . . . . . . . . . . . . . . . . . . 62<br />
7 Zusammenfassung und Schlussfolgerung 63<br />
A Berechnungsergebnisse 65<br />
B ReadMe zu ”<br />
Nansen“ 69<br />
V
Abbildungsverzeichnis<br />
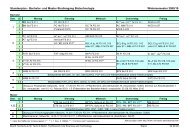
1.1 Route der Grönlanddurchquerung 2002 . . . . . . . . . . . . . . . . . . . . . . . . . 2<br />
2.1 Dreidimensional geozentrisch kartesisches Koordinatensystem . . . . . . . . . . . . . 6<br />
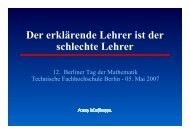
2.2 Zeitsysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
2.3 Phasenmodulation des Trägersignals mit einer Binärsequenz . . . . . . . . . . . . . 10<br />
2.4 Schema der Signal- und Frequenzerzeugung im <strong>GPS</strong>-Satelliten . . . . . . . . . . . . 11<br />
2.5 Mehrwegeausbreitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
2.6 Signalbeugung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
2.7 Graphische Darstellung von Phasensprüngen . . . . . . . . . . . . . . . . . . . . . . 16<br />
2.8 Pseudorange-Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18<br />
2.9 Single Difference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23<br />
2.10 Empfänger-Satelliten-Doppeldifferenz (Double Difference) . . . . . . . . . . . . . . . 23<br />
2.11 Dreifachdifferenz (Triple Difference) . . . . . . . . . . . . . . . . . . . . . . . . . . 24<br />
2.12 Übersicht der <strong>GPS</strong> Messverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28<br />
2.13 Fehlermodellierung durch lineare Interpolation . . . . . . . . . . . . . . . . . . . . . 32<br />
2.14 Berechnung der Beobachtungen einer Virtuellen Referenzstation . . . . . . . . . . . 32<br />
3.1 Sonneaktivität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36<br />
3.2 Projektplan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38<br />
4.1 Zerlegen des gesamten Aufnahmezeitraums in kurze Zeitfenster . . . . . . . . . . . . 43<br />
4.2 Darstellung einer geradlinigen Bewegung . . . . . . . . . . . . . . . . . . . . . . . . 45<br />
4.3 Bestimmung der Bewegungsgröße mit Hilfe ausgleichender Geraden . . . . . . . . . 47<br />
4.4 Suchfenster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49<br />
5.1 Messanordnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53<br />
5.2 Durchführung der Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54<br />
6.1 Kleinste erfassbare Bewegung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59<br />
6.2 Abhängigkeit der inneren Genauigkeit von der Größe des Intervalls . . . . . . . . . . 60<br />
VI
Tabellenverzeichnis<br />
2.1 Übersicht der Orbitdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
2.2 PRN Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10<br />
3.1 Magnetische Deklination - Sommer 2006 . . . . . . . . . . . . . . . . . . . . . . . . 37<br />
3.2 Referenzstationen der Grönlandexpedition 2002 . . . . . . . . . . . . . . . . . . . . 39<br />
3.3 Beobachtungen in den einzelnen Camps . . . . . . . . . . . . . . . . . . . . . . . . 40<br />
4.1 Ermittelte Richtung und Eisbewegung . . . . . . . . . . . . . . . . . . . . . . . . . 48<br />
4.2 Voraussichtliche Positionsänderungen bis Sommer 2006 . . . . . . . . . . . . . . . . 50<br />
5.1 Übersicht der gesammelten Beobachtungen . . . . . . . . . . . . . . . . . . . . . . 54<br />
6.1 Verwendete SAPOS Stationen des Landes Brandenburg . . . . . . . . . . . . . . . . 55<br />
6.2 Verwendete SAPOS Stationen des Landes Niedersachsen . . . . . . . . . . . . . . . 55<br />
6.3 Größe des Intervalls und mittlerer Fehler der Bewegung . . . . . . . . . . . . . . . . 59<br />
6.4 Äußere Genauigkeit im Verhältnis <strong>zur</strong> Entfernung . . . . . . . . . . . . . . . . . . . 61<br />
6.5 Größe des Intervalls und wahre Abweichung . . . . . . . . . . . . . . . . . . . . . . 61<br />
6.6 Wahre Abweichung als relativer Wert . . . . . . . . . . . . . . . . . . . . . . . . . . 61<br />
6.7 Genauigkeit der Richtungsbestimmung . . . . . . . . . . . . . . . . . . . . . . . . . 62<br />
A.1 Vorraussichtliche Positionen 2006 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65<br />
A.2 Auswertungsergebnisse der Simulationsdaten . . . . . . . . . . . . . . . . . . . . . . 67<br />
VII
Kapitel 1<br />
Einführung<br />
1.1 Globale Zusammenhänge<br />
Grönland, der Name entstammt dem Isländischen und bedeutet soviel wie ”<br />
Grünland“. Die ersten<br />
Seefahrer, welche zum Ende des ersten Jahrtausends die grün bewachsenen südlichen Küsten der<br />
Insel erreichten, gaben ihr diesen Namen. Sie erwarteten auch auf dem restlichen Teil der Insel<br />
grüne und fruchtbare Auen zu finden, aber ihre Zuversicht wurde herb enttäuscht. Insgesamt 90 %<br />
der Oberfläche Grönlands ist mit einer teilweise bis zu drei Kilometer dicken Eisschicht bedeckt,<br />
welche etwa 9 % des gesamten Süßwasservorkommens der Erde speichert. Diese entstand über einen<br />
Zeitraum von einigen zehntausend Jahren und stellt eines der größten Klimaarchive der Erde dar.<br />
Das Klima der Erde befindet sich niemals in Ruhe, unentwegt wechseln sich wärmere mit kälteren<br />
Perioden ab. Die Einflüsse des Menschen auf die aktuelle Klimaveränderung sind bislang nur zu einem<br />
kleinen Teil entschlüsselt. Mit Klimamodellen wird versucht die Veränderungen der Vergangenheit<br />
nachzuvollziehen und Aussagen über die Zukunft zu treffen. Klimamodelle können aber auch immer<br />
nur so gut sein wie die Menge an Größen die sie berücksichtigen. Ungebrochen ist daher die Zahl der<br />
Unternehmungen, deren Ziel es ist immer neue Daten zu gewinnen und so die Modellvorstellung der<br />
komplexen Realität anzunähern.<br />
Die Veränderungen in den Polarregionen, die Zu- und Abnahme der Eismengen und ihre Bewegung,<br />
stellt einen der wichtigsten Indikatoren der globalen klimatischen Zusammenhänge dar. Dies ist unter<br />
anderem ein Grund dafür, dass Veränderungen gerade in diesen Gebieten genau beobachtet werden.<br />
1.2 Motivation<br />
Die Bestimmung von Eisbewegungen ist eine der zentralen Aufgaben für geodätische<br />
”<br />
Arbeiten in Polarregionen. Eisbewegungsparameter stellen eine wichtige Komponente für<br />
Massenhaushaltsuntersuchungen dar.“ 1<br />
Gängige Methode <strong>zur</strong> geodätischen Bestimmung von vermarkten Punkten auf der Eisoberfläche war<br />
und ist die Wiederholungsmessung. In der Vergangenheit wurden solche Vermessungen häufig mit<br />
Methoden der klassischen Polygonierung durchgeführt, nicht selten auch getrennt nach Lage- und<br />
Höhenbestimmung. Auf Grund der geringen zu erwartenden Bewegungen kann in Gebieten, in denen<br />
1 [Korth, 1998], S. 30<br />
1
66°<br />
nicht mit saisonalen Schwankungen zu rechnen ist, unter Umständen ein beträchtlicher Abstand<br />
zwischen zwei aufeinander folgenden Messungen liegen.<br />
Durch den Einsatz von <strong>GPS</strong> ist es möglich schon nach wenigen Tagen zuverlässige Daten über die<br />
Oberflächenbewegungen zu gewinnen, bei einer erheblichen Reduzierung des logistischen Aufwands.<br />
Durch die Verwendung von kinematischem <strong>GPS</strong> können solche Daten mitunter schon nach wenigen<br />
Stunden vorliegen. Auch ist dadurch eine höhere Auflösung und somit eine Erfassung von saisonalen<br />
bis hin zu tageszeitlichen Schwankungen der Bewegungsgrößen möglich.<br />
In jüngster Zeit kommen immer mehr Fernerkundungsverfahren zum Einsatz, mit denen es möglich<br />
ist die gesamte Geometrie eines Gletschers zu erfassen. Diese Verfahren weisen eine hohe Effektivität<br />
auf und sind auch bei großen Gebieten einsetzbar. Als Beispiel sind hier die europäischen Fernerkundungssatelliten<br />
ERS1 und ERS2 zu nennen. 2<br />
Zur Auswertung dieser Daten sind jedoch am Boden gewonnene Kontrollwerte unbedingt erforderlich.<br />
Solche Kontrollwerte sind unter anderem Eishöhen, Oberflächenstrukturen und Fließgeschwindigkeiten.<br />
Diese Diplomarbeit soll die Möglichkeiten und Grenzen aufzeigen, die in der Verwendung von kinematischem<br />
<strong>GPS</strong> <strong>zur</strong> Bestimmung der Oberflächenbewegungen von Gletschern liegen. Zu diesem<br />
Zweck soll auch nach einer möglichst günstigen Konstellation <strong>zur</strong> Umsetzung des Vorhabens gesucht<br />
werden.<br />
[Korth, 1998]<br />
1.3 Grönland Expedition 2002<br />
Im Sommer 2002 machten sich vier Wissenschaftler auf, die ca. 700 km lange Strecke zwischen<br />
Ammassalik an der Ostküste und Ilulissat an der Westküste zu Fuß <strong>zur</strong>ückzulegen.<br />
312°<br />
70°<br />
318°<br />
68°<br />
324°<br />
70°<br />
306°<br />
Port Victor<br />
Ilulissat<br />
LAUFR<br />
ICHTUNG<br />
Ammassalik<br />
Isortoq<br />
324°<br />
68°<br />
306°<br />
0 100 200 300<br />
312°<br />
km<br />
66°<br />
318°<br />
64° 64°<br />
Abbildung 1.1: Route der Grönlanddurchquerung 2002 (Korth)<br />
Die Expedition sollte einen aktuellen Beitrag <strong>zur</strong> Klimaforschung leisten. Ziel war es Daten aus<br />
bodengebunden Messungen <strong>zur</strong> Validierung bzw. Kalibrierung für Verfahren der Geofernerkundung<br />
2 http://www.caf.dlr.de/caf/satellitendaten/missionen/ers, Juni 2005<br />
2
zu liefern. Im Rahmen des geplanten Vorhabens sollte entlang eines Querprofils in einem Bereich des<br />
grönländischen Inlandeises, für den bisher noch keine solchen Daten vorlagen, sogenannte ”<br />
Ground<br />
Truth Daten“ gewonnen werden.<br />
Die Messungen wurden mit differentiellem <strong>GPS</strong> durchgeführt. Als Referenz dienten drei Stationen an<br />
der Küste Grönlands, Kulusuk und Kellyville im Osten und Kangerlussuaq im Westen.<br />
Kulusuk ist eine permanente Referenzstation der UNAVCO 3 (University NAVSTAR Consortium),<br />
welche als internationale Organisation aus einem Zusammenschluss von etwa hundert Universitäten<br />
und Forschungsinstituten besteht. Die Daten wurden über den gesamten Zeitraum der Expedition<br />
für die Auswertung <strong>zur</strong> Verfügung gestellt.<br />
Kangerlussuaq ist ein von der TU Dresden zum Zwecke mehrerer Expeditionen vermarkter Punkt<br />
mit Zwangszentrierung, der ebenfalls während des gesamten Zeitraums der Expedition beobachtet<br />
wurde.<br />
Die IGS Station Kellyville befindet an der Westküste Grönlands nur zirka 10 Kilometer westlich des<br />
Punktes Kangerlussuaq. Sie ist Teil des Sondrestrom Research Facility 4 (SRI), einer von den U.S.<br />
Amerikanern betriebenen Forschungseinrichtung <strong>zur</strong> Untersuchung der polaren Atmosphäre. Wie von<br />
allen anderen IGS Stationen auch, stehen die Beobachtungsdaten und Stationskoordinaten im Internet<br />
zum Download 5 bereit.<br />
In den Camps, die auf dem grönländischen Inlandeis lagen (Camp 5 bis 36), wurde jeweils ein Punkt<br />
magnetisch vermarkt. Diese Punkte wurden über Nacht, gegen null Uhr <strong>GPS</strong>-Zeit, bis zum späten<br />
Nachmittag beobachtet. Zur Auswertung stehen somit pro Punkt Daten für einen Zeitraum von etwa<br />
zehn Stunden <strong>zur</strong> Verfügung. Die magnetische Vermarkung diente dem Zwecke, die Punkte bei einer<br />
etwaigen Folgeexpedition nochmals aufzusuchen und zu beobachten um damit weitere Aussagen über<br />
die Eisbewegung treffen zu können.<br />
Weitere Informationen sind auf der Internetseite der Expedition 6 zu finden.<br />
[Burandt, 2003, Korth, 1998]<br />
3 http://www.unavco.org, Mai 2005<br />
4 http://isr.sri.com, Juni 2005<br />
5 http://igscb.jpl.nasa.gov/components/data.html, Juni 2005<br />
6 http://www.groenlanddurchquerung.de, Juni 2005<br />
3
Kapitel 2<br />
Grundlagen<br />
2.1 <strong>GPS</strong> - Ein kurzer Überblick<br />
1960 leitete die U.S. Navy eine neue Ära der Navigationstechnologie mit dem Satelliten Navigationssystem<br />
TRANSIT ein, welches vom Applied Physics Laboratory (APL) der John Hopkins University in<br />
Maryland entwickelt wurde. In den folgenden Jahren wurde eine Reihe weiterer Programme gestartet<br />
(621B und TIMATION), welche schließlich der Schlüssel <strong>zur</strong> Entwicklung und Installation des Global<br />
Positioning System (<strong>GPS</strong>) waren.<br />
1973 führte eine Anzahl von Veränderungen im U.S. Department of Defense (DoD) zu einer Reform<br />
des Entwicklungsprozesses. Programme <strong>zur</strong> Zusammenarbeit der einzelnen Teilstreitkräfte wurden<br />
ins Leben gerufen. Dies war die Geburtsstunde von <strong>GPS</strong>.<br />
Die Forderungen an das neue System waren klar: Ein <strong>GPS</strong>-Benutzer soll jederzeit (wetterunabhängig)<br />
und überall (auf oder nahe der Erde, ob in Ruhe oder in Bewegung) seine 3-dimensionale Position,<br />
seine Geschwindigkeit und den Zeitpunkt mit extremer Genauigkeit bestimmen können.<br />
Der erste funktionstüchtige Prototyp eines <strong>GPS</strong>-Satelliten wurde im Februar 1978 in den Orbit gestartet.<br />
Zu dieser Zeit war auch schon das Boden Kontrollsegment einsatzbereit. Dieses besteht aus<br />
einer Master Control Station auf der Falcon Air Force Basis in Colorado Springs und vier Monitor<br />
Stations auf Hawaii, Diego Garcia, Kwajalein und Ascension Island. Seit 1978 konnten insgesamt<br />
44 <strong>GPS</strong>-Satelliten erfolgreich in den Orbit gebracht werden. Diese repräsentieren zwei Generationen<br />
von ”<br />
Blöcken“, die von 1978 bis 1995 eingesetzten Block I Satelliten und die ab 1989 erstmals gestarteten<br />
Satelliten der neueren Generationen II, IIA und IIR. Obwohl es auf Grund von Ausfällen<br />
einige Verzögerungen gab, wurde das System nach und nach voll ausgebaut. Mitte 1995 gaben die<br />
amerikanischen Streitkräfte die volle Operationsfähigkeit des Global Positioning System bekannt.<br />
In seinem operationellen Zustand besteht das System aus 24 Satelliten (21 Satelliten plus 3 aktive<br />
Reservesatelliten), welche die Erde in einer Höhe von 26560 km relativ zu ihrem Geozentrum umlaufen.<br />
Dieser Radius führt genau zu zwei Umläufen an einem Sternentag. In dieser Zeit dreht sich<br />
die Erde exakt einmal um 360 ◦ . Nach zwei Umrundungen nehmen die Satelliten also immer wieder<br />
die gleiche Position relativ zum Erdkörper ein. Da ein Sternentag aber 4 Minuten kürzer ist als ein<br />
Sonnentag, erscheinen sie jeden Tag um je 4 Minuten früher über dem Beobachter. Die Satelliten<br />
sind gleichmäßig in 6 Bahnebenen verteilt, die Bahnneigung beträgt dabei jeweils 55 ◦ relativ zum<br />
Äquator. Die Idee hinter dieser Konstellation ist: mindestens 4 Satelliten sollen zu jeder Zeit von<br />
jedem Ort der Erde aus sichtbar sein.<br />
Das Prinzip der absoluten Positionierung und Navigation mit <strong>GPS</strong> beruht darauf, dass der <strong>GPS</strong>-<br />
Empfänger gleichzeitig die Signale mehrerer Satelliten empfängt. Mit Hilfe dieser Signale kann<br />
4
die Entfernung zwischen <strong>GPS</strong>-Satellit und <strong>GPS</strong>-Empfänger bestimmt werden. Unter Verwendung<br />
der ebenfalls vom Satelliten übersendeten Satellitenpositionen (Broadcast Bahninformationen) kann<br />
durch einen 3-dimensionalen Bogenschlag die momentane Position des Nutzers mit einer Genauigkeit<br />
von ein paar Metern bestimmt werden. Minimale Voraussetzung ist der gleichzeitige Empfang der<br />
Signale von mindestens vier Satelliten um alle Unbekannten zu bestimmen, die <strong>zur</strong> Positionierung<br />
notwendig sind.<br />
Das <strong>GPS</strong>-Signal wird auf zwei Frequenzen ausgesendet: ein primäres Signal auf 1575,42 MHz (L 1 -<br />
Band) und ein sekundäres Signal auf 1227,6 MHz (L 2 -Band). Diese Signale werden simultan generiert,<br />
so dass der Nutzer, welcher beide Signale empfängt, daraus direkt eine Korrektur des durch die<br />
Ionosphäre bedingten Fehlers ableiten kann. Zwei Modulationen werden übertragen: der Clear Acquisition<br />
(C/A-) Code auf L 1 und der Precise (P-) Code auf L 1 und L 2 . Diese Modulation eröffnet den<br />
Zugang zum Standard-Positionierungs-Service (Standard Positioning Service, SPS) über den C/A-<br />
Code und zum Präzisen-Positionierungs-Service (Precise Positioning Service, PPS) über den P-Code.<br />
Der PPS ist verschlüsselt und nur autorisierten Nutzern zugänglich (Anti-Spoofing, A-S). Die Genauigkeit<br />
des SPS, welcher allen Nutzern offen steht, kann durch den Systembetreiber eingeschränkt<br />
werden. Diese Einschränkung wird als Selective Availability (SA) bezeichnet.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001, Rothacher, 2004, Seeber, 1989, Tiemeyer, 2001]<br />
2.2 Bezugssysteme<br />
2.2.1 Räumliche Bezugssysteme<br />
Im Zusammenhang mit <strong>GPS</strong> gibt es eine Vielzahl verschiedener Bezugssysteme, die <strong>zur</strong> Bestimmung<br />
der Lage der einzelnen Systemkomponenten dienen und durch Transformation ineinander überführt<br />
werden können.<br />
Man unterscheidet drei Klassen von Bezugssystemen:<br />
• Raumfeste Bezugssysteme (Inertialsysteme): fest bezüglich der Richtung zu Sternen<br />
• Erdfeste Bezugssysteme: fest verbunden mit der Erdkugel, mit dieser rotierend<br />
• Lokale Bezugssysteme (Horizontsysteme): fest verbunden mit Beobachtungsort<br />
Hier soll nur auf die für den Endnutzer wichtigsten erdfesten globalen Referenzsysteme eingegangen<br />
werden.<br />
Mit dem Einzug der Satellitenvermessung und anderer Raumtechniken konnten weltweit definierte<br />
globale geodätische Referenzsysteme geschaffen werden. Das dabei benutzte dreidimensionale,<br />
geozentrische kartesische Koordinatensystem ist wie folgt definiert (s. Abb. 2.1)<br />
1. Koordinatenursprung: Massenmittelpunkt der Erde (Geozentrum)<br />
2. Z-Achse: Drehachse der Erde<br />
3. XZ-Ebene: Definiert durch die Z-Achse und einen ausgesuchten Punkt<br />
auf der Erde (Sternwarte von Greenwich)<br />
4. Y-Achse: Drehung der X-Achse um 90 ◦ gegen den Uhrzeigersinn<br />
Wegen seiner geozentrischen Lagerung und seiner festen Verbindung mit der Erde werden die Koordinaten<br />
gelegentlich mit dem Kürzel ECEF (Earth Centered Earth Fixed) gekennzeichnet.<br />
5
Z<br />
Greenwich<br />
Y<br />
X<br />
Abbildung 2.1: Dreidimensional geozentrisch kartesisches Koordinatensystem [Bauer, 2003]<br />
Bei der Realisierung eines globalen geozentrischen Referenzsystems ist man auf die Hilfe unterschiedlicher<br />
Satellitenverfahren und anderer Raumtechniken angewiesen. Bei der Verarbeitung der dabei<br />
entstandenen Beobachtungen müssen Verabredungen über eine Vielzahl von Parametern getroffen<br />
werden, die in die Berechnung der Koordinaten der Punkte auf dem Erdkörper - also der Berechnung<br />
des Referenznetzes - einfließen: z. B. Erdumdrehungsgeschwindigkeit und Masse der Erde. Da solche<br />
geodätische Weltsysteme auf einer Vielzahl von Konventionen beruhen, werden sie auch häufig mit<br />
dem Kürzel ”<br />
CT“ (Conventional Terrestrial) versehen. Als Ergebnis der Realisierung des Systems<br />
erhält man dreidimensionale kartesische Koordinaten global verteilter Referenzstationen.<br />
[Bauer, 2003]<br />
Einige der wichtigsten derzeit realisierten globalen Referenzsysteme sind im Folgenden aufgeführt:<br />
ITRFyy: International Terrestrial Reference Frame<br />
Ungefähr jährlich wird aus Beiträgen von VLBI (Very Long Baseline Interferometry), SLR (Satellite<br />
Laser Ranging), <strong>GPS</strong>,u.ä. (ein paar hundert Stationen) eine neue (genauere) Realisierung<br />
des ITRS (International Terrestrial Reference System) berechnet (yy=Jahr der Berechnung).<br />
Die Genauigkeit der Stationskoordinaten und Geschwindigkeiten beträgt rund 5-15 mm respektive<br />
2-3 mm/Jahr. Die sehr genauen <strong>GPS</strong>-Satellitenbahnen des IGS (IGS Precise Orbits)<br />
beziehen sich auf dieses System.<br />
WGS-84: World Geodetic System 1984<br />
Das WGS-84 ist das eigentliche Referenzsystem des <strong>GPS</strong>. Dieses System wird durch die Koordinaten<br />
der 5 Monitor Stations realisiert und stimmt innerhalb von ca. 5 cm mit den ITRFs<br />
überein. Die Broadcast Ephemerides beziehen sich auf dieses System. Wegen der Bahn- und<br />
Satellitenuhrfehler der Broadcast Ephemerides kann man sich in diesem System ”<br />
nur“ mit<br />
Metergenauigkeit einmessen. Zur Definition des WGS-84 gehören noch weitere Grössen wie<br />
Schwerefeldkoeffizienten der Erde, Werte für die Lichtgeschwindigkeit c und GM (Produkt<br />
aus Gravitationskonstante und Erdmasse) etc.<br />
6
ETRS89: European Terrestrial Reference System 1989.0<br />
Beim ETRS89 wurde die mittlere Plattenbewegung der europäischen Stationen abgezogen.<br />
Dadurch werden die Bewegungen der meisten europäischen Stationen in diesem System sehr<br />
klein. Die Koordinaten der EUREF-Punkte (Europäisches Referenznetz) sind in diesem System<br />
gegeben.<br />
GRS-80: Geodätisches Referenzsystem 1980<br />
Wurde im Jahr 1979 von der Internationalen Union für Geodäsie und Geophysik (IUGG) definiert.<br />
Das für <strong>GPS</strong> benutzte WGS-84 verwendet praktisch dasselbe Ellipsoid, enthält aber mehr<br />
Daten über das Schwerefeld.<br />
[Görres, 2004, Rothacher, 2004]<br />
2.2.2 Zeitliche Bezugssysteme<br />
In Zusammenhang mit <strong>GPS</strong> sind die folgenden Zeitsysteme wichtig (s. auch Abb. 2.2):<br />
UT: Universal Time<br />
Bezeichnet die mittlere Sonnenzeit für den Nullmeridian. UT bezieht sich definitionsgemäß auf<br />
die augenblickliche Rotationsachse der Erde.<br />
UT1: Universal Time 1<br />
Da Polschwankungen UT beeinflussen, wird eine Reduktion der beobachteten UT auf den<br />
konventionellen Pol (CIO) durchgeführt. Ergebnis dieser Reduktion ist UT1. UT1 bezieht sich<br />
definitionsgemäß auf die aktuelle Erdrotation, eine mittlere Sonnenbahn und den mittleren Pol.<br />
GAST: Greenwich Apparent Sideral Time<br />
Bezeichnet die momentane Sternzeit für den Nullmeridian bezogen auf den Meridiandurchgang<br />
eines Fixsterns (Frühlingspunkt).<br />
TAI: Temps Atomique International<br />
Als genaueste Zeiteinheit gilt heute die von der Internationalen Kommission für Maße und<br />
Gewicht eingeführte Sekunde. Das zu dieser Zeiteinheit gehörende Zeitsystem ist die Atomzeit<br />
(TAI). TAI wird durch ein Ensemble von Atomuhren realisiert.<br />
UTC: Universal Time Coordinated<br />
Zwar ist TAI das genaueste Zeitsystem, jedoch wird für astronomische Zwecke die auf der<br />
Erdrotation beruhende Zeit UT1 benötigt. Um beiden Aspekten Rechnung zu tragen wurde<br />
UTC eingeführt. Die Zeiteinheit von UTC ist die SI-Sekunde der Atomzeit, ihre Skala ist<br />
UT1 angepasst. UTC unterscheidet sich von TAI nur durch eine ganze Anzahl von Schaltsekunden.<br />
UTC wird durch das Einfügen von Schaltsekunden immer wieder an UT1 angepasst:<br />
|UT1 − UTC| < 0, 9 sec<br />
<strong>GPS</strong>T: <strong>GPS</strong>-Systemzeit<br />
Die <strong>GPS</strong>-Zeit wird an TAI angepasst. Der Unterschied TAI − <strong>GPS</strong> = 19 sec ist konstant.<br />
Die <strong>GPS</strong>-Zeit wird in <strong>GPS</strong>-Wochen (Beginn 06.01.1980) und <strong>GPS</strong>-Sekunden (seit Beginn der<br />
Woche) gezählt. Die Woche beginnt jeweils am Sonntag 00:00 Uhr. Der Unterschied zwischen<br />
<strong>GPS</strong> und UTC beträgt immer eine ganze Anzahl von Sekunden. Zuzeit gilt: <strong>GPS</strong> − UTC =<br />
13 sec<br />
[Bauer, 2003, Görres, 2004, Rothacher, 2004]<br />
7
Zeit Offset<br />
[sec]<br />
0<br />
TAI<br />
-19<br />
<strong>GPS</strong>T<br />
06.Januar 1980<br />
0:00 Uhr<br />
UTC<br />
UT1<br />
Abbildung 2.2: Zeitsysteme [Görres, 2004]<br />
2.3 Satellitenbahnen<br />
Bei der Positionsbestimmung mit <strong>GPS</strong> übernehmen die Satelliten die Aufgabe von räumlichen Passpunkten.<br />
Aus diesem Grund muss die Position ihres Sendezentrums zu jedem Zeitpunkt mit ausreichender<br />
Genauigkeit bekannt sein. Grundlage für die Berechnung der Satellitenbewegungen sind die<br />
Kepler’schen Gesetze.<br />
Grundsätzlich gibt es drei Arten von Datensätzen mit deren Hilfe der Positions- und Geschwindigkeitsvektor<br />
der Satelliten im globalen Referenzsystem zu jedem Zeitpunkt bestimmt werden kann:<br />
Almanach Daten, Broadcast Ephemeriden und Präzise Ephemeriden. Die Unterscheidung der Datensätze<br />
liegt in ihrer Genauigkeit (s. Tabelle 2.1).<br />
IGS-Produkt Verfügbarkeit Genauigkeit<br />
Final Orbits 13 Tage 2 cm<br />
Ultra-Rapid (observed half) 3 Stunden < 5 cm<br />
Ultra-Rapid (predicted half) Echtzeit 10 cm<br />
Broadcast Orbits Echtzeit 200 cm<br />
Almanach Orbits Echtzeit einige km<br />
Tabelle 2.1: Übersicht der Orbitdaten [Rothacher, 2004]<br />
2.3.1 Almanach Daten<br />
Die Almanach Daten enthalten ungefähre Bahninformationen und werden vom Satelliten in der<br />
Navigationsnachricht (Navigation Message) dem Empfänger übermittelt. Almanach Daten sind für<br />
alle Satelliten gegeben und ermöglichen dem Empfänger die Satellitensuche und dienen <strong>zur</strong> Planung<br />
von Kampagnen. Sie werden mindestens einmal pro Woche erneuert.<br />
8
2.3.2 Broadcast Ephemeriden<br />
Die Broadcast Ephemeriden beruhen auf den Beobachtungen der Monitorstationen des <strong>GPS</strong>-<br />
Kontrollsegments. Die Bahn- und Satellitenuhrbestimmung wird mit Pseudorange-Messungen dieser<br />
fünf Stationen durchgeführt (mit den Daten der letzten 12-24 Stunden). Die Bahnen und Uhren<br />
werden dann 12-36 Stunden extrapoliert und für jedes Zweistundenintervall werden Bahnelemente<br />
(und Satellitenuhrkorrekturen) zu den Satelliten hochgeschickt. Da die Broadcast-Bahnen in Echtzeit<br />
verfügbar sind und direkt von den Satelliten zu den Empfängern gesandt werden (Navigation Message),<br />
sind sie besonders wichtig für Echtzeitanwendungen und alle Anwendungen, die keine große<br />
Genauigkeit erfordern.<br />
2.3.3 Präzise Ephemeriden<br />
Seit Anfang der 90er Jahre bestimmt der zivile International <strong>GPS</strong> Service (IGS 1 ) präzise Bahndaten,<br />
die mit zeitlicher Verzögerung und somit nur für Postprocessing-Anwendungen <strong>zur</strong> Verfügung stehen.<br />
Als Datengrundlage dienen die Zweifrequenz-<strong>GPS</strong>-Beobachtungen von etwa 100 global verteilten<br />
Stationen, die in 24-Stunden-Blöcken von den Stationen abgerufen werden. In sieben Analysezentren<br />
werden die Orbits aller Satelliten berechnet und dann zu einer gemeinsamen Lösung zusammengefasst.<br />
Im Gegensatz zu den Broadcast-Bahnen basieren hier die Bahnbestimmungen auf den<br />
Trägerphasenmessungen. Die entgültigen IGS-Orbits liegen etwa nach zwei Wochen vor und weisen<br />
eine Genauigkeit von einigen Zentimetern auf. Die Bahninformation ist im sogenannten SP3-Format<br />
verfügbar: rechtwinklige, geozentrische, erdfeste Satellitenpositionen im ITRF und Satellitenuhrkorrekturen<br />
in Abständen von 15 Minuten.<br />
Die neueste Entwicklung der IGS-Bahnprodukte sind die Ultrarapid Orbits. Sie basieren auf Beobachtungen<br />
einer Untergruppe von IGS-Stationen und werden alle 12 Stunden neu berechnet. Sie<br />
bestehen aus 48 Stunden Orbitdaten, wobei die Daten der ersten 24 Stunden auf in diesem Zeitraum<br />
durchgeführten Beobachtungen beruhen und die zweiten 24 Stunden extrapoliert wurden. Ihre<br />
Genauigkeit liegt bei ca. 5 cm für den beobachteten und 10 cm für den vorhergesagten Teil.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001, Hugentobler, 2000, Rothacher, 2004]<br />
2.4 <strong>GPS</strong>-Signale, Datencodierung<br />
Eine sehr übersichtliche Darstellung der <strong>GPS</strong>-Signalstruktur findet sich bei Rothacher, daher folgt<br />
dieser Abschnitt in weiten Teilen seinen Ausführungen.<br />
Alle Signale des Satelliten werden durch eine Atomuhr mit einer Frequenz von 10,23 MHz erzeugt.<br />
Zwei Grundfrequenzen (Carrier Signals, Sinus-/Kosinuswellen, auch Träger genannt) im L-Band<br />
werden permanent von den Satelliten ausgesendet:<br />
• L 1 : f 1 =1575,43 MHz (=154x10,23 MHz), λ 1 =19 cm<br />
• L 2 : f 2 =1227,60 MHz (=120x10,23 MHz), λ 2 =24 cm<br />
Auf den Sinus-/Kosinuswellen werden durch BPSK-Modulationen (Binary Phase Shift Keying, BPSK)<br />
sogenannte Codes aufmoduliert. Diese Codes bestehen aus einer Folge von binären Werten +1 und<br />
-1 (Bits). Jedesmal wenn ein Wechsel des Code-Wertes erfolgt (von +1 auf -1 oder von -1 auf +1),<br />
wird die Trägerphase um 180 ◦ gedreht (s. Abb. 2.3).<br />
1 http://igscb.jpl.nasa.gov, Mai 2005<br />
9
Zyklus<br />
Träger<br />
+1<br />
Code<br />
-1<br />
modulierter<br />
Täger<br />
Abbildung 2.3: Phasenmodulation des Trägersignals mit einer Binärsequenz [Hofmann-Wellenhof, 2001]<br />
Zwei Codes sind wichtig, um dem Empfänger ”<br />
mitzuteilen“, wann das Signal vom Satelliten ausgesandt<br />
wurde. Es sind beides sogenannte Pseudo Random Noise Codes (PRN-Codes), pseudozufällige<br />
Folgen, die sich nach einer bestimmten Anzahl von Chips (= Bits ohne Information) wiederholen:<br />
C/A-Code: Clear Access / Coarse Acquisition<br />
Der C/A-Code besteht aus 1023 Chips und wiederholt sich nach jeweils 1 ms. Eine Chip-Länge<br />
beträgt 293 Meter und somit liegt seine Mehrdeutigkeit bei der Auswertung im Bereich von<br />
300 km. Der C/A-Code wird nur dem L 1 -Träger aufmoduliert.<br />
P-Code: Protected / Precise<br />
Der P-Code wiederholt sich eigentlich nach 266,4 Tagen, jeder Satellit erzeugt aber nur ein<br />
7-Tages-Stück dieses Codes. Trotzdem liegt seine Mehrdeutigkeit weit über der maximal möglichen<br />
Entfernung zwischen Satellit und Empfänger. Seine Chip-Länge beträgt 29,3 Meter. Der<br />
P-Code wird sowohl auf die L 1 - als auch auf die L 2 -Trägerphase aufmoduliert.<br />
Damit ein <strong>GPS</strong>-Empfänger eine Ortung in Echtzeit durchführen kann, müssen die Bahndaten des<br />
Satelliten, Satellitenuhrkorrekturen und andere Zusatzinformationen ständig <strong>zur</strong> Verfügung stehen.<br />
Das <strong>GPS</strong>-Signal muss daher diese Daten, die sogenannte Navigation Message, mitenthalten. Die<br />
Navigation Message wird also zusätzlich zu den Codes auf den Träger aufmoduliert. Die Codierung<br />
der Navigation Message benötigt 1500 Bits, die mit einer Frequenz von 50 Hz (jede 31 508 400te<br />
Welle trägt ein Bit) in 30 Sekunden übermittelt werden.<br />
Code C/A-Code P-Code<br />
Frequenz 1,023 MHz 10,23 MHz<br />
Chipping-Rate 1,023 ·10 6 bps 10,23 ·10 6 bps<br />
Chip-Länge ≈ 293 m ≈ 29,3 m<br />
Repetitionsrate 1 ms 1 Woche<br />
Code-Typ 37 unterschiedliche Codes 37 1-Wochen-Stücke<br />
Eigenschaften Einfachere Signalaquisition genauer<br />
Tabelle 2.2: PRN Code [Hofmann-Wellenhof, 2001]<br />
10
Fundamental<br />
Frequency<br />
10,23 MHz<br />
/ 10<br />
x 154<br />
L1<br />
1575,42<br />
MHz<br />
C/A Code<br />
1,023<br />
MHz<br />
P Code<br />
10,23<br />
MHz<br />
x 120<br />
L2<br />
1227,60<br />
MHz<br />
P Code<br />
10,23<br />
MHz<br />
50 BPS Navigation Message<br />
Abbildung 2.4: Schema der Signal- und Frequenzerzeugung im <strong>GPS</strong>-Satelliten [Leica, 2000]<br />
In mathematischer Schreibweise haben die L 1 - und L 2 -Signale folgende Gestalt:<br />
L 1 (t) = A P1 · P (t) · D (t) · cos (ω 1 t + Φ 1 (t)) + A C · C (t) · D (t) · sin(ω 1 t + Φ 1 (t))<br />
L 2 (t) = A P2 · P (t) · D (t) · cos (ω 2 t + Φ 2 (t))<br />
wobei:<br />
t<br />
Zeit (gemäß der Satellitenuhr)<br />
A P1 , A P2 , A C<br />
Amplituden des P-Code auf L 1 und L 2 und des C/A-Code<br />
auf L 1<br />
P (t), C (t) P-Code und C/A-Code Modulationssignal (+1 oder -1)<br />
D (t) Modulationssignal der Navigation Message (+1 oder -1)<br />
ω 1 = 2πf 1 , ω 2 = 2πf 2 Kreisfrequenz des Signals<br />
Φ 1 (t), Φ 2 (t)<br />
Phasenverschiebung im L 1 - und L 2 -Signal durch Frequenzabweichung<br />
und Rauschen<br />
In der Vermessung spielt der C/A-Code bzw. der P-Code nur eine untergeordnete Rolle. Zwar<br />
werden diese in der Auswertung verwendet um sich an die ”<br />
richtige Koordinate“ heranzutasten<br />
bzw. helfen bei der annähernden Festlegung des Mehrdeutigkeitsparameters der Trägerphase, die<br />
erforderlichen Genauigkeiten können jedoch nur durch eine Auswertung der Trägerphasen und eine<br />
Bestimmung des Mehrdeutigkeitsparameters erreicht werden.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001, Rothacher, 2004]<br />
2.5 Signalausbreitung in der Erdatmosphäre<br />
Die Erdatmosphäre, die Erde umgebende Hülle aus Gasen, erstreckt sich bis in eine Höhe von<br />
1000 km. Sie besitzt einen schichtartigen Aufbau und kann nach unterschiedlichen Kriterien beschrieben<br />
werden. Um das Verhalten elektromagnetischer Signale in der Erdatmosphäre zu erfassen,<br />
unterscheidet man zwei Bereiche: zum einen die Troposphäre, bis zu einer Höhe von ca. 50 km, in<br />
welcher hauptsächlich die bodennahen Einflüsse in den ersten Kilometern über der Erdoberfläche<br />
betrachtet werden. Zum anderen die Ionosphäre, in ca. 50 km bis 1000 km Höhe, in der die Einflüsse<br />
des ionisierten Teils der Atmosphäre betrachtet werden.<br />
11
Auf eine elektromagnetische Welle, welche auf ihrem Weg vom Satelliten zum Empfänger die Erdatmosphäre<br />
durchläuft, wirken in diesem Zusammenhang störende Einflüsse, als dass es keinen für alle<br />
Teile einheitlichen Brechungsindex gibt. Dies hat <strong>zur</strong> Folge, dass sich ein Signal nicht als Gerade<br />
ausbreitet, sondern eine Raumkurve beschreibt. Das Problem bei Laufzeitmessungen ist, dass der<br />
Brechungsindex in der Atmosphäre, und damit die Ausbreitungsgeschwindigkeit des Signals, nur mit<br />
begrenzter Genauigkeit bekannt ist.<br />
2.5.1 Ionosphärische Refraktion<br />
Die Ionosphäre ist charakterisiert durch ein hohes Maß an ionisierten Gasmolekülen, welche durch die<br />
Ultraviolett- und Röntgenstrahlung der Sonne hervorgerufen werden. Zudem ist sie einem stetigen<br />
zeitlichen Wechsel unterworfen, welcher in erster Linie mit der Intensität der Sonnenstrahlung in Verbindung<br />
steht (tageszeitliche Schwankungen). Durch die unterschiedliche Absorbation der Strahlung<br />
in den jeweiligen Höhen bildet sich ein schichtartiger Aufbau, bei welchem die einzelnen Schichten<br />
sich durch ihre Elektronendichte N e (Anzahl der Elektronen pro m 3 ) charakterisieren lassen.<br />
Der Einfluss der Ionosphäre auf ein Signal ist abhängig von der gesamten Elektronendichte entlang<br />
des Signalweges, dem Elektronengehalt TEC (Total Electron Content). Neben den tageszeitlichen<br />
Schwankungen unterliegt der Elektronengehalt TEC auch noch anderen Einflüssen, wie unter anderem<br />
dem Sonnenaktivitätszyklus und kurzzeitigen Sonneneruptionen, was es in der Summe sehr<br />
schwer macht die Einwirkungen der Ionosphäre auf die Signalausbreitung zu modellieren.<br />
Speziell in der Polarregion ist der Elektronengehalt zwar gering, aber auch sehr inhomogen. Auf<br />
Grund der Ausprägung des Erdmagnetfeldes entfaltet hier der Partikelstrom in der Folge von Sonneneruptionen<br />
seine Hauptwirkung in der Form von ionosphärischen Störungen und auch Polarlichtern<br />
[Bauer, 2003].<br />
Die Hauptauswirkung der ionosphärischen Refraktion liegt darin, dass die Ausbreitungsgeschwindigkeit<br />
der Satellitensignale in der Ionosphäre von der Lichtgeschwindigkeit im Vakuum abweicht.<br />
Die Ionosphäre ist zudem für Mikrowellen ein dispersives Medium, d. h. die Änderung der Ausbreitungsgeschwindigkeit<br />
ist frequenzabhängig, was wiederum <strong>zur</strong> Folge hat, dass es für ein sie durchlaufendes<br />
Signal unterschiedliche Brechungsindizes, den Phasen- und Gruppenbrechungsindex, bzw.<br />
unterschiedliche Geschwindigkeiten, die Phasen- und Gruppengeschwindigkeit, gibt.<br />
Es lässt sich zeigen, dass gilt [Bauer, 2003]:<br />
(<br />
v PH = c · 1 + 40, 3 · N )<br />
e<br />
f 2<br />
(<br />
bzw. v GR = c · 1 − 40, 3 · N )<br />
e<br />
f 2<br />
(2.1)<br />
Es ist ersichtlich, dass die Phasen- und Gruppengeschwindigkeit um den gleichen Betrag, aber mit<br />
unterschiedlichem Vorzeichen von der Lichtgeschwindigkeit abweicht.<br />
Betrachtet man die Laufzeitfehler, so ergibt sich für das Gruppensignal [Bauer, 2003]:<br />
und mit umgekehrten Vorzeichen für die Phase:<br />
∆t ion,GR = + 1 c · 40, 3<br />
f 2 · TEC (2.2)<br />
∆t ion,PH = − 1 c · 40, 3<br />
f 2 · TEC (2.3)<br />
Die ionosphärisch bedingten Laufzeitfehler erster Ordnung sind also allein vom Elektronengehalt der<br />
Ionosphäre abhängig.<br />
12
2.5.1.1 Erfassung der ionosphärischen Refraktion<br />
Prinzipiell gibt es zwei mögliche Verfahren die notwendigen Korrekturen an den Signalen zu bestimmen:<br />
zum einen durch eine Ableitung aus Zweifrequenzmessungen und zum anderen durch die<br />
Verwendung von Korrekturmodellen. Genauere Korrekturmodelle werden im allgemeinen durch die<br />
Auswertung einer großen Anzahl von Zweifrequenzmessungen gewonnen. Da in den Polarregionen<br />
solche Messungen jedoch nicht in ausreichender Menge vorhanden sind, ist diese Möglichkeit in<br />
unserem Falle nicht gegeben.<br />
2.5.1.2 Zweifrequenzkorrektur<br />
Da der Brechungsindex in der Ionosphäre von der Frequenz des Signals abhängig ist, ergibt sich die<br />
Möglichkeit, ionosphärische Refraktion bei der Verwendung von Zweifrequenzempfängern zu erfassen<br />
(s. auch 2.8.2). Es gilt [Bauer, 2003]:<br />
S 0 =<br />
2<br />
2<br />
f 1<br />
f 2 2 1 − f · c · ∆t f 2<br />
gr1 −<br />
2 f 2 2 1 − f · c · ∆t gr2 (2.4)<br />
2<br />
TEC = 1 2<br />
40, 3 · f 12 · f 2<br />
f 2 2 1 − f · c · (∆t gr2 − ∆t gr1 ) (2.5)<br />
2<br />
Hierbei bezeichnen ∆t gr1 und ∆t gr2 die durch die ionosphärischen Laufzeitfehler verfälschten Gruppenlaufzeiten<br />
zweier Frequenzen f 1 und f 2 . Die beiden zu bestimmenden Unbekannten sind die<br />
Raumstrecke S 0 und der ionosphärische Elektronengehalt TEC.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001]<br />
2.5.2 Troposphärische Refraktion<br />
Unter der Troposphäre versteht man in Bezug auf <strong>GPS</strong>-Messungen die unteren 50 km der Atmosphäre,<br />
welche auch als Neutrale Atmosphäre bezeichnet werden, da sie so gut wie keine freien<br />
Elektronen und Ionen enthält. Ursache für die Refraktion ist die Dichte der Gasmoleküle, welche<br />
mit abnehmender Höhe stetig zunimmt. Da die Neutrale Atmosphäre in Bezug auf Mikrowellen kein<br />
dispersives Medium ist, kommt eine Bestimmung der Refraktionseinflüsse auf Grund von Zweifrequenzauswertungen<br />
nicht zum Tragen.<br />
Hopfield (1969) zeigt, dass <strong>zur</strong> besseren Betrachtung der troposphärischen Refraktion eine Aufteilung<br />
dieser in eine trockene und eine feuchte Komponente sinnvoll ist. Die trockene Komponente steht<br />
hierbei für die trockenen Gase, welche über alle Bereiche recht homogen sind. Die feuchte Komponente<br />
beschreibt den Wasserdampfgehalt, welcher sich zwar nur auf die unteren 11 km erstreckt,<br />
jedoch zeitlich und räumlich sehr stark schwankt. Insgesamt hat die feuchte Komponente auf die<br />
Troposphärische Refraktion allerdings nur einen Anteil von ca. 10 %.<br />
Es gibt verschiedene Ansätze mit Hilfe der Parameter atmosphärischer Druck, Partialdruck, Wasserdampf<br />
und Temperatur einen Refraktionsindex zu bestimmen. Da jedoch eine Bestimmung dieser<br />
Parameter entlang des Signalweges nicht möglich ist, führt man Standardatmosphärenparameter und<br />
-modelle ein. Die bekanntesten Modelle hierbei sind Hopfield (1971) und Saastamoinen (1973), für<br />
lange Basislinien hat sich das Modell von Niell bewährt.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001] 2<br />
2 http://nssdc.gsfc.nasa.gov/space/model/, Mai 2005<br />
13
2.5.3 Mehrwegeausbreitung (Multipath)<br />
Der Effekt wird schon sehr gut durch seinen Namen beschrieben: Ein vom Satelliten ausgesendetes<br />
Signal erreicht den Empfänger über mehr als einen Weg. Mehrwegeausbreitung wird hauptsächlich<br />
durch eine Reflektion des Signals an Oberflächen in der Nähe des Empfängers hervorgerufen. Dabei<br />
kommt es zu einer Überlagerung des direkten und des reflektierten Signals. Die indirekten Signale<br />
haben immer eine längere Laufzeit als die direkten Signale und erfahren noch eine Veränderung<br />
der zirkularen Rechtspolarisierung des Ursprungssignals in eine Linkspolarisation. Die Größe der<br />
Verfälschung des indirekten Signals hängt von der Umweglänge, den Reflektionseigenschaften in der<br />
Umgebung der Empfängerantenne und vom Antennenempfangsverhalten ab.<br />
Abbildung 2.5: Mehrwegeausbreitung<br />
Wie in Abbildung 2.5 zu sehen ist, erreicht das Signal den Empfänger über drei Wege, einen direkten<br />
und zwei indirekte. Als Folge dessen zeigt das empfangene Signal ein relatives Phasen-offset und die<br />
Phasendifferenz ist proportional <strong>zur</strong> Differenz der Wegstrecken.<br />
Nach Georgiandon und Kleusberg (1988) beträgt der theoretisch maximal mögliche Fehler der<br />
beobachteten Trägerphase ein Viertel der Wellenlänge des Trägersignals, welches für L 1 4,8 cm und<br />
für L 2 6,1 cm sind. Da in der Realität jedoch niemals ein Signal zu 100 % reflektiert wird, kommt<br />
es in der Praxis selten zu einem Mehrwegefehler für L 1 und L 2 größer als 2-3 cm. Bei der Auswertung<br />
der Originalsignale mit Linearkombinationen verstärken sich jedoch die Mehrwegeeffekte. Bei<br />
der ionosphärenfreien Linearkombination verstärkt sich der maximale Mehrwegefehler zum Beispiel<br />
ungefähr um den Faktor drei. Rein aus der Geometrie ist es natürlich auch ersichtlich, dass die<br />
empfangenen Signale eines Satelliten mit einer niedrigeren Elevation stärker durch Mehrwegeeffekte<br />
beeinträchtigt sind als Signale von Satelliten mit einer höheren Elevation. Durch die sich ständig<br />
verändernde Geometrie zwischen Satellit, Reflektor und Empfangsantenne variiert der zusätzliche<br />
Signalweg mit der Zeit und es kommt zu einer periodischen Veränderung der Phasenfehler des Summensignals.<br />
Die Periode kann dabei zwischen wenigen Minuten und mehreren Stunden liegen.<br />
Zwar gibt es durch die sich ständig verändernde geometrische Situation kein allgemein gültiges Modell<br />
des Mehrwegeeffekts, jedoch sind einige Möglichkeiten entwickelt worden, diesen Effekt zumindest<br />
zu verringern. Hierbei gibt es nach Ray (1999), drei Ansatzpunkte: eine Veränderung des Antennendesigns,<br />
eine Verbesserung der Empfängertechnologie und eine optimierte Signal- und Datenverarbeitung.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001]<br />
14
2.5.4 Signalbeugung (Signal Diffraction)<br />
Mit dem Auftreten von Diffraktionseinflüssen ist immer dann zu rechnen, wenn über dem Antennenhorizont<br />
Sichthindernisse den Empfang des direkten Satellitensignals behindern. Auf Grund der<br />
Signalbeugung an der Kante des abschattenden Objekts kann ein indirektes Satellitensignal empfangen<br />
werden, obwohl das direkte Signal die Antenne nicht erreicht.<br />
Abbildung 2.6: Signalbeugung [Bauer, 2003]<br />
Wie auch bei der Mehrwegeausbreitung weist das indirekte Signal im Vergleich zum direkten Signal<br />
eine längere Laufzeit auf und es kommt zu Messfehlern. Im Gegensatz <strong>zur</strong> Mehrwegeausbreitung<br />
kommt es bei der Signalbeugung jedoch nicht zu einer Überlagerung des direkten und des indirekten<br />
Signals, was bedeutet, dass der Messfehler dem tatsächlichen zusätzlichen Weg entspricht und nicht<br />
frequenzabhängig ist.<br />
Eine Möglichkeit gebeugte Signale zu erkennen und entsprechend zu verarbeiten ist durch ihre stark<br />
verringerte Signalstärke gegeben. Entsprechende Phasenbeobachtungen sollten dann mit einem verringerten<br />
Gewicht in die Auswertung eingeführt werden.<br />
Viele der z.Z. gängigen Auswertungsprogramme erfassen den Informationsgehalt der Signalstärke<br />
noch nicht und können daher Signalbeugungsfehler, insbesondere bei kinematischen Anwendungen,<br />
nicht wirksam verringern.<br />
[Möser, 2000, Wanninger, 2000a]<br />
2.5.5 Behandlung von Phasensprüngen (Cycle Slips)<br />
Da Phasensprünge bei den von mir betrachteten Messungen nicht oder nur zu einem ganz geringen<br />
Teil vorkommen, soll hier nur auf ihre Grundzüge eingegangen werden.<br />
2.5.5.1 Beschreibung<br />
Beim Starten eines <strong>GPS</strong>-Empfängers, dem Zeitpunkt t 0 , wird die Trägerphase registriert und ein<br />
Zähler initialisiert (d.h. auf Null gesetzt). Während der Beobachtung (Tracking) wird der Zähler<br />
immer dann um ein Inkrement erhöht, sobald die Trägerphase von 2π auf 0 wechselt. Der vom<br />
Phasenakkumulator zu einer bestimmten Epoche angezeigte Wert ist die Summe aus dem gemessenen<br />
15
Phasenbruchteil (zwischen 0 und 2π) und den ganzzahligen Phasenänderungen n zwischen t 0 und<br />
t i . Der Anteil von ganzen Zyklen zwischen Satellit und Empfänger N zu Beginn der Messung (zum<br />
Zeitpunkt t 0 ) ist unbekannt. Dieser Mehrdeutigkeitsterm N bleibt konstant, solange es zu keinem<br />
Signalverlust (Loss of Lock) kommt. Sollte dies der Fall sein, kommt es zu einem Sprung in den vom<br />
Phasenakkumulator angezeigten Werten (Cycle Slip).<br />
Phasensprünge können hervorgerufen werden durch: un<strong>zur</strong>eichende Signalstärke (niedrige Elevation),<br />
Sichthindernisse, Mehrwegeausbreitung oder durch Einflüsse der Ionosphäre.<br />
Phase<br />
t t t<br />
i i+1 i+2<br />
Zeit<br />
Abbildung 2.7: Graphische Darstellung von Phasensprüngen [Hofmann-Wellenhof, 2001]<br />
2.5.5.2 Aufdecken und Reparieren von Phasensprüngen<br />
Das Erkennen und Reparieren von Phasensprüngen erfordert das Zuordnen eines Phasensprungs zu<br />
einer Epoche und die Bestimmung seiner Größe.<br />
Das Grundprinzip ist in Abbildung 2.7 zu erkennen. Betrachtet man die Phasenmessung als Funktion<br />
der Zeit, so zeigt sich, dass der Graph vor und nach dem Phasensprung einen stetigen Verlauf hat.<br />
Ein Phasensprung verursacht eine Unstetigkeit, die außerhalb der sonstigen Einflüsse (Messrauschen)<br />
liegt. Damit ist es möglich einem bestimmten Zeitpunkt (Epoche) einen Phasensprung zuzuordnen.<br />
Probleme bereiten allerdings Phasensprünge in der Größenordnung einer ganzen Anzahl von Zyklen<br />
(n · 2π), da diese nicht ohne weiteres vom Messrauschen unterschieden werden können.<br />
Aus diesem Grund werden anstelle der originären Beobachtungen einige der in Abschnitt 2.8 beschriebenen<br />
Beobachtungsdifferenzen bzw. Linearkombinationen verwendet, da bei ihnen das Messrauschen<br />
geringer ist.<br />
Die Bestimmung der Größe eines Phasensprungs gestaltet sich mitunter schwieriger. Ist der Phasensprung<br />
entdeckt, lassen sich die beiden Abschnitte, vor und nach dem Phasensprung, durch Funktionen<br />
approximieren. Die Differenz, welche die beiden Funktionen zum Zeitpunkt des Phasensprungs<br />
voneinander haben, liefert uns seine Größe. Für dir Anzahl ganzer Zyklen ist dieses Verfahren natürlich<br />
unbestimmt. Eine Bestätigung, dass die Korrektur erfolgreich war, können die Dreifachdifferenzen<br />
liefern. Sollte ein Phasensprung zwar erkannt worden, seine Behebung jedoch fehlgeschlagen sein,<br />
muss in die Beobachtungsgleichung ab diesem Zeitpunkt ein neuer Mehrdeutigkeitsparameter N<br />
eingeführt werden.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001]<br />
16
2.6 Einflüsse der Empfangseinheit<br />
2.6.1 Variationen des Antennenphasenzentrums<br />
Das geometrische Phasenzentrum von <strong>GPS</strong>-Antennen fällt nicht exakt mit dem elektrischen Phasenzentrum<br />
zusammen. Darüber hinaus ist das wirksame elektrische Phasenzentrum eine Funktion<br />
der Richtung, aus der das Satellitensignal eintrifft. Die Größenordnung der Abweichung des geometrischen<br />
vom elektrischen Phasenzentrum schwankt zwischen einigen Millimetern und wenigen<br />
Zentimetern. Vor präzisen GNSS-Messungen müssen also Korrekturwerte für Phasenzentrumoffset<br />
(PZO) und Phasenzentrumsvariationen (PZV) bestimmt werden. [Wanninger, 2002a]<br />
Für die Definition des Phasenzentrums einer Antenne eignet sich ihr scheinbares Sendezentrum, denn<br />
die Wellenfronten eines idealen punktförmigen Senders senden ihre Signale in einer konzentrischen<br />
Kugelform aus, wobei das Phasenzentrum mit dem Mittelpunkt der Kugeln zusammenfällt. In der<br />
Realität sind die Wellenfronten aber gestört. Das Phasenzentrum ist daher abhängig von der Strahlungsrichtung<br />
und befindet sich dann im Zentrum der Schmiegungskugel der Wellenfront in dieser<br />
Richtung. [Kahmen, 1997]<br />
Für die Antennen einer Baugruppe kann von ähnlichen Antennenphasenzentrumsfehlern ausgegangen<br />
werden, so dass bei gleicher Antennenausrichtung die Fehler bei der Relativmessung weitgehend<br />
herausfallen. Für präzise Anwendungen müssen die Antennen jedoch individuell kalibriert werden<br />
(z.B. relative Feldkalibrierung). [Rothacher, 2004]<br />
Der National Geodetic Service in Maryland, USA, führt seit einigen Jahren relative Antennenkalibrierungen<br />
durch und veröffentlicht die Ergebnisse baugruppenweise [Mader, 2001] 3 .<br />
Für die Verwendung von Korrekturwerten des Antennenphasenzentrums muss die räumliche Ausrichtung<br />
der Messantenne bekannt sein. Bei Vermessungsanwendungen ist dies meist durch Horizontierung<br />
und Nordorientierung der Antenne gegeben. Bei kinematischen Messungen wird man die<br />
Antennenausrichtung eher aus der Trajektorie ableiten und die Korrekturen entsprechend berücksichtigen.<br />
[Wanninger, 2002a]<br />
2.6.2 Empfängerfehler<br />
Der Empfängerfehler setzt sich zusammen aus:<br />
• Messrauschen<br />
• Hardwareverzögerung<br />
Unter Messrauschen versteht man zufällige Signalstörungen, die aus einem Zusammenspiel von<br />
Software- und Hardwareeffekten im Empfänger entstehen. Die Größenordnung des Messrauschens<br />
hängt dabei vom jeweiligen ”<br />
Empfängerindividuum“ ab.<br />
Hardwareverzögerungen bezeichnen die systematischen Verzögerungen der empfangenen Signale<br />
durch Vorgänge im Empfänger. Sie hängen von der jeweiligen Hardwarezusammenstellung ab und<br />
können messtechnisch erfasst werden.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001]<br />
3 http://www.ngs.noaa.gov/ANTCAL, Mai 2005<br />
17
2.7 Beobachtungsgleichungen<br />
Zu diesem Kapitel gibt es in den einzelnen Lehrbüchern sehr verschiedene Arten der Darstellung. Zwar<br />
behandeln alle das gleiche Thema, doch ist die Art der Präsentation teilweise sehr unterschiedlich.<br />
Am elegantesten erschienen mir dabei die Darstellungen von Rothacher. Dieser Abschnitt ist daher<br />
weitgehend dem Vorlesungsskriptum Sommersemester 2004 von Rothacher entnommen.<br />
2.7.1 Pseudorange- oder Code-Messungen<br />
Satellitenuhr, T s<br />
Übertragenes Signal<br />
Antenne<br />
Empfangenes Signal, generiert gemäß der Satellitenuhr T<br />
s<br />
Empfängeruhr,<br />
T r<br />
s<br />
( T - T )<br />
r<br />
Kopie des Signal, generiert gemäß der Empfängeruhr T<br />
r<br />
Abbildung 2.8: Pseudorange-Messung: Vergleich des Satellitensignals mit der Kopie des Empfängers (Blewitt)<br />
Der Satellit generiert gemäß seiner Uhr eine bestimmte Codesequenz. Der Empfänger am Boden<br />
wiederum erzeugt mit seiner Uhr dieselbe bekannte Sequenz ( ”<br />
Replika“ oder Kopie des Signals).<br />
Durch Korrelation des empfangenen Satellitensignals mit dem im Empfänger erzeugten Signal, kann<br />
der Empfänger die Signallaufzeit vom Satelliten zum Empfänger bestimmen (s. Abb. 2.8):<br />
Das im Empfänger erzeugte Signal wird zeitlich solange verschoben, bis die maximale Übereinstimmung<br />
(Korrelation) mit dem empfangenen Satellitensignal erreicht ist. Diese maximale Korrelation<br />
wird nun während der ganzen Messzeit duch einen ”<br />
Tracking Loop“ aufrechterhalten. Für die zeitliche<br />
Verschiebung, die zu einem bestimmten Zeitpunkt gemessen wird, gilt:<br />
∆T = T r − T s (2.6)<br />
Da ∆T auch die Fehler der Satelliten- und der Empfängeruhr enthält, wird die daraus berechnete<br />
Distanz c·∆T nicht als Range (Distanz) sondern als Pseudorange (Pseudodistanz, durch die Uhrfehler<br />
verfälscht) bezeichnet.<br />
Für die Pseudorange- oder Codemessung P s r kann man also schreiben:<br />
Dabei gilt:<br />
P s r = c (T r − T s ) (2.7)<br />
• Die Uhr des Empfängers r zeigt T r an, wenn das Signal (eine bestimmte Codesequenz) empfangen<br />
wird. T r ist also im Zeitsystem der Empfängeruhr gegeben.<br />
• Die Uhr des Satelliten s zeigt T s an, wenn das Signal ausgesandt wird. T s ist also im Zeitsystem<br />
der Satellitenuhr gegeben.<br />
• c : Lichtgeschwindigkeit im Vakuum.<br />
18
Genauer ausgeschrieben gilt also:<br />
P s r = c (T r − T s )<br />
= c (t r + δt r − t s − δt s )<br />
= c (t r − t s ) + cδt r − cδt s<br />
Dabei sind die verwendeten Größen wie folgt definiert:<br />
t r , t s<br />
δt r , δt s<br />
ρ s r<br />
= ρ s r + cδt r − cδt s (2.8)<br />
Zeitpunkte des Empfangs und der Emission des Signals in <strong>GPS</strong>-Zeit<br />
Empfänger- und Satellitenuhrfehler (Synchronisationsfehler gegenüber <strong>GPS</strong>-<br />
Zeit)<br />
Distanz zwischen Empfänger und Satellit<br />
Dies ist ein sehr vereinfachtes Modell. Insbesondere tauchen keine Verzögerungen durch die Atmosphäre<br />
auf (s. Abschnitte 2.3 und 2.5).<br />
Die Distanz ρ s r berechnet sich aus der Satellitenposition (x s , y s , z s ) und der Empfängerposition<br />
(x r , y r , z r ) nach Pythagoras:<br />
ρ s r =<br />
√<br />
(x s − x r ) 2 + (y s − y r ) 2 + (z s − z r ) 2 (2.9)<br />
Bekannt auf Grund der Navigation Message (s. Abschnitt 2.4) sind:<br />
• die Satellitenposition (x s , y s , z s ) (berechenbar aus den Keplerelementen der Navigation Message)<br />
• der Satellitenuhrfehler δt s (berechenbar aus den Uhr-Polynomkoeffizienten der Navigation Message)<br />
Somit ergeben sich insgesamt 4 Unbekannte:<br />
• Empfängerposition (x r , y r , z r )<br />
• Empfängeruhrfehler δt r<br />
Wenn Codemessungen zu 4 Satelliten s i vorhanden sind, erhält man ein Gleichungssystem mit 4<br />
Gleichungen und 4 Unbekannten. Die Gleichungen haben die Form:<br />
√<br />
P s i<br />
r = (x s i − xr ) 2 + (y s i − yr ) 2 + (z s i − zr ) 2 + cδt r − cδt s i<br />
(2.10)<br />
Dieses Gleichungssystem für die Unbekannten x r , y r , z r und δt r ist nicht linear und muss - beginnend<br />
mit Näherungswerten für die Unbekannten - iterativ gelöst werden (Linearisierung). Alternativ<br />
dazu wurde von Bancroft eine Methode entwickelt, die ohne die Einführung von Näherungswerten<br />
auskommt (Bancroft-Algorithmus).<br />
Falls mehr als 4 Satelliten gemessen wurden oder mehrere Messepochen zusammengefasst werden,<br />
um die Position des Empfängers (und die Empfängeruhrfehler) zu bestimmen, dann kommt die<br />
Ausgleichungsrechnung (Methode der kleinsten Quadrate) zum Zuge. Wenn in der Rechnung genaue<br />
Satellitenbahnen und Satellitenuhrkorrekturen (beide z.B. vom IGS) verwendet werden, kann man<br />
mit Codemessungen eine Positionsgenauigkeit im 1 m Bereich erreichen.<br />
19
2.7.2 Phasenmessung (Carrier Phase)<br />
Bei einer gleichmäßigen Rotation mit einer Frequenz f nimmt die Phasenlage (oder kurz: Phase) Φ<br />
linear mit der Zeit t zu:<br />
Φ = f · t + Φ 0 (2.11)<br />
Φ 0 bezeichnet hierbei eine unbekannte Anfangsphase. Die Phasenlage wird gemessen in Zyklen (eng.<br />
cycles = Anzahl der Schwingungen).<br />
Für die Phasenmessung Φ j A<br />
des Satelliten j durch den Empfänger A gilt in dem Moment, in dem<br />
die Empfängeruhr die Zeit T A zeigt:<br />
Φ j A = Φ 0,A − Φ j <strong>GPS</strong>,A<br />
(2.12)<br />
Φ 0,A<br />
Φ j <strong>GPS</strong>,A<br />
Von der Empfängeruhr erzeugte Referenzphase (Cycles) zum Zeitpunkt T A<br />
in der Empfängeruhrzeit.<br />
<strong>GPS</strong>-Phasensignal (Cycles), wie es für den Satelliten j zum Empfängerzeitpunkt<br />
T A vom Empfänger registriert wird.<br />
Das <strong>GPS</strong>-Signal (Phasenlage) bleibt dasselbe, wenn es vom Satelliten zum Empfänger läuft. Der<br />
Empfänger kennt aber die Phasenlage nur bis auf eine unbekannte Anzahl von ganzen Zyklen, also<br />
gilt:<br />
Φ j <strong>GPS</strong>,A = Φ<strong>GPS</strong>,j A<br />
− N j A<br />
(2.13)<br />
Φ <strong>GPS</strong>,j<br />
A<br />
N j A<br />
<strong>GPS</strong>-Phase, ausgesandt zum Empfänger A zum Zeitpunkt T j im Zeitsystem<br />
des Satelliten j.<br />
Phasenmehrdeutigkeit (Integer Phase Ambiguity, Initial Phase Bias) für den<br />
Satelliten j und den Empfänger A.<br />
Wenn der Empfänger das <strong>GPS</strong>-Signal verliert (Loss of Lock), kann er die ankommenden Wellenzüge<br />
nicht mehr kontinuierlich zählen und es kommt zu einem Sprung von einer ganzen Anzahl Zyklen im<br />
Wert von N j A<br />
, einem sogenannten Cycle Slip. Die Vorverarbeitung von <strong>GPS</strong>-Daten muss sich daher<br />
mit dem Korrigieren solcher Phasensprünge befassen (Cycle Slip Fixing)(s. auch Abschnitt 2.5.5).<br />
Die Phase des Referenzsignals (vom Empfänger erzeugt) läuft im Gleichschritt mit der Empfängeruhr,<br />
die zum Empfangszeitpunkt T A anzeigt (Gl. 2.11):<br />
Φ 0,A = fT A + α A (2.14)<br />
mit der Nominalfrequenz f und einem Instrumentenfehler α A (Verzögerung in Kabeln und Elektronik<br />
etc.).<br />
Die Phase des <strong>GPS</strong>-Signals (vom Satelliten erzeugt) läuft im Gleichschritt mit der Satellitenuhr, die<br />
im Moment der Emission auf T j steht (im Zeitsystem der Satellitenuhr):<br />
Φ <strong>GPS</strong>,j<br />
A<br />
= fT j + α j (2.15)<br />
20
mit dem Instrumentenfehler α j für den Satelliten j. Mit Gl. 2.13 folgt dann:<br />
Φ j <strong>GPS</strong>,A = Φ<strong>GPS</strong>,j A<br />
− N j A = fT j + α j − N j A<br />
(2.16)<br />
Damit erhalten wir durch Einsetzen von (2.14) und (2.16) in (2.12) die Beobachtungsgleichung für<br />
die Phasenmessung:<br />
Φ j A<br />
= Φ 0,A − Φ j <strong>GPS</strong>,A<br />
(<br />
)<br />
= (fT A + α A ) − fT j + α j − N j A<br />
(<br />
= f T A − T j) )<br />
+<br />
(N j A − αj + α A<br />
(2.17)<br />
Multipliziert man diese Gleichung noch mit der nominellen Wellenlänge λ = c/f, so ergibt sich die<br />
Phasenbeobachtungsgleichung, ausgedrückt in Längeneinheiten:<br />
L j A<br />
= λΦj A<br />
(<br />
= c T A − T j) )<br />
+ λ<br />
(N j A − αj + α A<br />
(<br />
= c T A − T j) + b j A<br />
(2.18)<br />
mit<br />
b j A = λ (<br />
N j A − αj + α A<br />
)<br />
(2.19)<br />
Den Term c ( T A − T j) bezeichnet man als Pseudorange-Term (siehe Gl. (2.8)) und b j A<br />
als Phase-<br />
Bias- oder Ambiguity-Term (Achtung: b j A<br />
ist wegen der Instrumentenfehler nicht ganzzahlig). Unter<br />
Benutzung von Gl. (2.8) folgt:<br />
L j A = ρj A + cδt A − cδt j + b j A<br />
(2.20)<br />
In dieser vereinfachten Form unterscheidet sich die Phasenbeobachtungsgleichung von derjenigen<br />
des Codes nur im Ambiguity-Term b j A<br />
. Für jeden Satelliten j gibt es also bei der Auswertung von<br />
Phasenbeobachtungen eine weitere Unbekannte b j A<br />
, die aus den Beobachtungen bestimmt werden<br />
muss (s. Abschnitt 2.9). Der Wert von b j A<br />
bleibt gleich, solange der Empfänger A das Signal des Satelliten<br />
j nicht verliert. Sobald eine Unterbrechung stattfindet, muss ein neuer Wert für b j A bestimmt<br />
werden. Der Wert von b j A<br />
vor und nach dem Signalverlust unterscheidet sich um eine ganze Anzahl<br />
von Wellenlängen.<br />
2.7.3 Verbessertes Modell für die Phasenbeobachtungen<br />
Bisher wurden weder Verzögerungen der Signale in der Troposphäre und in der Ionosphäre noch<br />
relativistische Korrekturen und Messfehler in der Beobachtungsgleichung berücksichtigt. Um wirklich<br />
hochgenaue <strong>GPS</strong>-Resultate zu erzielen, müssen noch viele Modellierungsdetails in die Beobachtungsgleichung<br />
einfliessen.<br />
21
Man betrachtet erneut die Beobachtungsgleichung (2.20) für die Phasenmessung. Der Term ρ j A =<br />
c ( t A − t j) = cτ j A<br />
enthält neben der geometrischen Distanz zwischen Satellit und Empfänger alle<br />
Effekte, die die Signalausbreitung vom Satellit zum Empfänger beeinflussen. Wir müssen daher den<br />
Term mit der Signallaufzeit τ j A<br />
folgendermaßen erweitern und ergänzen:<br />
∣ ( )∣<br />
cτ j A = ∣∣⃗rA<br />
(t A ) − ⃗r j t A − τ j ∣∣<br />
A + δρ<br />
j<br />
A,trp + δρj A,ion + δρj A,rel + δρj A,mul<br />
(2.21)<br />
wobei<br />
⃗r A (t A )<br />
⃗r j ( t j)<br />
δρ j A,trp<br />
δρ j A,ion<br />
δρ j A,rel<br />
δρ j A,mul<br />
Empfängerposition ( )<br />
zum Empfangszeitpunkt t A<br />
= ⃗r j t A − τ j A<br />
: Satellitenposition <strong>zur</strong> Emissionszeit t j<br />
Signalverzögerung in der Troposphäre<br />
Signalverzögerung in der Ionosphäre<br />
Relativistische Korrektur<br />
Einfluss der Mehrwegeausbreitung (multipath)<br />
Fügen wir noch den Messfehler ε j A<br />
der Beobachtung hinzu, so erhält man insgesamt für die Phasenbeobachtungsgleichung<br />
(2.20):<br />
L j A<br />
∣ ( )∣ = ∣∣⃗rA<br />
(t A ) − ⃗r j t A − τ j ∣∣<br />
A + δρ<br />
j<br />
A,trp + δρj A,ion + δρj A,rel + δρj A,mul . . .<br />
)<br />
. . . + cδt A − cδt j + λ<br />
(N j A − αj + α A + ε j A<br />
(2.22)<br />
[Bauer, 2003, Hehl, 2005c, Hofmann-Wellenhof, 2001, Rothacher, 2004]<br />
2.8 Differenzbildung und Linearkombination<br />
2.8.1 Differenzbildung<br />
Ein Problem der Einzelpunktbestimmung ist die große Anzahl an Unbekannten in den Beobachtungsgleichungen<br />
(s. Abschnitt 2.7.3). Liegen zeitgleiche Beobachtungen von verschiedenen Empfängern<br />
zu mehreren Satelliten vor, ist es möglich durch das Bilden von Beobachtungsdifferenzen (Differenz<br />
der Beobachtungen auf einer Frequenz) einen Teil dieser Unbekannten zu eliminieren. Da zudem die<br />
Entfernung zweier Empfänger zueinander deutlich kleiner ist als die Entfernung eines Empfängers<br />
zum Satelliten, kann davon ausgegangen werden, dass die von den Empfängern registrierten Daten<br />
den annähernd gleichen atmosphärischen Störungen unterliegen. Damit fällt auch ein großer Teil<br />
solcher atmosphärischer Störungen bei der Bildung von Beobachtungsdifferenzen heraus.<br />
Es ist jedoch zu beachten, dass beim Bilden von Differenzen mathematische Korrelationen hervorgerufen<br />
werden, die bei einer strengen Ausgleichung zu berücksichtigen sind.<br />
Im Folgenden werden mögliche Beobachtungsdifferenzen und ihre Auswirkungen nur kurz beschrieben.<br />
Die Beobachtungsgleichungen werden nicht angegeben, sie können den einzelnen Lehrbüchern<br />
entnommen werden.<br />
22
2.8.1.1 Einfachdifferenz (Single Difference)<br />
Satelliten-Einfachdifferenz ist die Differenz der vom Empfänger A zeitgleich registrierten Beobachtungen<br />
zu zwei Satelliten j und k (s. Abb. 2.9 a ).<br />
Durch diese Art der Differenzbildung werden empfängerspezifische Einflüsse eliminiert. Es fällt der<br />
Empfängeruhrfehler und teilweise auch Refraktionseinflüsse aus der Umgebung des Empfängers heraus.<br />
a) b)<br />
Satellit j<br />
Satellit k<br />
Satellit j<br />
Station A<br />
Station A<br />
Station B<br />
Abbildung 2.9: Single Difference<br />
Empfänger-Einfachdifferenz ist die Differenz der von den Empfängern A und B zeitgleich<br />
beobachteten Phasen der Signale des Satelliten j (s. Abb. 2.9 b )<br />
Hierbei wird der Satellitenuhrfehler eliminiert, sowie bei kurzen Basislinen auch atmosphärische Effekte<br />
(troposphärische und ionosphärische Verzögerung) und Satellitenbahnfehler. Die Empfänger-<br />
Einfachdifferenz eliminiert somit die satellitenspezifischen Einflüsse.<br />
2.8.1.2 Empfänger-Satelliten-Doppeldifferenz (Double Difference)<br />
Die Doppeldifferenzen lassen sich bei gleichzeitiger Beobachtung der Satelliten j und k von den<br />
Stationen A und B bilden (s. Abb. 2.10).<br />
Satellit j<br />
Satellit k<br />
Station A<br />
Station B<br />
Abbildung 2.10: Empfänger-Satelliten-Doppeldifferenz (Double Difference)<br />
Die empfänger- und satellitennahen Einflüsse werden durch diese Differenzbildung beseitigt. Das<br />
bedeutet, es fallen Satelliten- und Empfängeruhrfehler wie auch einige systematische Einflüsse heraus.<br />
Dies führt dazu, dass Doppeldifferenzen in der Auswertung von <strong>GPS</strong>-Messungen eine vorrangige Rolle<br />
spielen.<br />
23
2.8.1.3 Dreifachdifferenz (Triple Difference)<br />
Dreifachdifferenzen sind Differenzen der Doppeldifferenzen zu verschiedenen Zeitpunkten (Epochen).<br />
Voraussetzung sind Beobachtungen von zwei Stationen A und B zu zwei Satelliten j und k zu<br />
verschiedenen Zeitpunkten (s. Abb. 2.11).<br />
Satellit j<br />
Satellit k<br />
Station A<br />
Station B<br />
Abbildung 2.11: Dreifachdifferenz (Triple Difference)<br />
Durch die dritte Art der Differenzbildung können zum größten Teil zeitlich konstante Fehlereinflüsse<br />
eliminiert werden (d.h. Fehlereinflüsse, die sich im Zeitraum von zwei Epochen nicht oder nur geringfügig<br />
ändern). Die unbekannten Phasenvielfachen fallen weg und die Dreifachdifferenz ist nur<br />
noch abhängig von der räumlichen Lage der Empfänger. Die Dreifachdifferenz wird besonders zum<br />
Aufdecken von Phasensprüngen (Cycle Slips) eingesetzt.<br />
[Bauer, 2003, Hehl, 2005c, Kahmen, 1997, Korth, 2004, Rothacher, 2004]<br />
2.8.2 Linearkombination<br />
Phasenmessungen mit den Trägern verschiedener Frequenzen (f 1 und f 2 ) lassen sich durch Multiplikation<br />
mit den Faktoren α 1 und α 2 zu einer abgeleiteten Beobachtungsgröße linear kombinieren.<br />
Diese Technik dient einer Modellverfeinerung bei der Aufstellung von Beobachtungsgleichungen und<br />
wirkt sich positiv auf die Auswertung aus. [Kahmen, 1997]<br />
Von der Vielzahl möglicher Linearkombinationen sollen nur einige genannt werden.<br />
Die grundlegende Gleichung <strong>zur</strong> Bildung von Linearkombinationen lautet:<br />
Φ LK = α 1 · Φ L1 + α 2 · Φ L2 (2.23)<br />
wobei α 1 und α 2 frei wählbare Zahlen sind.<br />
Die Frequenz f LK und die Wellenlänge λ LK der Linearkombination ergibt sich aus den beiden Frequenzen<br />
f L1 und f L2 :<br />
f LK = α 1 · f L1 + α 2 · f L2 (2.24)<br />
λ LK =<br />
c<br />
α 1 f L1 + α 2 f L2<br />
(2.25)<br />
24
Es gibt eine Anzahl Kriterien für die Bildung von Linearkombinationen: Wellenlänge, Ionosphäre,<br />
Meßrauschen und Mehrdeutigkeitslösung. Diese bringen jedoch nicht nur Vorteile mit sich, sie führen<br />
auch zu Verschlechterungen in anderen Bereichen (z.B ein größeres Messrauschen), daher ist ihre<br />
Anwendung immer abzuwägen. Im Folgenden sind einige der wichtigsten Linearkombinationen<br />
aufgeführt:<br />
Linear- α 1 α 2 λ LK Nutzen Einschränkung<br />
kombination<br />
[cm]<br />
L 5 , L w , 1 −1 86, 2 dient der Phasenmehr- größeres Messrauschen<br />
wide lane“ deutigkeitsbestimmung,<br />
”<br />
größere Wellenlänge<br />
L n , 1 1 10, 7 dient der Phasenmehr- kürzere Wellenlänge<br />
narrow lane“ deutigkeitsbestimmung,<br />
”<br />
geringeres Messrauschen<br />
L I 1 − f L1<br />
f L2<br />
∞ dient dem Auffinden von Mehrdeutigkeiten sind<br />
Phasensprüngen, nicht ganzzahlig<br />
geometriefrei<br />
L 3 , L c<br />
[Liebsch, 2000]<br />
f 2 L1<br />
f 2 L1 −f2 L2<br />
− f L1f L2<br />
f 2 L1 −f2 L2<br />
19, 0 frei von Ionosphärenein- Mehrdeutigkeiten<br />
flüssen<br />
sind nicht ganzzahlig,<br />
erhöhtes Messrauschen<br />
Darüber hinaus können Linearkombinationen noch zum Glätten von Code-Messungen dienen. Eine<br />
so geglättete Code-Messung wird als ”<br />
Carrier-Smoothed Pseudorange“ bezeichnet.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001, Kahmen, 1997, Korth, 2004]<br />
2.9 Festlegung des Mehrdeutigkeitsparameters der Trägerphase<br />
Konnten die Beobachtungsdaten mit den in Abschnitt 2.5.5 beschriebenen Methoden von Phasensprüngen<br />
befreit bzw. die Phasensprünge einer bestimmten Epoche zugeordnet werden, folgt als<br />
nächster Schritt die Bestimmung des Mehrdeutigkeitsparameters für den Beginn der Messung bzw.<br />
für unkorrigierte Phasensprünge.<br />
Das Lösen des Mehrdeutigkeitsproblems stellt eine der wichtigsten Aufgaben in der geodätischen<br />
Auswertung von <strong>GPS</strong>-Beobachtungen dar. Denn nur wenn die Mehrdeutigkeiten auf ihre korrekten<br />
ganzen Zahlen gesetzt werden können (Ambiguity-Fixed), kann das hohe Genauigkeitspotential der<br />
relativen Positionierung ausgeschöpft werden.<br />
Sind die Mehrdeutigkeiten erst einmal auf ganze Zahlen gesetzt, ist es möglich mit nur einer Epoche<br />
mit 4 Satelliten die Relativpositionen zweier Antennen auf einen Zentimeter genau zu bestimmen;<br />
vorausgesetzt alle anderen Fehlerquellen (Multipath, Bahnen, Atmosphäre) lassen sich genügend gut<br />
modellieren bzw. durch Differenzbildung eliminieren.<br />
Eine Schwierigkeit bei der Mehrdeutigkeitslösung entsteht dadurch, dass Trägerphasen- und Einfachdifferenzbeobachtungen<br />
immer unbekannte konstante Anteile auf Grund der unvollkommenen<br />
Satelliten- und Empfängeruhren enthalten (s. Abschnitt 2.7.2, Gl.(2.18)). Diese Terme sind von den<br />
unbekannten Zyklusvielfachen nicht zu trennen und zerstören die ganzzahlige Natur der Mehrdeutigkeitsbestimmung.<br />
Man behilft sich, indem versucht wird mit Doppeldifferenzen die Mehrdeutigkeitsparameter<br />
gemeinsam mit den geodätischen Parametern zu bestimmen. [Seeber, 1989]<br />
25
Die Mehrdeutigkeiten können jedoch nicht immer auf eine ganze Zahl festgelegt werden. Dies hängt<br />
sehr von folgenden Kriterien ab:<br />
• Satellitengeometrie<br />
• Länge der Session<br />
• Länge der Basislinie (lange Basislinie - große atmosphärische Einflüsse)<br />
• Mehrwegeausbreitung<br />
2.9.1 Code- und Trägerphasenkombination<br />
Für diese Methode werden Code- und Trägerphasenmessungen herangezogen. Die Codes werden<br />
als zusätzliche Welle <strong>zur</strong> Bestimmung der Gesamtstrecke genutzt. Der Grundgedanke besteht darin,<br />
Codemessungen solange durchzuführen, bis das Rauschniveau der Codelösung kleiner ist als die halbe<br />
Wellenlänge der Trägerwelle. [Seeber, 1989]<br />
2.9.2 Geometrische Methode<br />
Die Geometrische Methode lässt sich unterteilen in:<br />
• Lösung aus der Satellitengeometrie<br />
Der Grundgedanke hinter dieser Methode liegt darin, mit möglichst langen Beobachtungszeiten<br />
zu arbeiten. Durch die zeitabhängige Veränderung in der geometrischen Beziehung von Satellit<br />
zu Empfänger während der Beobachtungszeit entstehen Beobachtungsgleichungen, welche<br />
numerisch stabil gelöst werden können.<br />
• Lösung aus der Empfängergeometrie<br />
– bei Kenntnis der Empfänger-Koordinaten<br />
– durch Empfängertausch<br />
Diese beiden Varianten können bei den Grönlandmessungen nicht realisiert werden.<br />
2.9.3 Suchalgorithmen<br />
Bei dieser Methode geht man prinzipiel in drei Schritten vor:<br />
1. Die Mehrdeutigkeiten werden als reelle Zahlen bestimmt. Dies kann mit der Methode der<br />
kleinsten Quadrate oder durch die Auswertung von Codemessungen erfolgen. Als Ergebnis<br />
erhält man reellwertige Mehrdeutigkeiten und Angaben zu deren Genauigkeit (mittlere Fehler).<br />
2. Mit der Hilfe geeigneter Algorithmen und unter Verwendung der Ergebnisse aus dem ersten<br />
Schritt werden den Mehrdeutigkeiten nun ganze Zahlen zugeordnet. Die Mehrdeutigkeiten sind<br />
nun fixiert. Bei der Bestimmung der richtigen Zuordnung kommen diverse statistische Tests<br />
zum Zuge.<br />
3. Die ganzzahligen Mehrdeutigkeiten gelten nun als bekannt und es wird mit ihnen eine<br />
Ambiguity-Fixed Lösung für die verbleibenden Parameter (insbesondere die Stationskoordinaten)<br />
berechnet.<br />
26
Um den Mehrdeutigkeiten ganzzahlige Werte zuzuordnen kommen Suchalgorithmen zum Einsatz<br />
(z.B. FARA (Fast Ambiguity Resolution Approach) oder Ambiguity-Function-Methode) welche alle<br />
möglichen Kombinationen in der Umgebung der reellen Werte absuchen und testen. Ihre Vorgehensweise<br />
ist wie folgt:<br />
• Es wird ein Suchraum festgelegt in dem die korrekte ganzzahlige Lösung zu finden ist. Die<br />
Größe und Lage des Suchraums wird durch die reellwertigen Mehrdeutigkeiten aus Schritt 1<br />
und durch ihre Genauigkeiten bestimmt.<br />
• Alle durch diesen Suchraum bestimmten Kombinationsmöglichkeiten der Mehrdeutigkeiten<br />
müssen getestet werden.<br />
• Die beste Kombination wird als richtig akzeptiert, falls sie sich qualitativ deutlich von der<br />
zweitbesten Kombination unterscheidet (statistische Tests).<br />
Die größten Probleme dieses Ansatzes liegen in der richtigen Dimensionierung des Suchraums, der<br />
großen Anzahl an durchzuführenden Berechnungen und der sicheren Identifizierung der richtigen<br />
Lösung.<br />
2.9.4 Mehrdeutigkeitslösung ”<br />
on the fly“<br />
Mit einer Mehrdeutigkeitslösung ”<br />
on the fly“ bezeichnt man eine Bestimmung für den bewegten Fall.<br />
Die vorherige Initialisierung entfällt. Die Suchmethoden unterscheiden sich nicht grundsätzlich von<br />
den bereits genannten.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001, Korth, 2004, Leica, 2000, Rothacher, 2004, Seeber, 1989] 4<br />
2.10 <strong>GPS</strong>-Messverfahren<br />
Will man eine Übersicht über alle gängigen <strong>GPS</strong>-Messverfahren geben, wird man schnell feststellen,<br />
dass es so etwas wie eine allgemeine Festlegung nicht gibt. Wie auch in allen anderen Bereichen so<br />
ändern sich auch hier die Definitionen mit der Zeit. War vor einigen Jahren der Ausdruck ”<br />
D<strong>GPS</strong>“<br />
noch die Bezeichnung für ”<br />
Differentielles <strong>GPS</strong> in der Vermessung“, so wird er heutzutage mit<br />
Navigation in Verbindung gebracht.<br />
Der von mir in Abbildung 2.12 dargestellte hierarchische Überblick über die <strong>GPS</strong>-Messverfahren ist<br />
nur eine Möglichkeit der Gliederung. Er entstand durch Diskussion mit Mitarbeitern der TFH und<br />
in Übereinstimmung mit den meisten gängigen Lehrbüchern. Bei der Beschreibung der einzelnen<br />
Unterpunkte werden die Begriffe ”<br />
differenziell“ und ”<br />
relativ“ synonym verwendet. Die Übersicht ist<br />
auch als eine Art Definition im Rahmen dieser Arbeit gedacht um Unklarheiten bei der Benutzung<br />
der Begriffe zu vermeiden.<br />
2.10.1 Navigation<br />
Allgemein sind die Anforderungen der Navigation an die Genauigkeit der Positionsbestimmung erheblich<br />
geringer als im Bereich der Vermessung. Daher kommt hier lediglich die Auswertung des C/A<br />
Codes zum tragen, was uns erlaubt mit günstigeren Einfrequenzempfängern (L 1 ) zu arbeiten.<br />
4 http://www.leica-geosystems.com, April 2005<br />
27
<strong>GPS</strong><br />
Navigation<br />
Auswertung der Codephase<br />
Vermessung<br />
Differentielles <strong>GPS</strong> mit<br />
Auswertung der Trägerphase<br />
Einzelpunktbestimmung<br />
D<strong>GPS</strong><br />
Statisch<br />
Kinematisch<br />
Static<br />
Fast Static<br />
Postprocessing<br />
- Kontinuierlich<br />
- STOP & GO<br />
- ...<br />
RTK<br />
- Kontinuierlich<br />
- STOP & GO<br />
- ...<br />
Abbildung 2.12: Übersicht der <strong>GPS</strong> Messverfahren<br />
Man kann in der Navigation unterscheiden zwischen:<br />
• Einzelpunktbestimmung<br />
Für die Ortung im absoluten Modus reicht im einfachsten Fall ein Handgerät mit integrierter<br />
Antenne und Stromversorgung aus. Die Ortungsgenauigkeit liegt bei etwa 10 Meter.<br />
• D<strong>GPS</strong><br />
Relative <strong>GPS</strong>-Positionierung mit einer Referenzstation. Beim differenziellen <strong>GPS</strong> (D<strong>GPS</strong>) werden<br />
Code-Korrekturen für die Beobachtungen auf der ersten <strong>GPS</strong>-Frequenz übertragen. Als<br />
Datenformat hat sich international das RTCM-Format durchgesetzt. Durch Anbringen der entsprechenden<br />
Korrekturen gelingt eine Elimination der Satellitenuhrfehler und eine Verringerung<br />
der ionosphärischen Laufzeitfehler und Orbitfehler. Die erzielbare Genauigkeit liegt bei etwa<br />
0,5-1,0 Meter.<br />
2.10.2 Vermessung<br />
Im vermessungstechnischen Bereich können Genauigkeiten von einigen Dezimetern nicht mehr den<br />
Anforderungen genügen. Spricht man daher von <strong>GPS</strong> in Bezug auf vermessungstechnische Anwendungen,<br />
so ist darunter immer differentielles <strong>GPS</strong> mit Auswertung der Trägerphase zu verstehen.<br />
Durch Differenzbildung wird es möglich Fehlereinflüsse zu eliminieren und Mehrdeutigkeiten zu lösen<br />
(s. Abschnitt 2.8.1) um so eine Genauigkeit von wenigen Zentimetern bis einigen Millimetern zu<br />
erreichen.<br />
Generell kommen in der Vermessung nur Zweifrequenzempfänger zum Einsatz. Dadurch wird es<br />
möglich Einflüsse, die bei der Signalausbreitung in der Atmosphäre entstehen (s. Abschnitt 2.5),<br />
weitgehend zu eliminieren.<br />
Dabei wird hier nicht näher auf die Unterscheidung zwischen Messungen mit einer Referenzstation<br />
und Messungen in einem Referenzstationsnetz eingegangen, da für den Nutzer die Handhabung einer<br />
realen und einer virtuellen Referenzstation gleich ist.<br />
28
2.10.2.1 Statische Messverfahren<br />
Sofern höchste Koordinatengenauigkeiten gefordert werden kommt nur ein statisches Beobachtungsverfahren<br />
in Frage. Die Auswertung erfolgt in nahezu allen Fällen im Postprocessing unter Verwendung<br />
präziser Ephemeriden.<br />
Das Verfahren ist dadurch charakterisiert, dass sich die beteiligten Satelliten-Empfänger während der<br />
Datenregistrierung in Ruhe befinden und nach Abschluss der Beobachtungszeit ausgeschaltet werden.<br />
Die Messungen auf den einzelnen Punkten erfolgen simultan und es kann davon ausgegangen<br />
werden, dass von allen Punkten die gleichen Satelliten beobachtet werden können. Werden aus den<br />
simultanen Beobachtungen auf zwei Standpunkten hochgenaue 3-D-Koordinatendifferenzen zwischen<br />
den Empfängerstandpunkten bestimmt, nennt man dies Basislinienbeobachtung.<br />
Die Genauigkeit steht unter anderem in Zusammenhang mit der Länge der Basislinie und kann mit<br />
1,0-0,1 ppm für Basislinien bis zu einigen 100 km angegeben werden [Hofmann-Wellenhof, 2001].<br />
In der Literatur findet sich häufig noch folgende weitere Unterteilung des Statischen Verfahrens in:<br />
• Langzeitstatische Beobachtungen (Static):<br />
– Es wird so lange beobachtet, bis man die Koordinaten der Punkte (und die Mehrdeutigkeiten)<br />
mit genügender Genauigkeit bestimmt hat (gewöhnlich > 1 Stunde).<br />
– Oft werden mehrere Empfänger parallel betrieben und es wird im Postprocessing eine<br />
Netzwerklösung gerechnet.<br />
– Bei grösseren Punktentfernungen wird die ionosphärenfreie Linearkombination ausgewertet<br />
(Zweifrequenzempfänger nötig).<br />
– Grundsätzlich gilt: Je genauere Resultate man anstrebt, desto länger muss man beobachten.<br />
• Kurzzeitstatische Beobachtungen (Rapid Static oder Fast Static):<br />
– Einsatz einer Referenzstation und eines oder mehrerer Rover, die nacheinander die zu<br />
vermessenden Punkte besuchen.<br />
– Beobachtung der Punkte über einen Zeitraum von wenigen Minuten. Dabei müssen<br />
Suchalgorithmen für die Ambiguity Resolution verwendet werden (s. Abschnitt 2.9.3).<br />
– Pro Epoche sollten mindestens 5-6 Satelliten beobachtet werden.<br />
– Oft werden <strong>zur</strong> Kontrolle schon beobachtete Punkte wieder besetzt. Diese Wiederbesetzungen<br />
sind sehr hilfreich für die Ambiguity Resolution (Konstellationsänderung zwischen<br />
den Besetzungen)<br />
[Rothacher, 2004]<br />
2.10.2.2 Kinematische Messverfahren<br />
Bei kinematischen Beobachtungsverfahren muss davon ausgegangen werden, dass Koordinatengenauigkeiten<br />
unter 1 cm nicht erreichbar sind.<br />
Bei dem Verfahren befindet sich ein Satellitenempfänger während der Datenregistrierung in Ruhe<br />
(Referenzstation, Basis) während sich die sonstigen beteiligten Satellitenempfänger (Rover) in Bewegung<br />
befinden. Die hohe Koordinatengenauigkeit lässt sich nur erreichen, wenn es nach anfänglicher<br />
Bestimmung der Phasenmehrdeutigkeiten während der gesamten Messung nicht zu einem Verlust<br />
von Satellitensignalen kommt und somit die Phasenmehrdeutigkeiten wieder unbestimmt sind (Loss<br />
of Lock). Das heißt, sowohl auf der Referenzstation als auch am Rover müssen über den gesamten<br />
Messzeitraum ununterbrochen Signale von mindestens vier (besser mehr) Satelliten empfangen<br />
werden.<br />
29
Die Auswertung kann im Postprocessing oder in Echtzeit (RTK) erfolgen. Bei der Auswertung im<br />
Postprocessing können zusätzliche Informationen über die Qualität der Messung gewonnen werden<br />
und es besteht die Möglichkeit das Ergebnis zu optimieren.<br />
Kinematische Vermessungen sind sehr produktiv, da bei ihnen eine große Anzahl von Punkten in sehr<br />
kurzer Zeit bestimmt werden kann.<br />
RTK Unter dem Begriff Real-Time Kinematic (RTK) hat sich die Echtzeit-Positionierung unter<br />
Verwendung der Phasendaten durchgesetzt. Im Gegensatz zu D<strong>GPS</strong> werden neben den Einfrequenz-<br />
Codeinformationen auch Phaseninformationen übertragen und nach Bestimmung der Phasenmehrdeutigkeiten<br />
zentimetergenaue Nutzerpositionen erreicht. Für eine schnelle Mehrdeutigkeitslösung<br />
werden im Allgemeinen von der Referenzstation Zweifrequenz-Phasendaten ausgesendet. Die rasche<br />
Mehrdeutigkeitslösung und damit das Erreichen von Zentimetergenauigkeit gelingt im Allgemeinen<br />
nur bis zu einer Entfernung <strong>zur</strong> Referenzstation von maximal einigen Kilometern, da darüber hinaus<br />
die verwendete Modellierung oft nicht mehr genügt.<br />
Da die Daten oder Korrekturen der Referenzstation per Datenfunk oder GSM (Mobiltelefon) an die<br />
Roverstation übertragen werden, ergibt sich hieraus eine weitere Begrenzung der Reichweite. Als<br />
Formate <strong>zur</strong> Datenübertragung werden neben RTCM meist eigene Formate der Gerätehersteller verwendet,<br />
welche eine weitere Datenkomprimierung zulassen.<br />
Das Genauigkeitspotential von RTK-Vermessungen liegt in der Genauigkeitsgrößenordnung von 1-<br />
2 cm. Diese Genauigkeit wird aber nur erreicht, wenn es gelingt die Phasenmehrdeutigkeiten korrekt<br />
zu lösen.<br />
Post Processing Die Auswertung von kinematischen <strong>GPS</strong>-Beobachtungsdaten im Nachhinein erfolgt<br />
im Allgemeinen nur für zentimetergenaue Anwendungen, bei denen die Lösung der Phasenmehrdeutigkeiten<br />
notwendig ist. Vor Einführung von RTK, war die Postprocessing-Auswertung die<br />
einzige Möglichkeit, zentimetergenaue Koordinaten zu erzielen. Heute wird sie insbesondere noch bei<br />
Entfernungen von mehr als einigen Kilometern angewandt oder, wenn keine direkte Kommunikationsverbindung<br />
zwischen Referenzstation und Nutzer möglich ist. [Bauer, 2003]<br />
Durch verschiedene Verfahren gelingt bei einer Auswertung im Postprocessing die Bestimmung<br />
der Phasenmehrdeutigkeiten besser als bei einer Real-Time Auswertung. So können hierbei präzise<br />
Ephemeriden und Ionosphärenmodelle verwendet werden oder aber eine Auswertung in kurzen<br />
Zeitabständen ist möglich.<br />
Kontinuierliche Messung oder STOP & GO Nach Art der Durchführung der Beobachtungen<br />
kann man das kinematische Messverfahren noch weiter unterteilen. Hierbei kann die Auswertung<br />
sowohl in Echtzeit auch als im Postprocessing erfolgen:<br />
• Kontinuierliche kinematisches Beobachtungsverfahren<br />
Der Empfänger ist in permanenter Bewegung. Es wird ununterbrochen die Bahn der Empfängerantenne<br />
eingemessen. Die Anzahl der zu registrierenden Punkte kann bestimmt werden durch:<br />
– Zeitinkrement<br />
Nach Ablauf eines bestimmten Zeitintervalls ∆t wird ein Punkt registriert.<br />
– Weginkrement<br />
Es wird ein Punkt registriert, sobald er Empfänger eine vorbestimmte Entfernung ∆s vom<br />
letzten Speicherpunkt erreicht.<br />
– Schlauchinkrement<br />
Es wird ein Punkt registriert, sobald der Empfänger einen vorbestimmten seitlichen Abstand<br />
∆d von der, durch die letzten beiden Speicherpunkte definierten Gerade erreicht.<br />
30
• STOP & GO Verfahren<br />
Der Empfänger verweilt für wenige Minuten auf dem Punkt und registriert dort für wenige<br />
Messepochen die Satellitendaten. Danach wird der nicht ausgeschaltete und weiter Daten registrierende<br />
Empfänger zum nächsten Punkt transportiert. Dort registriert er wieder für wenige<br />
Minuten die Satellitendaten.<br />
Zwar ist die Genauigkeit der Punktkoordinate, welche in einer Epoche gewonnen wird, nicht<br />
höher als beim kontinuierlichen Verfahren, jedoch kann unter guten äußeren Bedingungen<br />
durch eine Mittelbildung aller über einen Zeitraum auf diesem Punkt registrierten Epochen<br />
eine Punktgenauigkeit von 1-2 cm (Lagegenauigkeit) erreicht werden.<br />
Bestimmung der Phasenmehrdeutigkeiten Um beim kinematischen Messverfahren Lagegenauigkeiten<br />
in Zentimetergenauigkeit zu erreichen, ist es notwendig, die Mehrdeutigkeitsparameter der<br />
Trägerphase zu bestimmen. Will man Koordinaten in Real-Time bestimmen, ist eine Lösung der<br />
Mehrdeutigkeiten in einer sogenannten Initialisierungsphase vor Beginn der eigentlichen Messung<br />
notwendig. Die verschiedenen Verfahren sind in Abschnitt 2.9 aufgeführt.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001, Korth, 2004, Rothacher, 2004]<br />
2.11 Virtuelle Referenzstation (VRS)<br />
Die durch die Ionosphäre bedingten Laufzeitfehler stellen die bedeutendsten Fehlereinflüsse bei der<br />
relativen Positionierung mit <strong>GPS</strong> dar. Zwar können sie bei Zweifrequenzmessungen durch die Bildung<br />
von ionosphärenfreien Linearkombinationen weitgehend eliminiert werden, jedoch führt dies zu<br />
anderen negativen (Fehler-) Einflüssen (stärkeres Messrauschen, verstärkte Mehrwegeinflüsse, keine<br />
ganzzahligen Mehrdeutigkeiten).<br />
Hauptproblem bei der relativen Positionierung sind die Unterschiede der ionosphärischen Laufzeitfehler<br />
der Signale eines Satelliten auf dem Weg zu den zwei beteiligten Stationen. Solche relativen<br />
ionosphärischen Laufzeitfehler treten auch bei einer ungestörten Atmosphäre durch die unterschiedlichen<br />
Elevationen, unter denen die Satellitensignale empfangen werden, und die großräumigen horizontalen<br />
Gradienten des Elektronengehalts auf. Bei einer gestörten Ionosphäre kommt es schon ab<br />
wenigen Kilometern Stationsabstand zu relativ großen ionosphärischen Laufzeitfehlern.<br />
Eine Möglichkeit die ionosphärischen Laufzeitfehler zu minimieren, ist die Methode der relativen Positionierung<br />
mit Hilfe verhältnismäßig kurzer Basislinien, da hierbei die Wirkung der Ionosphäre auf die<br />
simultan gemessenen Beobachtungen so ähnlich ist, dass sie bei einer Differenzbildung nahezu ganz<br />
herausfällt. Hierzu dient das Konzept der Virtuellen Referenz Station (VRS). Liegen simultane Beobachtungen<br />
von mindestens drei Referenzstationen vor, können diese zusammengeführt und vorverarbeitet<br />
werden. Unter Berücksichtigung der Nährungsposition des Rovers werden die Korrekturanteile<br />
zu satellitenindividuellen Beobachtungskorrekturen zusammengesetzt. So können Korrekturen einer<br />
VRS oder virtuelle Beobachtungen gerechnet werden.<br />
Sollen die Auswertungen für zentimetergenaue relative Positionierung verwendet werden, d.h. werden<br />
als primäre Beobachtungsgröße Phasenmessungen verwendet, müssen in einem Vorverarbeitungsschritt<br />
die Phasenmehrdeutigkeiten aller beteiligen Referenzstationen auf ihren wahren ganzen Wert<br />
festgesetzt werden. Sollte es nicht gelingen die Mehrdeutigkeiten einer Station zu lösen, müssen die<br />
Beobachtungen der betreffenden Station von der weiteren Verarbeitung ausgeschlossen werden. Da<br />
die Koordinaten der beteiligten Referenzstationen oftmals als genaue Werte vorliegen, müsste dies<br />
verhältnismäßig schnell gelingen. Andererseits beschränken entfernungsabhängige Fehlereinflüsse die<br />
komplette Bestimmung aller Mehrdeutigkeiten meist auf Entfernungen der Referenzstationen von<br />
50-100 km zueinander [Wanninger, 1999].<br />
31
Nach der erfolgreichen Beseitigung aller Mehrdeutigkeiten können Korrekturmodelle für die entfernungsabhängig<br />
wirkenden Fehlereinflüsse aus den Phasenbeobachtungen berechnet werden. Es wird<br />
unterschieden zwischen dem ionosphärischen Modell, welches auf Grundlage der ionosphärischen Linearkombination<br />
die Fehlereinflüsse der Ionosphäre erfasst, und dem geometrischen Modell, welches<br />
auf Grundlage der ionosphärenfreien Linearkombination die Orbitfehlereinflüsse und die troposphärischen<br />
Laufzeitfehler beinhaltet.<br />
Im einfachsten Fall werden Ebenen genutzt um die relativen Fehlereinflüsse zu beschreiben. Hierzu<br />
benötigt man mindestens drei Referenzstationen (s. Abb. 2.13). Werden vier oder mehr Stationen<br />
verwendet, muss eine ausgleichende Ebene gefunden werden.<br />
Double-<br />
Difference<br />
Residuals<br />
Breite<br />
R2<br />
R3<br />
R1<br />
Länge<br />
Abbildung 2.13: Fehlermodellierung durch lineare Interpolation [Wanninger, 2000b]<br />
Jede solche Ebene wird bestimmt durch zwei Parameter, ihre Neigung in zwei definierte Richtungen,<br />
z.B. in Nord-Süd- und in Ost-West-Richtung. Diese werden auch als Flächenkorrekturparameter<br />
(FKP) bezeichnet. Aus Messungen lässt sich erkennen, dass die ionosphärischen FKP im Allgemeinen<br />
größere und kurzperiodischere Variationen aufweisen als die geometrischen FKP.<br />
Mit Hilfe dieser FKP können nun Korrekturen für (Code-) und Phasenbeobachtungen von der Position<br />
der Referenzstation auf die Näherungsposition des Nutzers übertragen werden. Die Position des<br />
Nutzers wird dann zweckmäßig relativ zu einer VRS berechnet, deren Beobachtungsdaten aus den Beobachtungen<br />
der Referenzstationen unter Verwendung der Korrekturmodelle erzeugt werden. Da der<br />
Abstand zwischen Näherungsposition des Nutzers, also der Position der VRS, und der tatsächlichen<br />
Position des Nutzers relativ gering ist, gelten die angebrachten Korrekturen auch für die tatsächlichen<br />
Beobachtungen auf der Nutzerstation.<br />
Beobachtungen von<br />
realen Referenzstationen<br />
Stationskoordinaten der<br />
realen Referenzstationen<br />
Bahninformationen<br />
Mehrdeutigkeitslösung, Korrekturmodelle aufstellen<br />
Nährungskoordinaten<br />
des Rovers<br />
Beobachtungskorrekturen<br />
der realen Referenzstationen<br />
Flächenkorrekturparameter<br />
Stationskoordinaten der<br />
Virtuellen Referenzstation<br />
Berechnung der virtuellen Beobachtungen<br />
Beobachtungen einer<br />
Virtuellen Referenzstation<br />
Abbildung 2.14: Berechnung der Beobachtungen einer Virtuellen Referenzstation [Wanninger, 2002b]<br />
32
Dies ist natürlich nur richtig für statische oder kleinräumige kinematische Vermessungen, bei denen<br />
eine VRS <strong>zur</strong> Berechnung aller Positionierungsarbeiten ausreichend ist. Bewegt sich der Nutzer über<br />
größere Entfernungen, muss mit einer halbkinematischen VRS gearbeitet werden [Wanninger, 2002b].<br />
Nun kann, wie bei einer realen Basisstation, eine basislinienweise Auswertung mit Hilfe der Virtuellen<br />
Referenzstation erfolgen. Die nahezu identischen Fehlereinflüsse fallen dabei durch Differenzbildung<br />
heraus und es gelingt eine gute Mehrdeutigkeitslösung.<br />
Bisher wurde die Methode der Virtuellen Referenzstation allerdings nur für Gebiete Mitteleuropas<br />
angewendet, in denen es vorrangig zu mittelgroßen Störungen der Ionosphäre kommt. Diese Störungen<br />
haben eine Größenordnung um die 100 km mit einer scheinbaren Periode von zehn Minuten bis<br />
zu einer Stunde. Zur Verwendung in polaren Gebieten liegen noch keine Erkenntnisse vor. Auch ist<br />
es fraglich, ob die Methode zum Einsatz bei Referenzstationen erweiterbar ist, die mehrere hundert<br />
Kilometern voneinander entfernt sind. Dabei kann natürlich nicht mehr mit einer Genauigkeit im<br />
Subzentimeterbereich gerechnet werden.<br />
[Bauer, 2003, Huck, 2004, Wanninger, 1999, Wanninger, 2000b, Wanninger, 2002b]<br />
2.12 Alternative Verfahren<br />
Die Alternativen Verfahren, die neben <strong>GPS</strong> <strong>zur</strong> Bestimmung von Eisbewegungsparametern zum Einsatz<br />
kommen, lassen sich in zwei Gruppen einteilen.<br />
• Klassische Polygonierung und Nivellement<br />
• Fernerkundungsverfahren<br />
Die klassische Polygonierung wird nur noch selten angewendet und wurde in der Vergangenheit durch<br />
den Einsatz von <strong>GPS</strong> nahezu ersetzt.<br />
Die Fernerkundungsverfahren stellen dagegen eine wirkliche Alternative zu <strong>GPS</strong> dar. Mit ihnen steht<br />
der glaziologischen Modellierung ein Werkzeug <strong>zur</strong> flächenhaften Bestimmung von Bewegung und<br />
Oberflächentopographie großer Eisflächen mit einer Genauigkeit von wenigen Metern pro Jahr <strong>zur</strong><br />
Verfügung [Joughin, 1996].<br />
Der Nachteil ist, dass mittels Fernerkundungsverfahren nur Bewegungen relativ zu benachbarten<br />
Punkten bestimmt werden können. Es sind Punkte bestimmter Geschwindigkeit erforderlich, von<br />
denen aus die flächenhafte Bewegungsbestimmung gezählt werden kann. Dafür sind geodätische<br />
Bodenmessungen an ausgewählten Punkten unverzichtbar.<br />
[Korth, 1998]<br />
33
Kapitel 3<br />
Besonderheiten des Projekts -<br />
Grundlegende Festlegungen<br />
3.1 Örtliche Gegebenheiten<br />
3.1.1 Eisbewegungen<br />
Eis ist ein plastisches Medium. Es besitzt Fließeigenschaften und kann durch Eisbewegungsparameter<br />
beschrieben werden.<br />
Die einfachste Möglichkeit der Beschreibung von Lage und Bewegung eines Gletscheroberflächenpunktes<br />
P besteht in der Zuweisung eines Ortsvektors x, dessen Ableitung nach der Zeit ẋ und des<br />
ebenfalls zeitlich veränderlichen Potentialwertes W (t) <strong>zur</strong> Höhenfestlegung:<br />
P (x, ẋ, W (t)) mit x = (x, y, z) T und ẋ = v = (ẋ,ẏ, ż) T<br />
Insbesondere bei schnell fließenden Eisströmen kommt es auch zu beschleunigten Bewegungen bei<br />
gleichzeitiger Verringerung der Eisdicke. Das Modell der geradlinig gleichförmigen Bewegung stellt<br />
jedoch oft eine ausreichende Annäherung an die realen Verhältnisse dar und meist reichen die aus<br />
den Messungen gewonnenen Informationen für kompliziertere Modelle nicht aus. [Korth, 1998]<br />
Eismassen sind in ständiger Bewegung. Um Eisbewegungen mittels <strong>GPS</strong> zu erfassen ist es grundsätzlich<br />
sinnvoll die ungefähre Bewegungsrichtung und deren ungefähren Betrag zu kennen. Damit ist<br />
es bei einer Auswertung möglich das geeignete Verfahren zu wählen, die Resultate besser zu deuten<br />
und unlogische Ergebnisse zu erkennen.<br />
Grönland ist mit einer dicken Eisschicht bedeckt. Eismassen im Inland bewegen sich auf Grund<br />
des Drucks der großen auflastenden Massen. Die Eismassen an den Küsten Grönlands fließen über<br />
Gletscher in östlicher und westlicher Richtung in die Fjorde ab. Je näher man der Küste kommt,<br />
umso größer ist die Bewegung. Zentrale Punkte auf dem Inlandeis zeigen nur eine sehr langsame<br />
horizontale Bewegung, versinken jedoch im Eis.<br />
Für die Bestimmung der Bewegungsparameter stehen in Grönland kontinuierliche Daten über 10-12<br />
Stunden <strong>zur</strong> Verfügung. Um aus diesen kurzzeitigen Messungen auf jährliche Parameter schließen zu<br />
können, muss eine kontinuierliche Bewegung vorliegen. Dies kann nur für das Inlandeis angenommen<br />
werden. In den küstennahen Regionen Grönlands ist die Geschwindigkeit der Bewegung von der<br />
Temperatur bzw. dem Grad des Schmelzens abhängig.<br />
34
Die Größe der zu erwartenden Bewegungen pro Jahr liegt zwischen einigen Metern im Inland und<br />
wenigen Kilometern an der Küste.<br />
Die Richtung der zu erwartenden Bewegung kann theoretisch aus Karten oder Satellitenbildern mit<br />
Höhenlinien entnommen werden, da das Eis sich im Normalfall talwärts bewegt. Der Höhengrat<br />
Grönlands erstreckt sich ungefähr in Nord-Süd-Richtung, somit ist mit einer Eisbewegung in Ost-<br />
West-Richtung zu rechnen.<br />
[Korth, 1998]<br />
3.1.2 Atmosphärische Einflüsse<br />
3.1.2.1 Troposphäre<br />
Die Universität Karlsruhe führte, auf Grundlage von bei Polarexpeditionen gewonnenen Daten, verschiedene<br />
Untersuchungen <strong>zur</strong> Modellierung der Troposphäre durch. Hierbei wurden gerade Beobachtungen<br />
von Satelliten mit einer niedrigen Elevation (
3.1.2.3 Sonnenaktivität<br />
Die Sonne ist der Ursprung des Sonnenwindes, einem Strom von Gasen der Sonne, welche die Erde<br />
mit Geschwindigkeiten von mehreren hundert Kilometern in der Sekunde erreichen. Der Sonnenwind<br />
strömt nicht gleichförmig. Obwohl seine Ausbreitungsrichtung immer vom Zentrum der Sonne nach<br />
Außen gerichtet ist, ändert er seine Geschwindigkeit und Intensität und führt mitunter magnetische<br />
Wolken mit sich. Ein Indikator für die Sonnenaktivität und somit für die Aktivität des Sonnewindes<br />
ist die Anzahl sogenannter Sonnenflecken. Sonnenflecken sind Punkte, an denen besonders starke<br />
magnetische Linien durch die Oberfläche der Sonne brechen. 3<br />
Veränderungen des Sonnenwindes, bei großer Intensität auch als Sturm bezeichnet, führen zu Störungen<br />
am Magnetfeld der Erde. Die geladenen Teilchen der Atmosphäre wiederum stehen in Wechselwirkung<br />
zum Magnetfeld der Erde. Somit steht die Sonnenaktivität in indirekter Beziehung zu den<br />
Einflüssen, welche die Ionosphäre auf Satellitensignale ausübt. Stürme auf der Sonne führen daher<br />
auch zu Stürmen in der Ionosphäre der Erde. Dies ist bei der Wahl der geeigneten Aufzeichnungsrate<br />
zu beachten (s. Abbschnitt 3.2.4).<br />
Abbildung 3.1: Die Anzahl der Sonnenflecken dient als Maß für die Sonneaktivität (Nasa)<br />
Die Aktivität der Sonne läuft in Zyklen ab, ein Zyklus dauert etwa 11 Jahre. Wie man in Abbildung<br />
3.1 erkennen kann, trat das letzte Maximum im Jahr 2001 auf. Für die Auswertung der Grönlandmessungen<br />
von 2002 ist somit mit einem starken Einfluss der Ionosphäre zu rechnen. Die Auswirkungen<br />
auf eine angedachte Folgemessung im Jahr 2006 wären dagegen wesentlich geringer.<br />
Die Möglichkeit die Einflüsse der Ionosphäre dadurch zu reduzieren, dass die Messungen in die<br />
Nachtstunden verlegt werden, war in Grönland nicht gegeben, da im polaren Sommer die Sonne<br />
nicht untergeht.<br />
3.1.3 Abschattung<br />
Abschattungen müssen in Grönland nicht beachtet werden, da es sich um ein relativ flaches Gebiet<br />
handelt und keine Sichthindernisse den Satellitenempfang behindern.<br />
3 http://science.msfc.nasa.gov/ssl/pad/, Mai 2005<br />
36
3.1.4 Mehrwegeausbreitung<br />
Mehrwegeausbreitung tritt in Polaren Regionen verstärkt auf, da die Satellitensignale an der Schneeoberfläche<br />
relativ gut reflektiert werden. Da es jedoch in diesen Gebieten keine Gebäude oder andere<br />
hohe Objekte gibt, treffen die reflektierten Strahlen die Antenne nur von unten. Hiergegen ist die<br />
verwendete Trimble Zephyr-Antenne jedoch durch ihre Bodenplatte relativ gut geschützt.<br />
3.1.5 Deklination<br />
Da der magnetische Nordpol nicht mit dem geographischen Nordpol zusammenfällt, zeigt eine Magnetnadel<br />
nicht genau nach Norden, sondern in die Richtung des magnetischen Meridians, die in der<br />
geodätischen Praxis kurz als Magnetisch Nord bezeichnet wird. Der Winkel δ, den die Richtungen<br />
nach Magnetisch Nord und nach Geographisch Nord miteinander bilden, heißt Deklination.<br />
Das Messgebiet liegt in direkter Nähe zum magnetischen Nordpol, der sich nur wenige hundert<br />
Kilometer entfernt in Nordkanada befindet und seine Lage permanent verändert. Auf Grund dieser<br />
Lage ist in Grönland eine sehr große Deklination vorzufinden, die auf der großen Ausdehnung der<br />
Expeditionsroute unterschiedliche Werte annimmt. Für die Nutzung eines Kompasses ist es sinnvoll,<br />
zusätzlich zum Azimut den magnetischen Azimut anzugeben.<br />
Camp δ westl. Camp δ westl. Camp δ westl.<br />
05 27 ◦ 28 ′ 17 29 ◦ 48 ′ 29 33 ◦ 14 ′<br />
06 27 ◦ 38 ′ 18 30 ◦ 03 ′ 30 33 ◦ 35 ′<br />
07 27 ◦ 49 ′ 19 30 ◦ 18 ′ 31 33 ◦ 58 ′<br />
08 27 ◦ 58 ′ 20 30 ◦ 35 ′ 32 34 ◦ 20 ′<br />
09 28 ◦ 08 ′ 21 30 ◦ 54 ′ 33 34 ◦ 43 ′<br />
10 28 ◦ 16 ′ 22 31 ◦ 12 ′ 34 35 ◦ 03 ′<br />
11 28 ◦ 28 ′ 23 31 ◦ 29 ′ 35 35 ◦ 30 ′<br />
12 28 ◦ 36 ′ 24 31 ◦ 45 ′ 36 35 ◦ 48 ′<br />
13 28 ◦ 47 ′ 25 32 ◦ 05 ′ 39 36 ◦ 28 ′<br />
14 29 ◦ 0 ′ 26 32 ◦ 20 ′ KA 33 ◦ 49 ′<br />
15 29 ◦ 15 ′ 27 32 ◦ 34 ′ KU 26 ◦ 16 ′<br />
16 29 ◦ 31 ′ 28 32 ◦ 53 ′<br />
Tabelle 3.1: Magnetische Deklination - Sommer 2006<br />
Die in Tabelle 3.1 angegeben Deklinationen wurden für Sommer 2006, den Zeitpunkt der Folgeexpedition,<br />
bestimmt. Die Berechnung erfolgte mit dem Programm Geomag 5.2 4 auf Grundlage des<br />
aktuellen von der International Association of Geomagnetism and Aeronomy 5 (IAGA) herausgegebenen<br />
International Geomagnetic Reference Field 6 (IGRF-10).<br />
4 http://www.ngdc.noaa.gov/IAGA/vmod/geomag v5.2.exe, Juni 2005<br />
5 http://www.iugg.org/IAGA/, Juni 2005<br />
6 http://www.ngdc.noaa.gov/IAGA/vmod/igrf.html, Juni 2005<br />
37
3.2 Messkonstellation<br />
3.2.1 Lange Basislinien<br />
Da das Inland Grönlands komplett mit einem Panzer aus Schnee und Eis überzogen ist, können<br />
Festpunkte nur an der eisfreien Küste vermarkt werden. Dies führt zu Basislinien die im Minimum<br />
100 km, im Maximum beinahe 700 km betragen. Um <strong>GPS</strong> auswerten zu können ist es notwendig<br />
von beiden Endpunkten der Basislinie mindestens vier identische Satelliten zu beobachten. Zwar gibt<br />
es in Grönland keine Probleme durch Abschattung, jedoch ergeben sich durch die Erdkrümmung<br />
Einschränkungen der Sichtbarkeit. Bei einer mittleren Entfernung von 300 km erhöht sich die Mindestelevation<br />
in Richtung der Punkte zueinander schon um ca. 2,5 ◦ .<br />
Eine weitere Besonderheit ergibt sich durch die relative Nähe des Messgebietes zum Pol. Auch wenn<br />
beide Antennen, d.h. sowohl die der Basisstation als auch die des Rovers, nach Norden ausgerichtet<br />
werden, zeigen sie doch nicht, auch nicht annähernd, in die gleiche Richtung. Es müssen also sowohl<br />
elevations- als auch azimutabhängige Korrekturen für das Antennenphasenzentrum verwendet<br />
werden.<br />
3.2.2 Basisstationen<br />
C 39<br />
C 36<br />
C 35<br />
C 34<br />
C 33<br />
C 32<br />
C 31<br />
C 30<br />
C 29<br />
C 28<br />
C 27<br />
C 26<br />
C 25<br />
C 24<br />
C 23<br />
C 22<br />
C 21<br />
C 20<br />
C 19<br />
C 18<br />
C 17<br />
C 16<br />
C 15<br />
C 14<br />
C 13<br />
C 12<br />
C 11<br />
C 10<br />
C 09<br />
C 08<br />
C 07<br />
C 06<br />
C 05<br />
Kulusuk<br />
Kellyville<br />
Kangerlussuaq<br />
0 m 50,0 km 100,0 km 150,0 km 200,0 km 250,0 km<br />
Abbildung 3.2: Projektplan - Zur besseren Übersicht wurden einige von Kulusuk ausgehende Basislinien deaktiviert<br />
Zur Auswertung der Daten werden drei Basisstationen verwendet. An der Ostküste ist dies die permanente<br />
Referenzstation Kulusuk 7 der UNAVCO. An der Westküste sind dies die Stationen Kangerlussuaq,<br />
welche von der TU Dresden im Sommer 2002 betrieben wurde, und die IGS Station<br />
Kellyville 8 .<br />
3.2.3 Satellitenkonstellation<br />
Zum Zeitpunkt der Grönlanddurchquerung 2002 (23.07.2002 - 03.09.2002) befanden sich 28 einsatzfähige<br />
<strong>GPS</strong>-Satelliten im Orbit. Auf Grund ihrer Konstellation überfliegen die Satelliten nicht die<br />
Pole. Es ist nur bis zu einer Breite von 55 ◦ möglich Satelliten im Zenit zu beobachten. Im Gebiet der<br />
7 http://archive.unavco.org/query/pss, Mai 2005<br />
8 http://igscb.jpl.nasa.gov/network/site/kely.html, Juni 2005<br />
38
Kangerlussuaq Kulusuk Kellyville<br />
Empfänger Trimble 4000SSE Trimble 4000SSE Ashtech Z-XII3<br />
Antenne Trimble 4000ST L1/L2 Dorne Margolin ASH701945C M<br />
L1/L2 Geodetic mit Chokerings<br />
Aufzeichnungsrate 15 sec 30 sec 30 sec<br />
Betreiber TU Dresden UNAVCO SRI<br />
Tabelle 3.2: Referenzstationen der Grönlandexpedition 2002<br />
Expedition, welches sich von 65 ◦ bis 70 ◦ nördl. Breite erstreckte, liegt daher der höchste Elevationswinkel,<br />
unter dem ein Satellit beobachtet werden kann, bei ca. 70 ◦ . Dies ist jedoch nur die maximal<br />
mögliche Elevation, die Mehrzahl der Satelliten fliegt wesentlich tiefer. Dies schränkt die Gesamtzahl<br />
der <strong>zur</strong> Verfügung stehenden Satelliten enorm ein. Zwar können in Polargebieten, oder nahe dem<br />
Pol, auch Satelliten beobachtet werden, welche die gegenüberliegende Halbkugel überfliegen, jedoch<br />
sind auch hier auf Grund der niedrigen Elevation die Möglichkeiten begrenzt.<br />
Speziell für die Höhenbestimmung ist es wichtig Satelliten unter einem relativ hohen Elevationswinkel<br />
zu beobachten. In Polargebieten kann daher bei der Höhenbestimmung niemals die gleiche<br />
Genauigkeit wie bei der Lagebestimmung erreicht werden.<br />
Bei der Wahl der Mindestelevation muss man einen Spagat vollziehen. Einerseits ist es notwendig<br />
die Mindestelevation so niedrig wie möglich zu wählen, um bei der ohnehin schon sehr geringen<br />
Gesamtelevation immer noch genügend Satelliten <strong>zur</strong> Verfügung zu haben. Andererseits führen jedoch<br />
gerade diese niedrigen Satelliten durch große atmosphärische Laufzeitverzögerungen zu erheblichen<br />
Fehlereinflüssen bei der Auswertung.<br />
Zur Auswertung wurde die Mindestelevation auf 10 ◦ festgelegt, da sich bei den zuvor durchgeführten<br />
Probedurchläufen zeigte, dass Daten unter diesem Winkel mit zu vielen negativen Einflüssen behaftet<br />
sind und so das Gesamtergebnis verschlechtern.<br />
3.2.4 Aufzeichnungsrate<br />
Die Hauptauswirkung der ionosphärischen Refraktion auf Satellitensignale liegt darin, dass ihre Ausbreitungsgeschwindigkeit<br />
von der Geschwindigkeit im Vakuum abweicht. Der Betrag dieser Laufzeitverzögerung<br />
ist abhängig von der gesamten Elektronendichte entlang des Signalweges (TEC)<br />
(s. Abschnitt 2.5.1). Polarregionen weisen die Besonderheit auf, dass der Elektronengehalt hier zwar<br />
relativ gering ist, sich dieser jedoch zeitlich sehr stark ändert. In Folge ändert sich auch der Betrag<br />
der Laufzeitverzögerung zeitlich sehr stark. Übersteigt die Änderung zwischen zwei Messepochen<br />
eine halbe Wellenlänge, ist eine Bestimmung der Mehrdeutigkeiten in den meisten Fällen nicht mehr<br />
möglich. Die Aufzeichnungsrate muss so gewählt werden, dass die zeitlichen Änderungen der Einflüsse<br />
der Ionosphäre zwischen zwei Epochen deutlich unter einer halben Wellenlänge liegen.<br />
Für die Messungen in Grönland war daher eine Aufzeichnungsrate von 15 sec vorgesehen. Der<br />
Punkt Kulusuk an der Westküste wurde jedoch von der UNAVCO, trotz anderslautender vorheriger<br />
Absprachen, nur mit einer Aufzeichnungsrate von 30 sec beobachtet.<br />
39
3.3 Auswertung<br />
3.3.1 Beobachtungsdaten<br />
Die gesamten Daten der Grönlanddurchquerung 2002 wurden mir von Herrn Korth <strong>zur</strong> Verfügung<br />
gestellt. Alle Beobachtungsdaten liegen im RINEX Format vor und wurden im Vorfeld mit Hilfe<br />
des Programms DAT2RIN aus den Empfängerrohdaten erzeugt und bearbeitet. Da während der<br />
Expedition keine Eingabeeinheit mitgeführt wurde, mussten die Beobachtungen im Nachhinein noch<br />
um die Antennenhöhen ergänzt werden.<br />
Für die Camps 05 bis 36 und für Camp 39 liegen jeweils Beobachtungen über einen Zeitraum von<br />
ca. zehn Stunden vor. Der Empfänger wurde über einer magnetischen Vermarkung aufgebaut und<br />
dieser Punkt über Nacht, gegen null Uhr (<strong>GPS</strong>-Zeit), bis zum späten Nachmittag beobachtet.<br />
Rover/Camp<br />
Empfänger Trimble 5700<br />
Antenne Trimble Zephyr mit Groundplane<br />
Aufzeichnungsrate<br />
15 sec<br />
Tabelle 3.3: Beobachtungen in den einzelnen Camps<br />
3.3.2 Auswerteprogramme<br />
Zur Berechnung wurde der TFH Berlin von Trimble die Software Trimble Total Control (TTC) 9<br />
in der aktuellen Programmversion 2.73 vom Juni 2003 mit den Zusatzmodulen Ausgleichung und<br />
Postprocessing VRS überlassen.<br />
Als Alternative dazu wäre zwar auch eine Auswertung mit Trimble Geomatics Office (TGO) 10<br />
möglich, <strong>zur</strong> Auswertung langer Basislinien wurde jedoch TTC empfohlen.<br />
3.3.3 Präzise Bahndaten<br />
Die Auswertung der Messungen soll mit präzisen Bahndaten erfolgen. Hierzu werden Bahnen des IGS<br />
verwendet, welche als Dateien frei im Internet 11 <strong>zur</strong> Verfügung stehen. Die Dateien umfassen immer<br />
genau einen Tag in <strong>GPS</strong>-Zeit. Betrachtet man die Daten genau, zeigt sich, dass beim Übergang<br />
von einem Tag zum nächsten ein kleiner Knick in der Satellitenbahn vorhanden ist. Sein Ursprung<br />
liegt in der Verarbeitung und Zusammenfassung der Daten. Man könnte von einem Rundungsfehler<br />
sprechen.<br />
Für die Genauigkeit der Auswertung spielt dieser Umstand keine Rolle. Die <strong>zur</strong> Auswertung verwendeten<br />
Programme betrachten jedoch die vor null Uhr (<strong>GPS</strong>-Zeit) gemachten Beobachtungen als eigene<br />
Sessions und würden diese demzufolge unabhängig voneinander berechnen. Daher wurde bei der<br />
Auswertung der Grönlanddaten die im Allgemeinen relativ kurzen Beobachtungen vor Mitternacht<br />
(<strong>GPS</strong>-Zeit) nicht in die Auswertung mit einbezogen. Dies war bei der Planung der Messung auch so<br />
beabsichtigt.<br />
9 http://www.trimble.com/totalcontrol.shtml, Juni 2005<br />
10 http://www.trimble.com/geomaticsoffice.shtml, Juni 2005<br />
11 http://igscb.jpl.nasa.gov/components/prods.html, Mai 2005<br />
40
Kapitel 4<br />
Auswertung der Grönlanddaten<br />
Ziel dieser Auswertung war es, auf Grundlage der in Grönland gewonnenen Daten, Eisbewegungsparameter<br />
für die einzelnen Aufnahmepunkte (Camps) zu bestimmen. Unter Eisbewegungsparametern<br />
wird in diesem Fall die Größe der zeitlichen relativen Bewegung eines Punktes und seine Bewegungsrichtung<br />
verstanden.<br />
Hauptzweck der Expedition war jedoch die Bestimmung eines Höhenprofils des grönländischen Inlandeises,<br />
also eine statische Auswertung, und unter diesen Voraussetzungen wurden die Messungen<br />
auch geplant [Burandt, 2003]. Um aus den relativ kurzen Beobachtungszeiträumen und unter den<br />
besonderen Bedingungen in polaren Gebieten überhaupt zu einem verwertbaren Ergebnis zu kommen<br />
bzw. um eine optimale Auswertestrategie zu finden, falls diese existiert, wurde die Auswertung nach<br />
verschiedenen Verfahren durchgeführt.<br />
4.1 Kinematische Auswertung<br />
Unter der kinematischen Auswertung wird die Berechnung je eines Neupunktes für jede Epoche relativ<br />
zu einer der beiden Basisstationen verstanden.<br />
Zusammenfassend kann gesagt werden, dass mit der Software Trimble Total Control eine kinematische<br />
Auswertung der vorliegenden Daten nicht möglich war. Der Hauptgrund liegt in den Schwierigkeiten<br />
die das Auswerteprogramm bei der Lösung der Phasenmehrdeutigkeit hat.<br />
Die Festlegung der Mehrdeutigkeit auf einen ganzzahligen Wert stellt das Kernproblem der kinematischen<br />
Auswertung dar. Nur durch eine Fixed-Lösung werden Genauigkeiten erreicht, die eine Aussage<br />
über kinematische Bewegungen zulassen. Alle anderen Lösungen können nicht verwendet werden.<br />
Generell ist der Algorithmus, der <strong>zur</strong> Lösung der Phasenmehrdeutigkeiten im Berechnungsmodus<br />
” On the Fly“ und Stop & Go“ verwendet wird, auf eine maximale Entfernung zwischen Basisstation<br />
”<br />
und Rover von 230 Kilometern beschränkt. Das bedeutet, dass in diesem Modus nur ca. 20 % aller<br />
möglichen Kombinationen <strong>zur</strong> Auswertung zulässig sind. Alle Basislinien, welche als Festpunkt Kangerlussuaq<br />
oder Kellyville verwenden, sind länger als 275 Kilometer. Von der Basisstation Kulusuk<br />
aus lassen sich prinzipiell nur die Camps 05 bis 15 berechnen.<br />
Nachdem bei der Prozessierung der verbleibenden Basislinien alle sinnvollen und möglichen Prozessierungsoptionen<br />
getestet und die Ergebnisse miteinander verglichen wurden, lässt sich erkennen,<br />
dass lediglich die Festlegung des maximalen Ionosphärenfehlers einen signifikanten Unterschied in<br />
den Ergebnissen bewirkt.<br />
Laut der Hilfefunktion von TTC und der Aussage von Herrn Korth bezeichnet der in Millimetern<br />
definierte Parameter den höchsten Wert der kurzzeitigen Schwankungen der Laufzeitverzögerungen<br />
41
in der Ionosphäre. Er ist somit ein Wert für den größtmöglichen zu erwartenden Restfehler zwischen<br />
zwei Epochen, der von der verwendeten Modellierung, in diesem Fall von der ionosphärenfreien<br />
Linearkombination, nicht erfasst werden kann, bzw. bezeichnet er die größtmögliche relative Änderung<br />
der durch die Ionosphäre verursachten Laufzeitveränderungen zwischen zwei Epochen.<br />
Ist der gewählte Wert kleiner als die tatsächlich auftretenden Fehler, vermutet die Software Phasensprünge<br />
zwischen Epochen bei denen keine vorhanden sind. Wird dagegen ein größerer Wert eingestellt<br />
als eine halbe bzw. eine ganze Wellenlänge der Trägerwelle, ist es schwierig oder unmöglich<br />
überhaupt noch Phasensprünge zu entdecken. Das Ergebnis im letzteren Fall scheint zwar auf den<br />
ersten Blick besser, es ist jedoch fraglich inwieweit es noch aussagekräftig ist.<br />
Ganz egal welche Art der Einstellung man auch wählt, eine ”<br />
echte“ kinematische Auswertung liefert<br />
kein befriedigendes Ergebnis.<br />
4.2 Auswertung mit VRS<br />
Alle Versuche die Grönlanddaten mit einer Virtuellen Referenzstation zu berechnen, scheiterten. Die<br />
Auswertung wurde zum einen mit WaSoft und zum anderen mit dem VRS Modul von Trimble Total<br />
Control durchgeführt.<br />
Der Grund liegt darin, dass die verwendeten Algorithmen nicht für Distanzen von mehreren hundert<br />
Kilometern ausgelegt sind. Sie müssten zu diesem Zweck erst angepasst werden. Nachdem auch Herr<br />
Dr. Wanninger von der TU Dresden zu anderen Methoden riet, wurden weitere Versuche aufgegeben.<br />
4.3 Auswertung in kurzen Zeitfenstern (Pseudokinematik)<br />
Unter der Pseudokinematischen Auswertung wird hier das Zerlegen des gesamten Aufnahmezeitraums<br />
in relativ kurze, sich teilweise überlappende Zeitfenster (s. Abb. 4.1) verstanden, welche anschließend<br />
jeweils statisch prozessiert werden (entspricht einer gleitenden Mittelbildung von Positionsberechnungen).<br />
Dieses Vorgehen bietet zwei entscheidende Vorteile gegenüber der rein kinematischen<br />
Auswertung. Eine statische Lösung über einen bestimmten Zeitraum ist wesentlich stabiler als die<br />
kinematische Bestimmung einzelner Epochen bzw. macht eine Auswertung, gerade unter schwierigen<br />
Bedingungen, erst möglich. Außerdem bewirkt die Methode der gleitenden Mittelbildung eine<br />
weitgehende Filterung der Daten von kurzperiodischen Störungen, d.h. sie übernimmt die Aufgabe<br />
eines Tiefpassfilters. Nachteile dieses Vorgehens liegen jedoch in der sich ergebenden großen Korrelation<br />
der resultierenden Daten, dieser Effekt verstärkt sich in dem Maße in dem sich die einzelnen<br />
Zeitfenster überlappen, und in der Verringerung des gesamten Auswertezeitraums je um die Hälfte<br />
der Länge eines Zeitfensters am Anfang und am Ende des gesamten Aufnahmezeitraums.<br />
Um optimale Ergebnisse zu erzielen, wären daher direkt aneinander folgende, relativ kurze Zeitfenster<br />
am besten geeignet. Bei der Realisierung wird jedoch die minimale Größe eines Zeitfensters<br />
durch die Länge an Beobachtungsdaten bestimmt, welche benötigt werden um bei der Prozessierung<br />
noch zu einem verwertbaren Ergebnis zu gelangen. Die maximale Größe ist abhängig von dem am<br />
Ende verbleibenden Auswertezeitraum und sollte nicht höher als nötig gewählt werden. Für die in<br />
Grönland gewonnen Beobachtungsdaten wurden vorab Kombinationen aus verschiedenen Basisstationen,<br />
Streckenlängen und Zeitfenstern zu Testzwecken ausgewertet. Als Folge daraus werden die<br />
in den einzelnen Camps gewonnenen Daten jeweils zweimal in unterschiedlich lange Zeitfenster zerschnitten:<br />
Zum einen in Stücke mit einer Länge von drei Stunden und einer zeitlichen Verschiebung<br />
von einer halben Stunde und zum anderen in Stücke mit einer Länge von vier Stunden und auch<br />
hier einer zeitlichen Verschiebung von einer halben Stunde. So bleibt nach der statischen Auswertung<br />
noch die Möglichkeit sich für das längere Zeitfenster zu entscheiden, sollten die Drei-Stunden-Stücke<br />
kein Ergebnis liefern.<br />
42
t0<br />
gesamter Aufnahmezeitraum<br />
tn<br />
Camp<br />
Auswertezeitraum<br />
t0<br />
t3<br />
t6<br />
file 0<br />
file 3<br />
file 6<br />
t1<br />
t4<br />
t7<br />
file 1<br />
file 4<br />
file 7<br />
t2<br />
t5<br />
t8<br />
file 2<br />
file 5<br />
file 8<br />
Abbildung 4.1: Zerlegen des gesamten Aufnahmezeitraums in kurze Zeitfenster<br />
Die RINEX Files mit den Beobachtungen der Camps wurden mit dem selbstgeschriebenen Hilfsprogramm<br />
Rinexcut in einzelne Abschnitte zerlegt und gespeichert. Die Bezeichnung der dabei entstandenen<br />
Punkte und Dateien setzte sich aus dem Punktnamen der Ursprungsdatei und dem Zeitpunkt<br />
der ersten Beobachtung (in Minuten des jeweiligen Tages) zusammen. Als Beispiel: C07 405 bzw.<br />
C07 405.02o für Camp 07 am 30. Juli 2002 um 06:45 Uhr (<strong>GPS</strong>-Zeit).<br />
Die Prozessierung der Daten erfolgte, wie schon bei der kinematischen Auswertung, mit der Software<br />
Trimble Total Control (TTC) Version 2.73. Als Basis für die pseudokinematische Prozessierung<br />
verwendeten die Camps 05 bis 21 den Punkt Kulusuk im Osten, die Camps 22 und 23 den Punkt<br />
Kangerlussuaq und die Camps 24 bis 36 und 39 den Punkt Kellyville (s. Abb. 3.2).<br />
Die Entscheidung für Kellyville als Basisstation, obwohl hier die Daten im Gegensatz zu Kangerlussuaq<br />
anstatt mit 15 sec nur mit einer Taktrate von 30 sec vorlagen, hatte zwei Gründe: Zum einen<br />
gab es für Camp 39 Lücken in den Beobachtungen von Kangerlussuaq, und zum anderen wiesen die<br />
Ergebnisse der Auswertung mit Kellyville nicht nur einen geringeren mittleren Fehler auf, sondern die<br />
zeitlich aufeinander folgenden Punkte zeigten in vielen Fällen noch einen wesentlich geradlinigeren<br />
Verlauf.<br />
Wie aus den Lehrbüchern zu entnehmen ist, sind bei relativ langen Basislinien und einer Beobachtungsdauer<br />
von mehreren Stunden Float Lösungen den Fixed Lösungen vorzuziehen. So wurde auch<br />
hier als Ergebnis die Float Lösung verwendet, zumal die Bestimmung ganzzahliger Mehrdeutigkeiten<br />
nicht in allen Fällen möglich war.<br />
Als Ergebnis liegen somit für jedes Camp eine große Menge an Punkten mit Koordinaten im ITRF00<br />
(Epoche 2002.5) vor. Als Beispiel liefert ein Camp mit einer gesamten Beobachtungsdauer von 12<br />
Stunden insgesamt 35 Punkte: ein Punkt X Camp (berechnet aus den Daten des gesamten Aufnahmezeitraums),<br />
18 Punkte X i (berechnet aus den Daten der einzelnen Zeitfenster mit einer Länge von<br />
drei Stunden und einer zeitlichen Verschiebung von 30 Minuten) und 16 weitere Punkte X i (berechnet<br />
aus den Daten der einzelnen Zeitfenster mit einer Länge von vier Stunden und einer zeitlichen<br />
Verschiebung von 30 Minuten).<br />
Als Aussage über die Güte der Auswertung liefert TTC für jeden Punkt X i jeweils Standardabweichungen<br />
s Xi , s Y i und s Zi der berechneten Koordinate. Sie liegen für alle Punkte, berechnet aus<br />
den Daten der einzelnen Zeitfenster, für alle drei Achsen des Koordinatensystems zwischen 3-7 Millimetern.<br />
Lediglich die Abweichungen der Punkte, zu deren Berechnung Kangerlussuaq als Basis<br />
verwendet wurde, liegen mit 9-12 Millimetern leicht darüber. Zwar sind die angegebenen Standard-<br />
43
abweichungen erfahrungsgemäß meist um den Faktor zwei bis drei zu optimistisch angegeben, doch<br />
lässt sich daraus erkennen, dass insgesamt alle Ergebnisse ungefähr die gleiche Genauigkeit aufweisen<br />
und keine so genannten Ausreißer vorhanden sind. Dies macht es unnötig bei der folgenden<br />
Auswertung Gewichte einzuführen. Die weitere Berechnung erfolgte mit Mathcad.<br />
Um numerische Probleme bei den Berechnungen zu vermeiden, wurde für jedes Camp von den<br />
Koordinaten der einzelnen Zeitfenster X i jeweils die Koordinate des Punktes X Camp (berechnet über<br />
den gesamten Aufnahmezeitraum) abgezogen.<br />
∆X Camp,i =<br />
⎛<br />
⎜<br />
⎝<br />
⎞<br />
∆X Camp,i<br />
⎟<br />
∆Y Camp,i<br />
∆Z Camp,i<br />
⎠ =<br />
⎛<br />
⎜<br />
⎝<br />
⎞<br />
X i − X Camp<br />
⎟<br />
Y i − Y Camp ⎠ (4.1)<br />
Z i − Z Camp<br />
Als Ergebnis erhält man dadurch Koordinatenunterschiede im geozentrischen Koordinatensystem.<br />
Eine bereits durchgeführte Auswertung anderer ebenfalls bei der Grönlandexpedition 2002 aufgenommener<br />
Daten [Burandt, 2003] zeigte, dass die Gebiete um die einzelnen Camps herum relativ flach<br />
sind. Die größte gemessene Steigung lag bei 1,5 %. Des Weiteren ist bei der Höhengenauigkeit auf<br />
Grund der ungünstigen Satellitenkonstellation sicherlich mit schlechteren Ergebnissen zu rechnen als<br />
bei der Lagegenauigkeit (s. Abschnitt 3.2.3). Zur Bestimmung der Eisbewegungsparameter in den<br />
einzelnen Camps sind daher nur die Punktbewegungen von Interesse, die auf eine entsprechende<br />
Tangentialebene projiziert wurden. Die Änderung der Punkthöhe kann vernachlässigt werden.<br />
Die Projektion erfolgt am einfachsten, indem man alle Koordinatenunterschiede im geozentrischen<br />
Koordinatensystem in Koordinatenunterschiede eines topozentrischen Koordinatensystems transformiert.<br />
Als Topozentrum wählt man X Camp , die primäre Achse zeigt dabei nach Norden, die sekundäre<br />
Achse nach Osten und die tertiäre Achse in Richtung der Normalen der so gebildeten Ebene. Die<br />
Richtungen Nord und Ost beziehen sich dabei wohlgemerkt auf das ITRF und nicht auf magnetische<br />
Richtungen, die später im Gelände benutzt werden.<br />
Die Koordinatenunterschiede im geozentrischen ∆X Camp,i und im topozentrischen Koordinatensystem<br />
hängen zusammen über<br />
∆x Camp,i =<br />
⎛<br />
⎜<br />
⎝<br />
⎞<br />
∆u Camp,i<br />
⎟<br />
∆v Camp,i<br />
∆w Camp,i<br />
⎠ (4.2)<br />
mit der Drehmatrix<br />
D =<br />
⎛<br />
⎜<br />
⎝<br />
∆x Camp,i = D T · ∆X Camp,i (4.3)<br />
− sinϕcos λ − sinλ cos ϕ cos λ<br />
− sinϕsinλ cos λ cos ϕ sinλ<br />
cos ϕ 0 sinϕ<br />
⎞<br />
⎟<br />
⎠ (4.4)<br />
Da <strong>zur</strong> Berechnung der Drehmatrix die Breite ϕ und Länge λ des Punktes X Camp benötigt werden,<br />
müssen vorab seine ellipsoidischen Koordinaten (ϕ, λ, h), bezogen auf das GRS-80 Ellipsoid,<br />
berechnet werden. Die entsprechenden Formeln der Landesvermessung findet man unter anderem bei<br />
[Heck, 2003, Hehl, 2005b].<br />
44
300<br />
240<br />
120<br />
Die ellipsoidische Länge berechnet sich dabei über<br />
Y Camp<br />
X Camp<br />
= tanλ (4.5)<br />
Da jedoch bei der weiteren Berechnung die Breite ϕ und die Höhe h voneinander abhängen, macht<br />
dies ein iteratives Vorgehen erforderlich. Ein Startwert ϕ 0 für die ellipsoidische Breite ergibt sich aus<br />
tan ϕ 0 = Z Camp<br />
p<br />
, als Näherungshöhe wählt man h 0 = 0 m.<br />
Mit den im i-ten Iterationsschritt (i = 1, 2, 3, . . .) berechneten Werten ϕ i und h i erhält man folgendes<br />
Iterationsschema:<br />
N i<br />
⇐<br />
a<br />
√1 − e 2 sin 2 ϕ i−1<br />
(4.6)<br />
h i<br />
⇐<br />
tan ϕ i ⇐ Z Camp<br />
·<br />
p<br />
i ⇐ i + 1<br />
p<br />
− N i (4.7)<br />
cos ϕ i−1<br />
(<br />
1 − e 2 ·<br />
N i<br />
N i + h i<br />
) −1<br />
(4.8)<br />
wobei<br />
√<br />
p = XCamp 2 + Y Camp<br />
2<br />
e 2 = f · (2 − f)<br />
a = 6 378 137.000 m<br />
f = 1 : 298.2572221<br />
Abstand p des Punktes X Camp von der Rotationsachse<br />
Quadtrat der ersten numerischen Exzentrizität<br />
Große Halbachse GRS-80 Ellipsoid<br />
Abplattung GRS-80 Ellipsoid<br />
Das Verfahren konvergiert im Allgemeinen sehr schnell. Für die gegebenen Anforderungen reichen<br />
fünf Iterationsschritte (bis i = 5) sicherlich bei weitem aus.<br />
Die so transformierten Punkte lassen sich nun graphisch anschaulich in einem u-v-Diagramm darstellen:<br />
Im Idealfall sind die Punkte annähernd geradlinig angeordnet, während im ungünstigsten Fall<br />
nur ein Punkthaufen zu erkennen ist.<br />
Ebene Projektion - Camp 34, 4h<br />
Ebene Projektion - Camp 20, 4h<br />
60<br />
0<br />
50<br />
50<br />
Nord [mm]<br />
0<br />
180<br />
Nord [mm]<br />
0<br />
50<br />
360<br />
50<br />
50 0 50 100 150<br />
Ost [mm]<br />
50 0 50 100 150<br />
Ost [mm]<br />
Abbildung 4.2: Aus der Darstellung ist bereits erkennbar ob eine geradlinige Bewegung vorliegt oder nicht<br />
45
Nur wenn die Punkte zeitlich als auch geographisch einen annähernd geradlinigen Verlauf aufweisen,<br />
kann von Eisbewegungen an der Position des jeweiligen Camps ausgegangen werden. Daher wurden<br />
nur solche Camps <strong>zur</strong> weiteren Auswertung herangezogen, die einen solchen Verlauf zeigten. Dies<br />
war vor allem bei Camps nahe der Küste der Fall. Die Camps auf dem Inlandeis zeigten dagegen<br />
keine Anzeichen für eine Bewegung. Bei ihnen waren die Punkte mehr oder weniger zufällig um den<br />
Koordinatenursprung angeordnet.<br />
Das in Abbildung 4.2 dargestellte Camp 20 befindet sich in der Mitte der Traverse, wo mit nur kleinen<br />
Bewegungen zu rechnen ist, Camp 34 dagegen liegt im Einzugsbereich des Eisstroms von Ilulissat<br />
Die weitere Aufgabe ist nun aus den gegebenen Punkten Parameter für die beiden Größen Bewegungsrichtung<br />
und Geschwindigkeit abzuleiten.<br />
Im Falle der Bewegungsrichtung ist dies recht einfach zu lösen. Man berechnet zwischen allen in die<br />
u-v-Ebene projizierten Punkten eines Camps eine ausgleichende Gerade g. Da vorab alle Punkte X i<br />
in ein topozentrisches Koordinatensystem überführt wurden, dessen Koordinatenursprung in unmittelbarer<br />
Nähe dieser Punkte liegt, entspricht der Winkel zwischen der u-Achse des topozentrischen<br />
Systems und der ausgleichenden Geraden g direkt dem gesuchten Azimut α im ITRF.<br />
In einem mathematischen Koordinatensystem mit der Abszisse v und der Ordinate u ist eine lineare<br />
Funktion definiert über ihren u-Achsenabschnitt a und ihre Steigung b, also die Funktion u = g (v) =<br />
a + b · v. Die beiden Parameter a und b der gesuchten ausgleichenden Gerade g lassen sich über eine<br />
Ausgleichung im Sinne der Methode der kleinsten Quadrate bestimmen. Die entsprechnden Formeln<br />
findet man unter anderem bei [Hehl, 2005a, Niemeier, 2002]<br />
Die dabei verwendete Designmatrix A und der Vektor der Beobachtungen l haben folgende einfache<br />
Form:<br />
⎛<br />
A =<br />
⎜<br />
⎝<br />
⎞<br />
1 v 1<br />
1 v 2<br />
⎟<br />
. .<br />
1 v n<br />
⎠ ,<br />
⎛<br />
l = ⎜<br />
⎝<br />
⎞<br />
u 1<br />
u 2<br />
⎟<br />
. ⎠<br />
u n<br />
(4.9)<br />
Das weitere Vorgehen ist der Standardalgorithmus der Ausgleichungsrechnung.<br />
Der gesuchte Wert des Azimuts α berechnet sich aus der Steigung b über<br />
cot(α) = b (4.10)<br />
Dieser Wert ist allerdings nur für Bewegungen in östliche Richtung korrekt. Bewegt sich der Punkt<br />
jedoch in westlicher Richtung, ist zum berechneten α noch π zu addieren.<br />
Als Ergebnis der Ausgleichung erhält man neben den Werten der beiden Parameter a und b über den<br />
mittleren Gewichtseinheitsfehler und die Kofaktor-Matrix noch deren mittlere Fehler m a und m b .<br />
Der mittlere Fehler m α des Azimuts berechtet sich aus<br />
m α = ± |acot(b + m b ) − acot(b)| (4.11)<br />
Die projizierte Gesamtbewegung ∆s des Empfängers setzt sich zusammen aus einer Bewegung ∆u<br />
in Richtung der u-Achse und einer Bewegung ∆v in Richtung der v-Achse des topozentrischen<br />
Systems. Bei der Zerlegung der Daten des gesamten Aufnahmezeitraums in einzelne Zeitfenster,<br />
wurden die entstandenen Punkte mit einer Zeitmarke versehen. Daher ist es möglich, die zeitlichen<br />
Änderungen der Koordinatenwerte, getrennt nach den beiden Achsen, in einem u-t bzw. v-t-Diagram<br />
46
aufzutragen. Für die aufgetragenen Punkte in beiden Diagrammen lassen sich nun wiederum mit<br />
Hilfe der entsprechend abgeänderten Formeln (4.9) zwei ausgleichende Geraden g u und g v mit ihren<br />
Parametern a u , a v , b u und b v bestimmen. Die beiden Abschnitte a u und a v sind nicht weiter von<br />
Bedeutung, die beiden Steigungen b u und b v jedoch, sind ein Maß für die zeitliche Änderung der<br />
Empfängerposition, ihrer Bewegungsgeschwindigkeit, entlang der u- bzw. v-Achse.<br />
b u = ∆u<br />
∆t = ˙u bzw. b v = ∆v<br />
∆t<br />
= ˙v (4.12)<br />
100<br />
Zeitliche Verschiebung in Nordrichtung - Camp 34, 4h<br />
150<br />
Zeitliche Verschiebung in Ostrichtung - Camp 34, 4h<br />
80<br />
100<br />
60<br />
50<br />
40<br />
Nord [mm]<br />
20<br />
Ost [mm]<br />
0<br />
0<br />
50<br />
20<br />
40<br />
100<br />
60<br />
0 50 100 150 200 250 300 350 400<br />
Zeit [min]<br />
150<br />
0 50 100 150 200 250 300 350 400<br />
Zeit [min]<br />
Abbildung 4.3: Bestimmung der Bewegungsgröße getrennt nach Achsrichtungen mit Hilfe ausgleichender<br />
Geraden<br />
Die Gesamtbewegung ∆s und damit auch die Gesamtgeschwindigkeit ṡ lassen sich einfach bestimmen<br />
nach:<br />
∆s =<br />
√<br />
∆u 2 + ∆v 2 bzw. ṡ = ∆s<br />
∆t = √<br />
b u 2 + b v 2 = √ ˙u 2 + ˙v 2 (4.13)<br />
Einen Wert für den mittleren Fehler mṡ der Gesamtgeschwindigkeit erhält man aus m bu und m bv<br />
mit Hilfe des einfachen Varianzfortpflanzungsgesetzes. Zwar sind b u und b v sicherlich miteinander<br />
korreliert, doch die entsprechende Kovarianz ist nicht bekannt.<br />
⎛<br />
mṡ =<br />
⎜<br />
√⎝<br />
b u<br />
(<br />
b u 2 + b v<br />
2 )1 2<br />
⎞2<br />
⎟<br />
⎠<br />
⎛<br />
· m 2 bu + ⎜<br />
⎝<br />
b v<br />
(<br />
b u 2 + b v<br />
2 )1 2<br />
⎞2<br />
⎟<br />
⎠<br />
· m bv<br />
2 (4.14)<br />
Die so berechneten Werte lassen sich übersichtlich in einer Tabelle darstellen (s. Tabelle 4.1).<br />
Die eigentliche Schwierigkeit liegt nun darin, die berechneten Werte richtig zu beurteilen und entsprechend<br />
<strong>zur</strong> weiteren Verarbeitung auszuwählen. Dies kann allerdings nur recht subjektiv geschehen<br />
und muss für jedes einzelne Camp separat erfolgen. Der Grund dafür ist, dass in den berechneten<br />
Werten noch eine Vielzahl an Fehlereinflüssen stecken können.<br />
Die Bestimmung einer Bewegungsrichtung erfolgt über eine lineare Regression zwischen allen berechneten<br />
Punkten. Bilden diese Punkte zeitlich und geometrisch einen annähernd geradlinigen Verlauf,<br />
wie z.B. in Abbildung 4.2 links, funktioniert dieses Verfahren auch ziemlich stabil, die ausgleichende<br />
Gerade passt sich dem Verlauf gut an und die berechneten Werte beschreiben die Bewegungsrichtung<br />
gut.<br />
47
Camp 3 h 4 h<br />
α [ ◦ ] m α [ ◦ ] ṡ [ ]<br />
m<br />
Jahr<br />
mṡ [%] α [ ◦ ] m α [ ◦ ] ṡ [ ]<br />
m<br />
Jahr<br />
mṡ [%]<br />
05 121, 5 17, 7 85 9, 0 125, 6 20, 4 78 7, 9 3 −<br />
08 - - - - 86, 7 3, 6 81 6, 3 4 +<br />
09 108, 8 5, 4 136 12, 6 77, 9 4, 8 100 20, 7 3 −<br />
10 125, 5 6, 6 157 10, 2 109, 7 3, 1 108 7, 8 4 ◦<br />
12 120, 6 20, 0 126 14, 4 100, 1 4, 8 120 12, 4 4 ◦<br />
13 117, 5 8, 8 52 13, 3 123, 0 6, 6 55 9, 3 4 −<br />
15 117, 2 7, 1 53 15, 1 127, 9 16, 3 42 18, 4 3 −−<br />
17 - - - - 74, 6 5, 0 17 55, 0 4 −−<br />
25 - - - - 272, 0 2, 4 31 15, 4 4 ◦<br />
27 257, 1 4, 7 59 10, 4 271, 6 3, 8 65 6, 2 4 ◦<br />
28 277, 3 4, 0 62 10, 6 273, 3 2, 6 67 6, 0 4 ◦<br />
29 265, 8 7, 2 54 13, 4 265, 5 4, 0 55 15, 3 4 −<br />
30 282, 9 6, 6 64 21, 7 277, 3 5, 9 85 13, 7 4 −<br />
31 264, 8 5, 2 111 15, 8 242, 5 4, 3 122 8, 9 4 −<br />
32 265, 5 2, 1 209 5, 1 267, 9 2, 1 265 3, 3 3 +<br />
33 270, 5 1, 4 274 4, 0 269, 4 1, 7 273 2, 8 3 ++<br />
34 241, 5 1, 1 315 2, 7 240, 8 0, 8 373 2, 9 3 ++<br />
35 231, 5 1, 0 247 1, 9 233, 2 1, 1 271 2, 7 3 ++<br />
36 237, 9 0, 9 147 4, 0 244, 5 2, 1 146 3, 5 3 ++<br />
39 79, 9 3, 8 9, 5 16, 5 100, 5 2, 7 8, 4 14, 3 4 −<br />
Tabelle 4.1: Ermittelte Richtung und Eisbewegung nach Auswertung der 3 h und 4 h Zeitfenster<br />
Bilden diese Punkte jedoch nur geometrisch einen annähernd geradlinigen Verlauf, d.h. springen sie,<br />
zeitlich gesehen, vor und <strong>zur</strong>ück, liefert die Berechnung zwar auch ein Ergebnis mit einer relativ<br />
geringen mittleren Abweichung, die Aussagekraft ist jedoch herabgesetzt. Das zeitliche Springen der<br />
Punkte geschah sozusagen ”<br />
versteckt“ und spiegelt sich nicht im berechneten mittleren Fehler wider.<br />
Bilden die Punkte weder geometrisch noch zeitlich einen annähernd geradlinigen Verlauf, besitzen<br />
die berechneten Werte keine Bedeutung mehr.<br />
Bei der Bestimmung einer zeitlichen Verschiebung wirken sich Abweichungen vom zeitlich und geometrisch<br />
geradlinigen Verlauf nicht in dem Maße negativ aus wie bei der Bestimmung der Bewegungsrichtung,<br />
da hier die ausgleichende Gerade im u-t- bzw. v-t-Diagram gebildet wird und die<br />
zeitlichen Abstände ∆t nur positive Werte haben. Allerdings bedingt auch hier eine Abweichung eine<br />
Verminderung der Aussagekraft.<br />
Aus diesem Grund kommt der Darstellung der Punkte im u-v-Diagram eine entscheidende Bedeutung<br />
bei der Beurteilung zu. Es wurde zwar schon nach der Prozessierung eine Auswahl unter den Camps<br />
getroffen, es ist jedoch schwer hier eine haarscharfe Grenze zu ziehen.<br />
Generell kann gesagt werden, je länger das Intervall (Zeitfenster) ist, desto kleiner wird der gesamte<br />
Auswertezeitraum und desto schlechter wird die Gesamtlösung. Auf der anderen Seite jedoch<br />
führen längere Intervalle zu einer stabileren Punktbestimmung und somit auch zu einer besseren<br />
Gesamtlösung. Ein Optimum für dieses Problem kann nur empirisch durch Vergleich der einzelnen<br />
Lösungen gefunden werden.<br />
Auch spielt insgesamt die Größe der Bewegung eine Rolle. Je kleiner die zeitliche Änderung, desto<br />
schwieriger ist es sie von vorhanden Fehlereinflüssen zu unterscheiden.<br />
Da die Güte der Ergebnisse sich nicht nur in den reinen Zahlenwerten widerspiegelt, habe ich versucht<br />
dies durch Symbole (−− bis ++) in Tabelle 4.1 kenntlich zu machen. Die Zahlen 3 oder 4 in der<br />
vorletzten Spalte geben an, die Werte welches Zeitfensters weiter verwendet wurden.<br />
48
Im Sommer 2006, also nahezu auf den Tag genau vier Jahre nach der ersten Grönlanddurchquerung,<br />
soll die Expedition auf der gleichen Route wiederholt werden. Ziel ist es die magnetischen Vermarkungen<br />
mit Hilfe eines Detektors zu finden und die Punkte anschließend mit <strong>GPS</strong> zu beobachten.<br />
Aus dem Vergleich zwischen neuer und alter Punktkoordinate ist natürlich eine wesentlich genauere<br />
Bestimmung aller bis dahin stattgefundenen Eisbewegungen möglich.<br />
Um die Suche nach den eingebrachten Vermarkungen abzukürzen, kann mit Hilfe der oben berechneten<br />
ungefähren Bewegungen und ihrer Abweichungen ein Suchfenster (s. Abb. 4.4) bestimmt werden<br />
in dem sich der Punkt voraussichtlich vier Jahre nach der ersten Messung befindet. Die Extrapolation<br />
der bestimmten Bewegungen über einen solch großen Zeitraum ist natürlich sehr fehleranfällig.<br />
Geogr. Nord<br />
Magn. Nord<br />
m<br />
Strecke<br />
Magn.<br />
Deklination<br />
Azimut<br />
m<br />
Azimut<br />
Abbildung 4.4: Suchfenster - Voraussichtliche Lage des Punktes zum Zeitpunkt der 2. Expedition<br />
Die Lageänderung des Punktes berechnet sich durch einfaches polares Anhängen.<br />
∆x =<br />
⎛<br />
⎜<br />
⎝<br />
∆u<br />
∆v<br />
∆w<br />
⎞<br />
⎟<br />
⎠ =<br />
⎛<br />
⎜<br />
⎝<br />
cos α · ∆s(4a)<br />
sinα · ∆s(4a)<br />
0<br />
⎞<br />
⎟<br />
⎠ (4.15)<br />
Eine Höhenänderung wurde nicht angenommen. Die Eckpunkte des Suchfensters berechnen sich<br />
entsprechend indem man die mittleren Fehler anbringt.<br />
Zur Absteckung werden Koordinaten im ITRF benötigt. Die Verschiebungen ∆x im topozentrischen<br />
System sind daher noch in das geozentrische System zu transformieren<br />
∆X = D · ∆x (4.16)<br />
und <strong>zur</strong> Lage des Punktes 2002 zu addieren.<br />
X 2006 = X 2002 + ∆X (4.17)<br />
In Tabelle 4.2 finden sich zusammengefasst alle prognostizierten Bewegungsgrößen über einen Zeitraum<br />
von vier Jahren. Zusätzlich zum geometrischen Azimut wurde noch das magnetische Azimut<br />
angegeben (s. Abschnitt 3.1.5). Die Koordinaten des Punktes und seines Suchfensters sind im Anhang<br />
in Tabelle A.1 zu finden.<br />
49
Camp Azimut α [ ◦ ] magn. α [ ◦ ] ∆s(4a)[m] m ∆s(4a) [m] ∆α (4a)[m]<br />
05 122 149 341 30 106 −<br />
08 87 115 323 21 20 +<br />
09 108 136 543 69 51 −<br />
10 110 138 430 34 23 ◦<br />
12 100 129 481 60 40 ◦<br />
13 123 152 218 20 25 −<br />
15 117 146 213 32 27 −−<br />
17 74 104 69 38 6 −−<br />
25 272 304 123 18 5 ◦<br />
27 272 304 260 16 17 ◦<br />
28 273 305 267 16 12 ◦<br />
29 266 299 220 33 15 −<br />
30 277 311 341 47 35 −<br />
31 243 277 488 43 37 −<br />
32 265 299 836 42 31 +<br />
33 271 306 1094 44 27 ++<br />
34 241 276 1260 35 24 ++<br />
35 232 267 989 19 17 ++<br />
36 228 274 587 24 10 ++<br />
39 80 116 25 4 1 −<br />
Tabelle 4.2: Voraussichtliche Positionsänderungen bis Sommer 2006<br />
4.4 Zusammenfassung<br />
Immer wenn man versucht die Grenzen eines Verfahrens auszuleuchten besteht die schwierigste<br />
Aufgabe darin, zwischen Sinn und Unsinn der gewonnenen Ergebnisse zu entscheiden. Die Grenze<br />
zwischen diesen beiden Extremen verläuft fließend und verschwindet zum Teil ganz. Erst durch<br />
das systematische Betrachten des Problems aus allen Blickwinkeln und das konsequente Austesten<br />
verschiedener Szenarien wird dieser Unterschied sichtbar. Dafür ist in einer Diplomarbeit leider nur<br />
bedingt Zeit vorhanden. Was bleibt dann als Konsens der Grönlandauswertung?<br />
Mit dem in Abschnitt 4.3 verwendeten Verfahren der Pseudokinematik konnten Eisbewegungsparameter<br />
gewonnen werden, die durchaus plausibel erscheinen, vor allem, wenn man die Nachbarschaftsbeziehungen<br />
betrachtet. Die Richtungen und Bewegungsbeträge werden sich von Punkt zu Punkt<br />
nicht sprunghaft ändern, sondern gleichmäßig veränderlich sein. Das heißt, es können für die Punkte,<br />
für die keine Berechnung möglich war, Bewegungsparameter interpoliert werden.<br />
Die ermittelten Bewegungen werden größer, je kleiner die Entfernung <strong>zur</strong> Küste ist und die Bewegungsgrößen<br />
liegen etwa in dem zu erwartenden Bereich. Zudem kann eine Plausibilitätskontrolle<br />
erfolgen, indem man die Bewegungsrichtung mit der Hangneigungsrichtung [Burandt, 2003] vergleicht,<br />
da das Eis im Wesentlichen immer talwärts fließt. Die Abweichungen sind mit unter zwar<br />
relativ groß, es liegen jedoch keine groben Fehler vor. Das augenscheinlich seltsame Verhalten von<br />
Camp 39 lässt sich erklären, wenn man weiß, dass die Eismassen in diesem Gebiet auf einen Höhenzug<br />
auflaufen.<br />
Die relativ kleinen berechneten Fehler dürfen jedoch nicht darüber hinwegtäuschen, dass in den Ergebnissen<br />
noch eine Menge an Fehlereinflüssen stecken. Eine Prognose der Punktlage über vier Jahre<br />
ist daher äußerst heikel. Da die Folgeexpedition im Jahre 2006 an einen strengen Zeitplan gebunden<br />
ist, können Abweichungen zwischen tatsächlicher und prognostizierter Punktlage zu enormen<br />
50
Verzögerungen führen. Zu diesem Zweck wurde eine kleine Anwendung (Nansen) geschrieben (s.<br />
Anhang B). Mit ihr ist es möglich die Koordinaten eines Suchfensters direkt im Feld zu berechen,<br />
sollten sich neue Erkenntnisse ergeben.<br />
Die Auswertung zeigt aber auch, dass die Qualität der Ergebnisse vor allem von zwei Faktoren<br />
abhängt: der Qualität der Prozessierung und den äußeren Gegebenheiten.<br />
Ergebnisqualität<br />
Qualität der Prozessierung<br />
- Datenqualität<br />
- Auswerteprogramm<br />
Äußere Gegebenheiten<br />
- Bewegungsgröße<br />
- Entfernung<br />
- Äußere Einflüsse<br />
Mit Bewegungsgröße, Entfernung und äußeren Einflüssen, sind gerade in Grönland Bedingungen gegeben,<br />
die, wenn auch nicht konstant, so doch zumindest eng begrenzt sind. Die beiden Punkte<br />
Datenqualität und Auswerteprogramm obliegen dagegen unseren Einflüssen.<br />
In diesem Fall war mit TTC nur ein relativ einfaches Auswerteprogramm ohne viele Einflussmöglichkeiten<br />
gegeben. Spezielle, so genannte wissenschaftliche Software (wie z.B. die Berner <strong>GPS</strong>-Software),<br />
bietet die Möglichkeit alle Prozessierungsparameter zu verändern und auch das Ausgleichungsmodell<br />
an das Problem anzupassen. Der Begriff Datenqualität fasst alle Faktoren der Beobachtung selbst<br />
zusammen, wie verwendete Ausrüstung, Taktrate usw.<br />
Welche Qualität unter welchen Voraussetzungen erzielbar ist, können erst weitere Versuche zeigen.<br />
51
Kapitel 5<br />
Planung und Durchführung der<br />
Simulation<br />
Wie bereits bei der Auswertung der Grönlanddaten festzustellen war, ist es mitunter sehr schwierig<br />
mit einem Datensatz von nur wenigen Stunden über große Entfernungen kinematische Eisbewegungen<br />
zu ermitteln. Ziel der Simulation war es die Grenzen dieses Verfahrens aufzuzeigen, bzw. sollten<br />
Erkenntnisse darüber gewonnen werden, welche Erfordernisse vorliegen müssen um gewünschte Ergebnisse<br />
zu erzielen. Die Ergebnisse dienen vor allem <strong>zur</strong> Planung der Folgemessungen im Jahr 2006.<br />
5.1 Messungsaufbau und Konfiguration<br />
Natürlich können die Verhältnisse in polaren Gebieten nicht mit den hiesigen Gegebenheiten verglichen<br />
werden. Speziell die atmosphärischen Einflüsse auf die Signalausbreitung unterscheiden sich<br />
stark. Dies muss jedoch nicht zwangsläufig zu günstigeren Bedingungen führen.<br />
Eis bewegt sich, je nach seiner Lage und den äußeren Gegebenheiten, mit einer bestimmten Geschwindigkeit.<br />
Diese liegt im Falle Grönlands ungefähr zwischen 100 bis 3000 m pro Jahr. Für die<br />
Testmessung wurden daher vier verschieden schnelle Bewegungen gewählt:<br />
70 m / Jahr ̂= 0,192 m / Tag ̂= 2 mm / 15 min<br />
210 m / Jahr ̂= 0,576 m / Tag ̂= 6 mm / 15 min<br />
350 m / Jahr ̂= 0,960 m / Tag ̂= 1 cm / 15 min<br />
700 m / Jahr ̂= 1,920 m / Tag ̂= 2 cm / 15 min<br />
Größere Bewegungen als 700 m pro Jahr müssen nicht simuliert werden, da sie ohnehin leichter<br />
erfassbar sind. Eis bewegt sich kontinuierlich. Da es jedoch nicht möglich ist eine gleichmäßige kontinuierliche<br />
Bewegung zu simulieren, wurde die Messung in Abschnitte von je 15 Minuten unterteilt.<br />
Nach Ablauf dieser Zeit wurde die <strong>GPS</strong> Antenne um den jeweiligen Betrag verschoben.<br />
Grönland ist ein relativ flaches Land, in dem nahezu keine natürlichen Sichthindernisse den Empfang<br />
von <strong>GPS</strong> Signalen beeinträchtigen. Daher musste auch für die Testmessung ein Ort ohne Sichthindernisse<br />
gefunden werden. Am besten eignete sich hierzu das Dach des Labors für geodätische<br />
Messtechnik der TFH, da hier keine nennenswerten Abschattungen bestehen.<br />
Zur Messung wurden Trimble Zephyr Antennen mit Groundplane zusammen mit Trimble 5700<br />
Empfängern verwendet. Geräte von diesem Typ kamen auch bei der Grönlanddurchquerung 2002<br />
zum Einsatz.<br />
52
Um sicherzustellen, dass Messungen zu allen sichtbaren Satelliten aufgezeichnet werden, wurde für<br />
die Geräte folgende Konfiguration verwendet:<br />
Vermessungstyp : NV Kinematisch<br />
Aufzeichnungsrate : 1,0 sec<br />
min. Elevation : 0 ◦<br />
max. zulässiger PDOP : 20,0<br />
Eine annähernd geradlinige Bewegung wurde dadurch erreicht, dass die Messung selbst auf einem<br />
Tisch durchgeführt wurde, auf dem Latten befestigt waren (s. Abb. 5.1). Die <strong>GPS</strong> Antennen wurden in<br />
Dreifüße montiert und auf den Tisch gestellt. Die Latten dienten als eine Art Führungsschiene. Zudem<br />
waren an den Latten Markierungen in den Abständen der jeweiligen Bewegungsgröße angebracht,<br />
so dass die Verschiebungen direkt dort abgelesen werden konnten. Da sich das Eis in Grönland<br />
vornehmlich in Ost-West-Richtung bewegt, wurden auch bei der Testmessung die Führungslatten<br />
dahingehend ausgerichtet. Um Mehrwegeausbreitungseffekte durch Reflektion der Signale an der<br />
glatten Tischoberfläche zu minimieren, wurde diese zusätzlich mit einem Tuch bedeckt.<br />
6 mm à 15 min 2 mm à 15 min<br />
Tischplatte<br />
2 cm à 15 min<br />
Abbildung 5.1: Messanordnung, 1.Termin am 29. April 2005<br />
5.2 Messungsdurchführung<br />
Die Messungen selbst konnten nicht an einem einzigen Termin durchgeführt werden, da an der TFH<br />
Berlin nur drei <strong>GPS</strong>-Ausrüstungen des gleichen Typs vorhanden sind.<br />
Der erste Termin fand am Freitag, 29. April 2005 statt. Daten wurden dabei für die Stunden von<br />
8:00-21:00 Uhr (<strong>GPS</strong>-Zeit + 2 h) aufgezeichnet. Diese maximale Zeitspanne war durch die Öffnungszeiten<br />
des Hauses gegeben und konnte leider nicht verlängert werden.<br />
Bereits beim ersten Termin wurden, wie in Abbildung 5.1 zu sehen ist, drei der insgesamt vier Messungen<br />
durchgeführt. Da es sich bei den verwendeten Trimble Zephyr Antennen um aktive Antennen<br />
handelt, können sich diese unter Umständen gegenseitig beeinflussen. Durch den Vergleich der Ergebnisse<br />
des ersten Termins und der Ergebnisse der einzelnen Messung beim zweiten Termin, konnte<br />
jedoch festgestellt werden, dass dies nicht der Fall war.<br />
53
Der zweite Termin fand dann schließlich am Donnerstag, 02. Juni 2005 statt. Die Aufzeichnung<br />
startete um 7:15 Uhr und endete um 19:30 Uhr (<strong>GPS</strong>-Zeit + 2 h).<br />
Vorab wurde die Satellitenkonstellation an beiden Tagen mit der Planungssoftware von Trimble 12<br />
überprüft. Das Programm lieferte für die Einstellungen, Standort Berlin, Mindestelevation 5 ◦ und<br />
Hindernisse 0%, eine Gesamtzahl der Satelliten von 28, eine maximale Elevation von 85 ◦ , einen<br />
maximalen PDOP von 2,4 und eine Sichtbarkeit zwischen 7-11 Satelliten.<br />
Abbildung 5.2: Durchführung der Messung<br />
Insgesamt verliefen die Messungen ohne nennenswerte Zwischenfälle, wie geplant. Eine kleine Besonderheit<br />
war jedoch durch die geringe eingestellte Elevation von 0 ◦ gegeben. Um Signalunterbrechungen<br />
möglichst zu vermeiden, konnte man sich, um die Antenne ein Stück weiter zu schieben,<br />
nur von Norden in gebückter Haltung nähern.<br />
Bewegungsgröße Beobachtung Dauer <strong>zur</strong>ückgelegte Strecke<br />
Datum, von - bis<br />
70 m / Jahr 29. Mai, 8:00 - 21:00 Uhr 13 h 51 · 2 mm = 10, 2 cm<br />
210 m / Jahr 29. Mai, 8:00 - 19:50 Uhr 11 h50’ 47 · 6 mm = 28, 2 cm<br />
350 m / Jahr 02. Juni, 7:15 - 19:30 Uhr 12 h15’ 48 · 1 cm = 48, 0cm<br />
700 m / Jahr 29. Mai, 8:00 - 21:00 Uhr 13 h 51 · 2 cm = 1, 02m<br />
Tabelle 5.1: Übersicht der gesammelten Beobachtungen<br />
Die komprimierten Beobachtungsdaten wurden anschließend mit der Trimble Software ausgelesen<br />
und im RINEX Format abgelegt.<br />
1 http://www.trimble.com/planningsoftware.html, Juni 2005<br />
2 http://www.trimble.com/gpsdataresources.html, Juni 2005<br />
54
Kapitel 6<br />
Auswertung der Simulation<br />
6.1 Grundlegendes<br />
6.1.1 Basisstationen<br />
Ein Schwerpunkt der Auswertung liegt darin, den Zusammenhang zwischen Basislinienlänge und<br />
Auswerteergebnis zu untersuchen. Die verwendeten Basisstationen sollten aus diesem Grund in unterschiedlichen<br />
Entfernungen vom Aufnahmeort Berlin liegen. Die einfachste Variante ist auf die fest<br />
installierten Stationen des Satellitenpositionierungsdienst der deutschen Landesvermessung (SAPOS)<br />
<strong>zur</strong>ückzugreifen. Generelle Informationen zu SAPOS finden sich im Internet 1 . Die Daten der entsprechenden<br />
Stationen wurden der TFH Berlin <strong>zur</strong> Bearbeitung der Diplomarbeit von den Landesvermessungsbehörden<br />
Brandenburg und Niedersachsen freundlicherweise kostenfrei überlassen.<br />
Ingesamt wurden <strong>zur</strong> Auswertung fünf Stationen verwendet (s. Tabellen 6.1 und 6.2).<br />
Station Brandenburg Perleberg<br />
Entfernung 55 km 115 km<br />
Empfänger Zeiss GePoS RM 24 Zeiss GePoS RM 24<br />
Antenne ADVNULLANTENNA ADVNULLANTENNA<br />
(entspr. Dorne Margoline T) (entspr. Dorne Margoline T)<br />
Aufzeichnungsrate 1 sec 1 sec<br />
Tabelle 6.1: Verwendete SAPOS Stationen des Landes Brandenburg<br />
Station Braunschweig Hameln Oldenburg<br />
Entfernung 195 km 277 km 353 km<br />
Empfänger Trimble 4700 Trimble 4700 Trimble 4700<br />
Antenne Trimble Microcentered Trimble Microcentered Trimble Microcentered<br />
mit Groundplane mit Groundplane mit Groundplane<br />
Aufzeichnungsrate 1 sec 1 sec 1 sec<br />
Tabelle 6.2: Verwendete SAPOS Stationen des Landes Niedersachsen<br />
1 http://www.sapos.de/, Juli 2005<br />
55
6.1.2 Auswertesoftware<br />
Die Prozessierung der Daten erfolgte mit der Software <strong>GPS</strong>urvey der Firma Trimble. <strong>GPS</strong>urvey ist<br />
der Vorgänger des Programms Trimble Geomatics Office (TGO).<br />
Die Entscheidung für eine Software <strong>zur</strong> Auswertung, die schon seit mehreren Jahren nicht mehr programmtechnisch<br />
gepflegt wird, hatte mehrere Gründe.<br />
Trimble Total Control, welches ursprünglich <strong>zur</strong> Prozessierung verwendet werden sollte, lieferte keine<br />
akzeptablen Ergebnisse. Sogar eine relativ kurze Basislinie zwischen zwei SAPOS Stationen, welche<br />
über einen Zeitraum von mehr als zwölf Stunden beobachtet wurde, konnte nicht mit einer ausreichenden<br />
Genauigkeit bestimmt werden.<br />
<strong>GPS</strong>urvey gilt zwar als ein relativ langsames Auswerteprogramm, jedoch auch als ein sehr stabiles.<br />
Viele der Prozessierungsparameter die es bietet, sind bei seinem Nachfolger TGO nicht mehr vorhanden.<br />
Im Gegensatz dazu haben sich jedoch viele der in der neuen Version <strong>zur</strong> Berechnung verwendeten<br />
Standardalgorithmen nicht wesentlich verändert.<br />
6.2 Auswertung in kurzen Zeitfenstern (Pseudokinematik)<br />
Die Pseudokinematische Auswertung der Simulationsdaten folgte zum großen Teil der entsprechenden<br />
Auswertung der Grönlanddaten in Abschnitt 4.3. Auch hier wurde der gesamte Datensatz in kurze<br />
Zeitfenster zerlegt und diese dann statisch prozessiert. Die gewonnenen Punkte wurden ebenfalls in<br />
ein topozentrisches Koordinatensystem überführt, und in diesem mit Hilfe der Ausgleichungsrechung<br />
über lineare Regression eine Bewegungsrichtung und eine Bewegungsgröße bestimmt.<br />
Das <strong>zur</strong> Berechnung der Grönlanddaten erstellte Mathcad Dokument konnte so nach einigen Veränderungen<br />
auch zum Auswerten der Simulationsdaten benutzt werden. Die Änderungen waren nötig, da<br />
die benutzte Auswertesoftware <strong>GPS</strong>urvey nach der Prozessierung Positionskoordinaten nur als ellipsoidische<br />
Koordinaten ausgeben kann und nicht wie das zuvor verwendete TTC als kartesische<br />
Koordinaten.<br />
Aus den gegebenen ellipsoidischen Koordinaten (ϕ, λ, h) berechnen sich die zugehörigen kartesischen<br />
Koordinaten über folgenden Zusammenhang:<br />
⎛<br />
⎜<br />
⎝<br />
X<br />
Y<br />
Z<br />
⎞<br />
⎟<br />
⎠ =<br />
⎛<br />
⎜<br />
⎝<br />
(N + h) cos ϕ cos λ<br />
(N + h)cos ϕ sin λ<br />
(( 1 − e<br />
2 ) N + h ) sinϕ<br />
⎞<br />
⎟<br />
⎠ (6.1)<br />
wobei<br />
N (ϕ) = √<br />
a<br />
1−e 2 sin 2 ϕ<br />
e 2 = f · (2 − f)<br />
a = 6 378 137.000 m<br />
f = 1 : 298.2572221<br />
Normal- oder Querkrümmungsradius<br />
Quadtrat der ersten numerischen Exzentrizität<br />
Große Halbachse GRS-80 Ellipsoid<br />
Abplattung GRS-80 Ellipsoid<br />
Zudem entfiel bei der Auswertung der Simulation die Berechnung einer voraussichtlichen Punktlage<br />
sowie eines Suchfensters. Als Überblick wird hier noch einmal der sich ergebende Ablauf der Auswertung<br />
angegeben. Alle Schritte und verwendeten Formeln wurden in ausführlicherer Form schon in<br />
Abschnitt 4.3 angegeben.<br />
56
1. Die im RINEX Format abgespeicherten Beobachtungen der Simulation werden mit dem Hilfsprogramm<br />
Rinexcut in einzelne Zeitfenster zerlegt. Dies geschieht für jeden Datensatz drei Mal,<br />
für Intervalle mit einer Länge von drei, vier und fünf Stunden und einer zeitlichen Verschiebung<br />
von jeweils einer halben Stunde. Die Bezeichnung der neu entstandenen Punkte als auch<br />
Dateien setzt sich wiederum aus dem Punktnamen der Ursprungsdatei und dem Zeitpunkt der<br />
ersten Beobachtung (in Minuten des jeweiligen Tages) zusammen.<br />
2. Die erhaltenen Datensätze wurden nun mit dem Auswerteprogramm <strong>GPS</strong>urvey statisch ausgewertet.<br />
Als Basisstationen dienten die bereits in Abschnitt 6.1.1 beschriebenen SAPOS Stationen<br />
Brandenburg, Perleberg, Braunschweig, Hameln und Oldenburg. Auf Grund des hohen<br />
Rechenaufwands konnten aus allen prinzipiell möglichen Kombinationen nur diejenigen berechnet<br />
werden, die als sinnvoll erschienen. Schon allein mit diesen betrug die reine Rechenzeit<br />
knapp sechs Tage. Die gewählten Kombinationen sind den Ergebnissen zu entnehmen.<br />
Die Werte der Prozessierungsparameter entsprachen nahezu denen der Grönlandauswertung<br />
und wurden bereits in Kapitel 3 erläutert. Hier nochmals eine Zusammenfassung:<br />
Mindestelevation : 10 ◦<br />
Frequenz : L c (ionosphärenfreie Linearkombination)<br />
Lösungstyp : Brandenburg Fixed, alle anderen Float<br />
Troposphärenmodell : Niell<br />
Meteorologisches Modell : MSIS<br />
Bahndaten : präzise Ephemeriden des IGS<br />
Berechnungsintervall : 1 sec<br />
Ebenso wie TTC liefert auch <strong>GPS</strong>urvey zu jeder berechneten Koordinate eine Angabe über<br />
ihre Genauigkeit. Die ausgegebenen mittleren Fehler nahezu aller Punkte lagen unter 10 mm.<br />
3. Damit die Auswertung fortgesetzt werden konnte, mussten alle ellipsoidischen Koordinatenangaben<br />
mit den Zusammenhängen aus (6.1) in eine kartesische Form gebracht werden. Um<br />
numerische Probleme bei den folgenden Berechnungen zu vermeiden, wurde für jede simulierte<br />
Bewegungsgröße von den Koordinaten der einzelnen Zeitfenster jeweils die Koordinate des<br />
entsprechenden Schwerpunkts abgezogen.<br />
4. Nun folgte die Transformation der so gewonnenen Koordinatenunterschiede im geozentrischen<br />
Koordinatensystem über die Gleichung (4.3) in ein topozentrisches Koordinatensystem. Als<br />
Topozentrum wurde der jeweilige Schwerpunkt eingesetzt.<br />
5. Die Bewegungsrichtungen wurden zwischen allen in die u-v-Ebene projizierten Punkten einer<br />
Messung durch Bestimmung einer ausgleichenden Geraden ermittelt. Dabei ließ sich für den<br />
berechneten Wert auch ein mittlerer Fehler angeben.<br />
6. Die projizierte Gesamtbewegung eines Empfängers wurde, wie schon bei der Auswertung der<br />
Grönlanddaten, dadurch bestimmt, dass sie in eine zeitliche Verschiebung in Nord- und in<br />
Ostrichtung, respektive in Verschiebungen entlang der u- und v-Achse zerlegt wurde. Zwischen<br />
den im u-t bzw. v-t-Diagramm abgebildeten Punkten ließen sich nun wiederum ausgleichende<br />
Geraden bestimmen. Die beiden so gewonnenen Geradensteigungen repräsentieren ein Maß für<br />
die zeitliche Änderung der Empfängerposition in Nord- bzw. Ostrichtung und lassen sich zu<br />
einer Gesamtbewegung zusammenfassen.<br />
7. Schließlich ließ sich über die Fehlerfortpflanzung aus den mittleren Fehlern der beiden Einzelbewegungen<br />
noch ein Maß für den mittleren Fehler der Gesamtbewegung berechnen.<br />
Die Ergebnisse befinden sich als Tabelle A.2 im Anhang. Als reine Zahlenwerte sind sie jedoch schwer<br />
zu interpretieren. Im folgenden Abschnitt wird daher versucht diese näher zu erläutern.<br />
57
6.3 Bewertung der Ergbnisse<br />
Aus den vorliegenden Ergebnissen allgemeine Gesetzmäßigkeiten abzuleiten ist natürlich nicht<br />
möglich: Zu gering sind die Messungen und mit zu vielen speziellen Fehlern behaftet. Daher kann<br />
die nachfolgende Auswertung auch nur einen möglichen Weg aufzeigen. Um umfassende Aussagen<br />
treffen zu können, müsste noch eine wesentlich größere Anzahl an Messungen durchgeführt werden.<br />
6.3.1 Innere Genauigkeit der Bewegungsgröße<br />
Als Maß für die innere Genauigkeit der Bewegungsgröße kann der ebenfalls bei der Berechnung bestimmte<br />
mittlere Fehler mṡ angesehen werden.<br />
Es liegt die Vermutung nahe, dass sich mit zunehmender Entfernung der Basisstation vom Empfänger<br />
die innere Genauigkeit der Ergebnisse verschlechtert. Die Frage ist, in Abhängigkeit von der Entfernung,<br />
von welcher Größe eine Bewegung sein muss, damit sie mit dem Verfahren der Pseudokinematischen<br />
Auswertung sicher erfasst wird.<br />
Dazu werden die Ergebnisse der Berechnung nach ihrer Entfernung vom Empfänger sortiert. Aus den<br />
für die einzelnen Bewegungsgrößen vorliegenden mittleren Fehlern mṡ wird über folgenden Zusammenhang<br />
ein Mittelwert mṡ,DIST gebildet.<br />
mṡ,DIST =<br />
√<br />
[mṡmṡ]<br />
n<br />
(6.2)<br />
Dieses Vorgehen ist jedoch nur korrekt, wenn man davon ausgeht, dass die zu einem Mittelwert<br />
zusammengefassten Werte den gleichen Einflüssen unterliegen, d.h. in diesem Fall, eine Abhängigkeit<br />
von der Größe der Bewegung nicht vorliegt. Dies kann jedoch nicht ausgeschlossen werden und wird<br />
erst später untersucht. Da jedoch die in einem Mittelwert zusammengefassten Bewegungsgrößen für<br />
jede Entfernung gleich sind, wird angenommen, dass sich ein Fehler auf alle diese Mittelwerte gleich<br />
auswirkt.<br />
Nach den Gesetzen der Normalverteilung befinden sich ≈ 68, 3% der berechneten Werte innerhalb der<br />
Grenzen des einfachen mittleren Fehlers. Um jedoch ≈ 99, 7 % aller berechneten Werte zu erfassen,<br />
muss der mittlere Fehler mit dem Faktor drei multipliziert werden.<br />
Als Ergebnis erhält man den Betrag einer Geschwindigkeit. Dieser Geschwindigkeit ist ein bestimmter<br />
Zeitraum zugeordnet, der der Länge des Auswertezeitraums entspricht. In diesem Fall liegt seine Länge<br />
zwischen 7 h 30’ und 9 h. Um eine sichere Aussage zu treffen, muss der günstigste Fall, also 9 h,<br />
gewählt werden. Der dreifache Mittelwert liefert damit ein Maß für eine Geschwindigkeit mit der sich<br />
ein Punkt bzw. ein Empfänger in einer bestimmten Entfernung von einer Basisstation über einen<br />
Zeitraum von 9 h bewegen muss, damit diese Bewegung sicher erfasst werden kann.<br />
Diese Auswertung ließe sich natürlich auch für einen Auswertezeitraum kleiner 9 h durchführen. Da<br />
jedoch die Länge eines Intervalls meist schon bei 4 h lag, ergibt sich einfach zu wenig Datenmaterial<br />
für eine sinnvolle Berechnung.<br />
Abbildung 6.1 stellt die Ergebnisse graphisch dar. Die Darstellung entspricht jedoch nicht den Erwartungen.<br />
Die benötigte Bewegungsgröße nimmt nicht wie angenommen mit der Entfernung ab.<br />
Ganz im Gegenteil: Die am weitesten entfernte Station Oldenburg weißt sogar das beste Ergebnis<br />
auf. Darüber hinaus zeigen die Werte auch keinen stetigen Verlauf, sondern variieren zwischen den<br />
Stationen stark.<br />
58
90<br />
80<br />
70<br />
Bewegungsgröße [m/Jahr]<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
50 100 150 200 250 300 350 400<br />
3 m ṩ<br />
m s<br />
Entfernung von der Basisstation [km]<br />
Abbildung 6.1: Kleinste erfassbare Bewegung in Abhängigkeit von der Entfernung <strong>zur</strong> Basisstation für einen<br />
Auswertezeitraum von 9 h<br />
Eine mögliche Erklärung für dieses Verhalten liegt in der einfachen Modellvorstellung die in dieser<br />
Auswertung benutzt wurde. Die berechneten mittleren Fehler wurden nur in Relation <strong>zur</strong> Entfernung<br />
zwischen Basisstation und Empfänger gesetzt. Stillschweigend wurde dabei angenommen, dass alle<br />
restlichen Fehlereinflüsse gleich, bzw. unbedeutend geringer sind. Dies ist jedoch augenscheinlich<br />
nicht der Fall. Die stationsabhängigen Fehlereinflüsse überragen auf den ersten Blick bei weitem die<br />
entfernungsabhängigen Fehlereinflüsse.<br />
Betrachtet man die Ergebnisse der Berechnung aus Abschnitt 6.2 genauer, lässt sich noch etwas anderes<br />
erkennen. Der berechnete mittlere Fehler der Bewegung scheint, unabhängig von der Entfernung<br />
zwischen Basis und Rover, mit der Größe der in einem Intervall (Zeitfenster) zusammengefassten<br />
Positionsänderung zuzunehmen.<br />
Tabelle 6.3 zeigt eine Gegenüberstellung der mittleren Fehler mṡ und der während eines Intervalls<br />
<strong>zur</strong>ückgelegten Strecke ∆s I .<br />
Brandenburg Perleberg Braunschweig Hameln Oldenburg<br />
∆s I [mm] mṡ ∆s I [mm] mṡ ∆s I [mm] mṡ ∆s I [mm] mṡ ∆s I [mm] mṡ<br />
24 2, 2 32 11, 8 32 11, 1 32 12, 2 40 5, 6<br />
96 6, 1 96 17, 8 96 16, 1 96 36, 5 96 16, 1<br />
160 19, 6 160 22, 5 160 15, 9 160 28, 5 160 14, 7<br />
320 25, 3 320 37, 9 320 15, 9 320 24, 2 320 13, 9<br />
Tabelle 6.3: In einem Intervall <strong>zur</strong>ückgelegte Strecke ∆s I und mitteler Fehler der Bewegungsgröße mṡ<br />
Nun lassen sich, wiederum in Abhängigkeit von der <strong>zur</strong>ückgelegten Strecke, Mittelwerte für die<br />
mittleren Fehler der Bewegung bilden. Der Zusammenhang (6.2) gilt sinngemäß.<br />
59
40<br />
35<br />
Mittlerer Fehler der Bewegungsgröße [m/Jahr]<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 50 100 150 200 250 300 350 400<br />
Einzelwerte<br />
Mittelwerte<br />
In einem Intervall zusammengefasste Bewegung [mm]<br />
Abbildung 6.2: Abhängigkeit der inneren Genauigkeit von der während eines Intervalls <strong>zur</strong>ückgelegten Strecke<br />
In Abbildung 6.2 sind die Ergebnisse anschaulich dargestellt. Der Graph zeigt einen stetig ansteigenden<br />
Verlauf und untermauert somit die aufgestellte Vermutung.<br />
6.3.2 Äußere Genauigkeit der Bewegungsgröße<br />
Das Vorgehen <strong>zur</strong> Betrachtung der äußeren Genauigkeit der Bewegungsgröße ist ähnlich. Auch hier<br />
wird grundsätzlich davon ausgegangen, dass sich die Genauigkeit der Ergebnisse mit zunehmender<br />
Entfernung zwischen Basis und Rover verschlechtert. Die Betrachtungen gelten für einen Auswertezeitraum<br />
von 9 h.<br />
Dazu werden wieder die Ergebnisse der Berechnung nach ihren Entfernungen vom Empfänger sortiert.<br />
Da der Empfänger bei der Simulation mit einer sehr genau bestimmten Geschwindigkeit bewegt<br />
wurde, stehen der berechneten Bewegungsgröße wahre Werte gegenüber. Mit diesen lässt sich der<br />
Vektor der wahren Abweichung oder wahren Residuen ε berechnen:<br />
⎛ ⎞ ⎛<br />
ε 1<br />
ε 2<br />
ε =<br />
⎜ ⎟<br />
⎝ .<br />
= ⎜<br />
⎠ ⎝<br />
ε n<br />
l 1 − ˜X<br />
l 2 − ˜X<br />
.<br />
l n − ˜X<br />
⎞<br />
⎟<br />
⎠<br />
(6.3)<br />
Dabei bezeichnen l i die berechneten Bewegungsgrößen ṡ und ˜X den zugehörigen wahren Wert der<br />
Bewegung.<br />
Als Genauigkeitsmaß für die jeweilige Entfernung kann die empirische Varianz einer Messung s 2 0,DIST<br />
oder ihre empirische Standardabweichung s 0,DIST angegeben werden.<br />
s 2 0,DIST = 1 n εT ε = 1 n∑<br />
ε 2 i (6.4)<br />
n<br />
i=1<br />
60
Die Einschränkungen, die bereits bei der Betrachtung der inneren Genauigkeit gemacht wurden, gelten<br />
auch hier. Als korrekt kann dieses Verfahren nur angesehen werden, wenn alle zusammengefassten<br />
Größen den gleichen Einflüssen unterliegen, d.h. eine Abhängigkeit von der Größe der Bewegung<br />
nicht vorliegt. Sicherlich ist dies auch hier nicht der Fall, aber um überhaupt eine äußere Genauigkeit<br />
berechnen zu können, wird dies unter der Annahme akzeptiert, dass der Fehler für alle Entfernungen<br />
gleich ist.<br />
Die Tabelle 6.4 zeigt die Ergebnisse.<br />
Brandenburg Perleberg Braunschweig Hameln Oldenburg<br />
m<br />
s 0,DIST [<br />
Jahr<br />
] 60, 1 155, 1 54, 6 60, 1 17, 5<br />
Tabelle 6.4: Empirische Standardabweichung s 0,DIST als Maß der äußeren Genauigkeit in Abhängigkeit von<br />
der Enfernung<br />
Doch Achtung, die berechneten Werte dürfen auf Grund der gemachten Kompromisse nicht als<br />
tatsächliches Fehlermaß betrachtet werden. Sie dienen lediglich dem Vergleich der einzelnen Entfernungen<br />
untereinander.<br />
Wie auch schon bei der inneren Genauigkeit zeigen die Werte keinen stetig ansteigenden Verlauf.<br />
Auch hier scheinen die stationsabhängigen Fehlereinflüsse die entfernungsabhängigen Fehlereinflüsse<br />
zu überragen.<br />
Um zu überprüfen, ob auch hier die äußere Genauigkeit, also die Größe von ε, unabhängig von der<br />
Entfernung von der Länge der in einem Intervall zusammengefassten Verschiebung abhängig ist,<br />
werden sich diese in Tabelle 6.5 gegenübergestellt. Die Verschiebung ∆s I ist dabei in Milimetern,<br />
der Betrag der wahren Abweichung ε in Metern pro Jahr angegeben.<br />
Brandenburg Perleberg Braunschweig Hameln Oldenburg<br />
∆s I |ε| ∆s I |ε| ∆s I |ε| ∆s I |ε| ∆s I |ε|<br />
24 2, 3 32 22, 9 32 18, 1 32 32, 2 40 16, 1<br />
96 1, 6 96 29, 8 96 48, 1 96 68, 8 96 2, 3<br />
160 84, 6 160 103, 0 160 34, 5 160 34, 5 160 24, 7<br />
320 85, 3 320 290, 2 320 79, 5 320 86, 3 320 18, 6<br />
Tabelle 6.5: In einem Intervall <strong>zur</strong>ückgelegte Strecke ∆s I und Betrag der wahren Abweichung |ε|<br />
Ein Relation der beiden Größen ist durchaus zu erkennen.<br />
Um den Einfluss dieser Abhängigkeit bei der Darstellung der Ergebnisse möglichst gering zu halten,<br />
werden nun abschließend die wahren Abweichungen ε nicht als absoluter sondern als relativer Wert<br />
betrachtet und als dieser für jede Entfernung in einem Mittelwert zusammengefasst.<br />
Dies geschieht jedoch wiederum nur unter der Annahme, dass die wahre Abweichung ε und die Bewegung<br />
während eines Intervalls in einem linearen Verhältnis stehen. Die stationsabhängigen Einflüsse<br />
lassen sich aber leider auch hier nicht unterdrücken.<br />
Brandenburg Perleberg Braunschweig Hameln Oldenburg ṡ [ ]<br />
m<br />
Jahr<br />
|ε| 3, 2 % 32, 7 % 25, 6 % 46, 0 % 23, 0 % 70<br />
0, 8 % 14, 2 % 22, 9 % 32, 8 % 1, 1 % 210<br />
24, 2 % 29, 4 % 9, 9 % 9, 9 % 7, 1 % 350<br />
12, 2 % 41, 5 % 11, 3 % 12, 3 % 2, 7 % 700<br />
Mittel 13, 5 % 31, 0 % 18, 7 % 29, 3 % 12, 1 %<br />
Tabelle 6.6: Betrag der wahren Abweichung |ε| relativ <strong>zur</strong> jeweiligen Bewegungsgröße ṡ<br />
61
6.3.3 Verbesserte Betrachtung<br />
Die Art und Weise, in der die innere und äußere Genauigkeit in den vorangehenden Abschnitten<br />
betrachtet wurde, ist sehr heikel. Sie kann nur mit den gemachten Einschränkungen als korrekt<br />
angesehen werden. Die getroffenen Kompromisse mussten eingegangen werden, da zu wenige und<br />
zu kurze Datensätze <strong>zur</strong> Auswertung vorlagen und somit Daten zusammengefasst wurden, die nicht<br />
nicht unabhängig voneineinander sind. Es war leider in der kurzen Zeit, die <strong>zur</strong> Bearbeitung einer<br />
Diplomarbeit vorgesehen ist, nicht möglich mehr Messungen durchzuführen.<br />
Wollte man die gemachten Aussagen auf eine breitere Basis stellen, gäbe es zwei Möglichkeiten:<br />
Zum einen könnte man, wie schon gesagt, die Anzahl der Messungen erhöhen. Stationsabhängige<br />
und andere zufällige Fehlereinflüsse würden sich dabei nicht so gravierend auswirken, sondern ihren<br />
Einfluss bei der Mittelbildung verlieren.<br />
Zum anderen könnte man mit längeren Beobachtungen bei der Auswertung anders vorgehen. Ein<br />
langer Beobachtungszeitraum ließe sich in mehrere Auswertezeiträume unterteilen, welche annähernd<br />
gleiche Konditionen besitzen. Somit könnten auch Aussagen über eine Zeitabhängigkeit getroffen<br />
werden.<br />
Die Auswertezeiträume der vorliegenden Daten liegen bei maximal 9 h. Die durchschnittliche Länge<br />
eines Zeitfensters beträgt 4 h. Würde man diesen Zeitraum nochmals unterteilen, blieben für eine<br />
sinnvolle Auswertung keine Daten.<br />
6.3.4 Genauigkeit der Richtungsbestimmung<br />
Die innere Genauigkeit der Richtungsbestimmung spiegelt sich in m α wieder. Dies ist jedoch nur der<br />
Fall, wenn alle Punkte zeitlich als auch geometrisch einen annähernd geradlinigen Verlauf zeigen (s.<br />
auch Abschnitt 4.3). Gerade bei kleineren Bewegungsgrößen ist das oft nicht der Fall. Hier hilft <strong>zur</strong><br />
Beurteilung eine visuelle Kontrolle. Die berechneten Werte für m α lagen, mit wenigen Ausnahmen,<br />
unter 3 ◦ .<br />
Um Aussagen über die äußere Genauigkeit treffen zu können, werden wahre Werte für die Bewegungsrichtung<br />
benötigt. Diese liegen leider nicht vor. Die Messungen am 29. April wurden jedoch<br />
auf einem Tisch durchgeführt auf dem parallele Führungslatten angebracht waren. Bildet man für<br />
die größte Bewegung ein Mittel aus den Ergebnissen der einzelnen Basisstationen, erhält man zwar<br />
keinen Sollwert, jedoch einen Wert mit einer hohen Genauigkeit. Die Ergebnisse für diesen Tag lassen<br />
sich nun mit diesem Wert vergleichen. Tabelle 6.7 zeigt die Abweichungen von diesem Mittelwert<br />
geordnet nach Entfernung und Bewegungsgröße.<br />
Brandenburg Perleberg Braunschweig Hameln Oldenburg ṡ [ ]<br />
m<br />
Jahr<br />
|α Mittel − α| 4, 6 ◦ 6, 9 ◦ 2, 4 ◦ 9, 1 ◦ 13, 6 ◦ 70<br />
3, 6 ◦ 0, 5 ◦ 2, 0 ◦ 4, 1 ◦ 1, 2 ◦ 210<br />
1, 8 ◦ 8, 8 ◦ 1, 4 ◦ 5, 9 ◦ 3, 5 ◦ 700<br />
Tabelle 6.7: Betrag der Abweichung des Azimuts α vom Mittelwert<br />
Sieht man einmal von der kleinsten Bewegung ab, liegen fast alle Werte unter 5 ◦ , was für die<br />
Bestimmung von Eisbewegungen vollkommen ausreichend ist.<br />
62
Kapitel 7<br />
Zusammenfassung und Schlussfolgerung<br />
Ziel dieser Diplomarbeit war es, ein Verfahren zu finden, mit dem es möglich ist Eisbewegungsparameter<br />
mit Hilfe von <strong>GPS</strong> über große Distanzen zu bestimmen. Dies ist, wenn auch mit kleinen<br />
Einschränkungen, gelungen.<br />
Die Arbeit unterteilte sich in zwei große Hauptbereiche: Zum einen die Auswertung bereits vorhandener<br />
Messdaten, die bei einer Grönlandexpedition im Sommer 2002 entstanden, zum anderen die<br />
Durchführung einer Simulationsmessung, die der Bewertung und Verbesserung des Verfahrens diente.<br />
Zur Messung wurden Zweifrequenzempfänger und Antennen des mittleren Leistungsspektrums verwendet.<br />
Die Prozessierung der Daten erfolgte mit einfachen Auswerteprogrammen.<br />
Insgesamt wurden drei Auswertestrategien angewendet. Eine rein kinematische Auswertung lieferte<br />
leider kein Ergebnis, ebenso wie der Versuch das Verfahren der Virtuellen Referenzstation auf ein<br />
Gebiet von mehreren hundert Kilometern Durchmesser auszudehnen.<br />
Einzig das Verfahren der so genannten Pseudokinematischen Auswertung zeigte Erfolg. Unter Pseudokinematischer<br />
Auswertung wird hier das Zerlegen eines Aufnahmezeitraums in relativ kurze, sich<br />
teilweise überlappende Zeitfenster verstanden, welche anschließend jeweils statisch prozessiert wurden<br />
(Dies entspricht einer gleitenden Mittelbildung von Positionsberechnungen). Die berechneten<br />
Punkte wurden daraufhin in eine lokale horizontale Ebene transformiert. Die Bestimmung einer Bewegungsrichtung<br />
erfolgte über eine ausgleichende Gerade zwischen allen projizierten Punkten. Die<br />
Gesamtbewegung wurde unterteilt in eine zeitliche Verschiebung in Nord- und in Ostrichtung. Diese<br />
ließen sich wiederum durch ausgleichende Geraden gut beschreiben.<br />
Als Resümee kann man sagen, dass sich dieses Verfahren durchaus bewährt hat. Es war damit möglich<br />
durch eine Beobachtung von nur 14 Stunden über eine Distanz von bis zu 400 Kilometern eine Bewegung<br />
von ca. 200 Meter pro Jahr mit einer Genauigkeit von 15-20 % zu bestimmen. Die Genauigkeit<br />
des Verfahrens lässt sich insgesamt mit ca. 20 % der Bewegungsgröße angeben. Es sind jedoch auch<br />
größere Schwankungen nach oben und unten möglich. So zeigte bei der Simulation der am weitesten<br />
entfernte Punkt Oldenburg die besten Ergebnisse und lag mit seiner absoluten Genauigkeit deutlich<br />
unter 10 %. Dieses Verhalten ist identisch zum Punkt Kellyville der Grönlandauswertung. Auch<br />
hier lagen augenscheinlich schlechtere Daten vor. Die Ergebnisse waren aber weitaus besser als bei<br />
Verwendung eines direkt benachbarten Punktes.<br />
Es zeigt sich also, dass die Genauigkeit der Ergebnisse nicht, wie vielleicht erwartet, in erster Linie<br />
von der beobachteten Distanz abhängt. Insbesondere stationsabhängige Fehlereinflüsse spielen eine<br />
sehr große Rolle. Zur Kontrolle der Ergebnisse kann es daher sinnvoll sein die Auswertung mit einer<br />
zweiten Basisstation durchzuführen, auch wenn diese weiter entfernt ist.<br />
Als Voraussetzungen bzw. Einschränkungen des Verfahrens sind zu nennen: Es sollte nicht für Beobachtungen<br />
kleiner als zwölf Stunden verwendet werden, da ansonsten nicht genügend Daten <strong>zur</strong><br />
63
Berechnung <strong>zur</strong> Verfügung stehen. Auch können Bewegungen von unter 200 Meter pro Jahr nicht<br />
sicher bestimmt werden. Als weiteres ist ein großes Augenmerk auf die Messkonstellation zu legen.<br />
Die verwendeten Antennen und Empfänger sollten einem gewissen Standard entsprechen. Der Messpunkt,<br />
speziell für die Basis, ist sorgsam zu wählen. In der Nähe der Antenne sollte es zu keinen<br />
störenden Einflüssen wie Abschattung, Signalbeugung und Multipath kommen. Um atmosphärische<br />
Einflüsse bei der Prozessierung besser bestimmen zu können ist die Taktrate so klein wie möglich zu<br />
wählen, im günstigsten Fall mit 1 sec.<br />
Die Wahl der richtigen Größe eines Zeitfensters (Intervall) stellt ein weiteres Problem dar. Dafür<br />
kann es keine generelle Empfehlung geben. Die richtige Zeitspanne richtet sich nach der Entfernung<br />
zwischen Basis und Rover und anderen speziellen Einflüssen. Sie darf jedoch nicht länger als notwendig<br />
gewählt werden. Mitunter sind eventuell mehrere Durchläufe nötig um den richtigen Wert zu finden.<br />
Die Simulationsmessungen wurden alle in Deutschland durchgeführt. Ziel war es jedoch zu untersuchen<br />
ob mit Hilfe von <strong>GPS</strong> Eisbewegungsparameter bestimmt werden können. Der Einsatzort dieses<br />
Verfahrens ist also ein polares Gebiet. Der größte Unterschied zwischen polaren und gemäßigten Breiten<br />
im Hinblick auf <strong>GPS</strong> besteht in den gegebenen atmosphärischen Bedingungen. Zum Zeitpunkt<br />
der Folgemessung neigt sich der Zyklus der Sonnenaktivität jedoch seinem Tiefpunkt, so dass in<br />
Grönland mit einer geringen Beeinflussung durch die Atmosphäre zu rechen ist.<br />
Auch wenn mit dem Verfahren der Pseudokinematischen Auswertung durchaus akzeptable Ergebnisse<br />
erzielbar sind, stellt es jedoch nicht die optimale Auswertestrategie dar. Als bessere Alternative wird<br />
die Prozessierung der Daten mit einer wissenschaftlichen Auswertesoftware (wie z.B. die Berner <strong>GPS</strong><br />
Software) empfohlen. Der große Vorteil liegt darin, dass solche Programme die Möglichkeit bieten das<br />
Ausgleichungsmodell an das gegebene Problem anzupassen. Zum Beispiel kann die Höhe festgehalten<br />
werden und für die Lagekoordinaten werden direkt im Ausgleichungsmodell Bewegungsparameter<br />
∆ϕ und ∆λ mitbestimmt. Es ließe sich dadurch die Stabilität einer statischen Auswertung mit der<br />
Bestimmung einer geradlinigen Bewegung kombinieren.<br />
Zum Abschluss gibt es noch zu sagen, dass die gewonnenen Erkenntnisse trotz aller Einschränkungen<br />
doch überraschen. Mit solch guten Ergebnissen, wie sie zum Beispiel die Basisstation Oldenburg<br />
lieferte, war nicht zu rechnen.<br />
64
Anhang A<br />
Berechnungsergebnisse<br />
Tabelle A.1: Vorraussichtliche Positionen 2006<br />
Camp Punkt Suchfenster<br />
X [m] Y [m] Z [m] X [m] Y [m] Z [m]<br />
05 2031976 −1647498 5798885 2032035 −1647594 5798837 −<br />
2031975 −1647598 5798857<br />
2031920 −1647420 5798926<br />
2031970 −1647381 5798920<br />
08 1989299 −1636503 5817166 1989328 −1636498 5817158 +<br />
1989301 −1636530 5817158<br />
1989272 −1636510 5817173<br />
1989296 −1636475 5817175<br />
09 1976408 −1632603 5822681 1976492 −1632612 5822650 −<br />
1976371 −1632676 5822673<br />
1976330 −1632605 5822706<br />
1976439 −1632520 5822693<br />
10 1966089 −1630264 5826887 1966130 −1630270 5826872 ◦<br />
1966072 −1630302 5826882<br />
1966050 −1630262 5826900<br />
1966105 −1630224 5826893<br />
12 1942102 −1633875 5834068 1942173 −1633868 5834046 ◦<br />
1942077 −1633939 5834059<br />
1942036 −1633888 5834086<br />
1942121 −1633803 5834082<br />
13 1928155 −1631538 5839386 1928180 −1631556 5839373 −<br />
1928141 −1631565 5839383<br />
1928130 −1631523 5839398<br />
1928167 −1631506 5839391<br />
15 1894611 −1635173 5849466 1894649 −1635188 5849449 −−<br />
1894589 −1635206 5849463<br />
1894575 −1635166 5849479<br />
1894630 −1635134 5849471<br />
17 1858749 −1648720 5857306 1858774 −1648690 5857306 −−<br />
1858734 −1648755 5857301<br />
Fortsetzung auf der nächsten Seite<br />
65
X [m] Y [m] Z [m] X [m] Y [m] Z [m]<br />
1858729 −1648753 5857303<br />
1858759 −1648683 5857313<br />
25 1703296 −1662143 5900149 1703279 −1662151 5900151 ◦<br />
1703307 −1662127 5900150<br />
1703313 −1662133 5900147<br />
1703287 −1662159 5900147<br />
27 1670862 −1665635 5908252 1670838 −1665633 5908259 ◦<br />
1670863 −1665613 5908258<br />
1670883 −1665635 5908246<br />
1670862 −1665658 5908246<br />
28 1649867 −1665562 5914032 1649847 −1665563 5914037 ◦<br />
1649872 −1665543 5914036<br />
1649886 −1665559 5914027<br />
1649863 −1665581 5914028<br />
29 1627176 −1667597 5919602 1627141 −1667612 5919607 −<br />
1627189 −1667564 5919608<br />
1627207 −1667580 5919598<br />
1627166 −1667633 5919594<br />
30 1604138 −1664408 5926702 1604078 −1664407 5926719 −<br />
1604158 −1664357 5926711<br />
1604192 −1664403 5926689<br />
1604122 −1664467 5926690<br />
31 1579073 −1669157 5931926 1579022 −1669186 5931931 −<br />
1579058 −1669108 5931943<br />
1579118 −1669127 5931922<br />
1579094 −1669208 5931906<br />
32 1555359 −1673858 5936752 1555309 −1673868 5936762 +<br />
1555367 −1673809 5936763<br />
1555408 −1673846 5936742<br />
1555353 −1673909 5936739<br />
33 1531686 −1678212 5941414 1531635 −1678222 5941424 ++<br />
1531702 −1678164 5941423<br />
1531735 −1678201 5941404<br />
1531671 −1678261 5941404<br />
34 1510754 −1683111 5945265 1510720 −1683137 5945266 ++<br />
1510746 −1683072 5945278<br />
1510788 −1683086 5945264<br />
1510764 −1683151 5945251<br />
35 1482170 −1688621 5950665 1482149 −1688637 5950666 ++<br />
1482158 −1688600 5950674<br />
1482190 −1688605 5950665<br />
1482182 −1688642 5950656<br />
36 1463344 −1691981 5954221 1463328 −1692001 5954219 ++<br />
1463343 −1691957 5954228<br />
1463360 −1691961 5954223<br />
1463346 −1692006 5954213<br />
39 1421967 −1700735 5961088 - - - −<br />
66
Tabelle A.2: Auswertungsergebnisse der Simulationsdaten<br />
Basisstation Entfernung α ber. m α α Mittel<br />
Bewegungsgröße Intervall ṡ ber. mṡ ṡ Soll<br />
Auswertezeitraum gem. Bewegung<br />
Brandenburg 55 km 90, 0 ◦ 1, 3 ◦ 94, 6 ◦<br />
70 m / Jahr 3 h 72, 3 m / Jahr 2, 2 m 70 m / Jahr<br />
9 h 0‘ 0, 072 m<br />
Brandenburg 55 km 91, 0 ◦ 0, 9 ◦ 94, 6 ◦<br />
210 m / Jahr 4 h 211, 6 m / Jahr 6, 1 m 210 m / Jahr<br />
7 h 30‘ 0, 180 m<br />
Brandenburg 55 km 97, 0 ◦ 4, 7 ◦ -<br />
350 m / Jahr 4 h 265, 4 m / Jahr 19, 6 m 350 m / Jahr<br />
8 h 0‘ 0, 320 m<br />
Brandenburg 55 km 96, 4 ◦ 1, 4 ◦ 94, 6 ◦<br />
700 m / Jahr 4 h 785, 3 m / Jahr 25, 3 m 700 m / Jahr<br />
9 h 0‘ 0, 720 m<br />
Perleberg 115 km 87, 7 ◦ 4, 7 ◦ 94, 6 ◦<br />
70 m / Jahr 4 h 47, 1 m / Jahr 11, 8 m 70 m / Jahr<br />
8 h 0‘ 0, 064 m<br />
Perleberg 115 km 95, 1 ◦ 2, 2 ◦ 94, 6 ◦<br />
210 m / Jahr 4 h 239, 8 m / Jahr 17, 8 m 210 m / Jahr<br />
7 h 30‘ 0, 180 m<br />
Perleberg 115 km 112, 2 ◦ 1, 8 ◦ -<br />
350 m / Jahr 4 h 453, 0 m / Jahr 22, 5 m 350 m / Jahr<br />
7 h 30‘ 0, 300 m<br />
Perleberg 115 km 103, 4 ◦ 1, 6 ◦ 94, 6 ◦<br />
700 m / Jahr 4 h 990, 2 m / Jahr 37, 9 m 700 m / Jahr<br />
9 h 0‘ 0, 720 m<br />
Braunschweig 195 km 86, 0 ◦ 3, 3 ◦ 94, 6 ◦<br />
70 m / Jahr 3 h 5, 1 m / Jahr 14, 1 m 70 m / Jahr<br />
9 h 30‘ 0, 076 m<br />
Braunschweig 195 km 92, 1 ◦ 3, 9 ◦ 94, 6 ◦<br />
70 m / Jahr 4 h 7, 8 m / Jahr 9, 5 m 70 m / Jahr<br />
9 h 0‘ 0, 072 m<br />
Braunschweig 195 km 98, 1 ◦ 4, 1 ◦ 94, 6 ◦<br />
70 m / Jahr 5 h 51, 9 m / Jahr 9, 2 m 70 m / Jahr<br />
8 h 0‘ 0, 064 m<br />
Braunschweig 195 km 92, 1 ◦ 1, 7 ◦ 94, 6 ◦<br />
210 m / Jahr 3 h 177, 1 m / Jahr 17, 1 m 210 m / Jahr<br />
9 h 0‘ 0, 216 m<br />
Braunschweig 195 km 92, 7 ◦ 1, 3 ◦ 94, 6 ◦<br />
210 m / Jahr 4 h 155, 4 m / Jahr 17, 8 m 210 m / Jahr<br />
8 h 0‘ 0, 192 m<br />
Braunschweig 195 km 93, 1 ◦ 1, 4 ◦ 94, 6 ◦<br />
210 m / Jahr 5 h 156, 4 m / Jahr 13, 1 m 210 m / Jahr<br />
7 h 0‘ 0, 168 m<br />
Fortsetzung auf der nächsten Seite<br />
67
Basisstation Entfernung α ber. m α α Mittel<br />
Bewegungsgröße Intervall ṡ ber. mṡ ṡ Soll<br />
Auswertezeitraum gem. Bewegung<br />
Braunschweig 195 km 102, 1 ◦ 1, 6 ◦ -<br />
350 m / Jahr 3 h 370, 5 m / Jahr 19, 2 m 350 m / Jahr<br />
9 h 0‘ 0, 360 m<br />
Braunschweig 195 km 103, 4 ◦ 1, 3 ◦ -<br />
350 m / Jahr 4 h 359, 5 m / Jahr 16, 0 m 350 m / Jahr<br />
8 h 0‘ 0, 320 m<br />
Braunschweig 195 km 109, 5 ◦ 1, 0 ◦ -<br />
350 m / Jahr 5 h 294, 6 m / Jahr 11, 4 m 350 m / Jahr<br />
7 h 0‘ 0, 280 m<br />
Braunschweig 195 km 92, 9 ◦ 0, 8 ◦ 94, 6 ◦<br />
700 m / Jahr 3 h 795, 0 m / Jahr 13, 1 m 700 m / Jahr<br />
10 h 0‘ 0, 800 m<br />
Braunschweig 195 km 92, 9 ◦ 0, 7 ◦ 94, 6 ◦<br />
700 m / Jahr 4 h 782, 4 m / Jahr 14, 5 m 700 m / Jahr<br />
9 h 0‘ 0, 720 m<br />
Braunschweig 195 km 93, 8 ◦ 0, 7 ◦ 94, 6 ◦<br />
700 m / Jahr 5 h 756, 0 m / Jahr 19, 5 m 700 m / Jahr<br />
8 h 0‘ 0, 640 m<br />
Hameln 277 km 85, 5 ◦ 5, 1 ◦ 94, 6 ◦<br />
70 m / Jahr 4 h 37, 8 m / Jahr 12, 2 m 70 m / Jahr<br />
9 h 0‘ 0, 072 m<br />
Hameln 277 km 90, 5 ◦ 3, 5 ◦ 94, 6 ◦<br />
210 m / Jahr 4 h 141, 2 m / Jahr 36, 5 m 210 m / Jahr<br />
8 h 0‘ 0, 192 m<br />
Hameln 277 km 100, 9 ◦ 1, 7 ◦ -<br />
350 m / Jahr 4 h 384, 5 m / Jahr 28, 5 m 350 m / Jahr<br />
8 h 0‘ 0, 320 m<br />
Hameln 277 km 91, 2 ◦ 0, 7 ◦ 94, 6 ◦<br />
700 m / Jahr 4 h 786, 3 m / Jahr 24, 2 m 700 m / Jahr<br />
9 h 0‘ 0, 720 m<br />
Oldenburg 353 km 108, 2 ◦ 2, 9 ◦ 94, 6 ◦<br />
70 m / Jahr 5 h 53, 9 m / Jahr 5, 6 m 70 m / Jahr<br />
8 h 0‘ 0, 064 m<br />
Oldenburg 353 km 95, 8 ◦ 1, 6 ◦ 94, 6 ◦<br />
210 m / Jahr 4 h 212, 3 m / Jahr 16, 1 m 210 m / Jahr<br />
8 h 0‘ 0, 192 m<br />
Oldenburg 353 km 106, 1 ◦ 1, 3 ◦ -<br />
350 m / Jahr 4 h 325, 3 m / Jahr 14, 7 m 350 m / Jahr<br />
8 h 0‘ 0, 320 m<br />
Oldenburg 353 km 91, 1 ◦ 0, 6 ◦ 94, 6 ◦<br />
700 m / Jahr 4 h 681, 4 m / Jahr 13, 9 m 700 m / Jahr<br />
9 h 0‘ 0, 720 m<br />
68
Anhang B<br />
ReadMe zu ”<br />
Nansen“ - Einstellungen<br />
unter Windows XP<br />
Laufzeitumgebung einrichten<br />
Die Anwendung wurde in Java geschrieben. Sie benötigt daher zu ihrer Ausführung eine geeignete<br />
Laufzeitumgebung. Voraussetzung ist das Java Runtime Environment (JRE) ab Version 1.5.0. Sollte<br />
das JRE schon auf dem Rechner installiert sein, können Sie diesen Punkt einfach überspringen.<br />
Installieren des JRE<br />
Ein geeignetes JRE befindet sich auf dem Datenträger (jre-1 5 0 03-windows-i586-p.exe) oder<br />
kann in der aktuellsten Version aus dem Internet 1 geladen werden. Eine Installationsanleitung findet<br />
sich ebenfalls auf dem Datenträger (install-windows.html).<br />
Damit die Anwendung durch Doppelklick auf die entsprechende Datei startet, müssen noch einige<br />
Einstellungen vorgenommen werden:<br />
Einrichten der Umgebungsvariablen<br />
Die Umgebungsvariable PATH ist um den Eintrag des JRE zu ergänzen. Die Einstellungen der Umgebungsvariablen<br />
finden sich bei Windows XP unter:<br />
Start → Systemsteuerung → Leistung und Wartung → System → Erweitert → Umgebungsv.<br />
Fügen sie dem vorhandenen Eintrag den absoluten Pfad ihres JRE Installationsverzeichnisses + /bin<br />
, getrennt durch ein Semikolon, zu.<br />
Beispiel: . . . ;C:\Programme\Java\jre1.5.0 03\bin<br />
Sollte die Umgebungsvariable PATH noch nicht existieren, legen Sie sie an und tragen Sie als Wert<br />
das Folgende ein: (natürlich mit Ihrem Pfad)<br />
Beispiel: .;C:\Programme\Java\jre1.5.0 03\bin<br />
1 java.sun.com, Juni 2005<br />
69
.jar als Dateityp registrieren<br />
Die Anwendung liegt als Java Archivdatei (.jar) vor. Die Ereignisbehandlung dieses Dateityps muss<br />
noch eingetragen werden.<br />
Start → Systemsteuerung → Darstellung und Designs → Ordneroptionen → Dateitypen<br />
Suchen und markieren Sie in der Liste die Erweiterung .jar und klicken Sie auf den Button ”<br />
Erweitert“<br />
und anschließend auf ”<br />
Bearbeiten“. Unter ”<br />
Anwendung für diesen Vorgang“ muss folgender<br />
Wert eingetragen sein:<br />
“[JRE Installationsverzeichnis]\bin\javaw.exe“ -jar “ %1“<br />
Beispiel: “C:\Programme\Java\jre1.5.0 03\bin\javaw.exe“ -jar “ %1“<br />
Starten der Anwendung<br />
Nun können Sie die Anwendung an jeden beliebigen Ort Ihres Computers kopieren und durch Doppelklick<br />
auf die Datei starten.<br />
Kurze Programmbeschreibung<br />
Die Anwendung wurde <strong>zur</strong> Unterstützung der Grönlandexpedition 2006 geschrieben. Bei einer vorausgehenden<br />
Expedition im Jahre 2002 wurden in der Nähe der Tagescamps magnetische Vermarkungen<br />
in das Eis eingebracht und mit <strong>GPS</strong> vermessen. Diese Punkte sollen 2006 wieder aufgesucht und erneut<br />
vermessen werden. In der Zeit zwischen den beiden Expeditionen haben sich die Punkte auf<br />
Grund von Eisbewegungen in ihrer Lage verändert. Kennt man die ungefähre Bewegungsrichtung und<br />
Bewegungsgröße des Punktes, kann der Suchbereich eingegrenzt werden. Durch Richtung und Strecke<br />
und deren Abweichungen, lässt sich ein Rechteck aufspannen, dessen Mittelpunkt die prognostizierte<br />
neue Punktlage bildet.<br />
70
Die wichtigsten Elemente der Anwendung werden durch Tool Tip Text erklärt (Einfach Mauszeiger<br />
über das Element bewegen).<br />
Hier nur noch mal eine kleine Zusammenfassung:<br />
Oberer Block<br />
Geben Sie hier bitte die Position des Punktes zum Zeitpunkt der Expedition 2002 ein. Sie können den<br />
Punkt in kartesischen oder ellipsoidischen Koordinaten eingeben. Mit der Combo Box links können<br />
Sie zwischen den beiden Systemen wählen. Nach der Berechnung wird in der unteren Zeile des oberen<br />
Blocks die Position des Punktes im jeweils anderen System angegeben. Zur Umrechnung dient das<br />
GRS-80 Ellipsoid (a = 6 378 137.000m, 1 f = 298.2572221).<br />
Mittlerer Block<br />
Hier geben Sie die Bewegungsparameter ein.<br />
Links oben legen Sie das Azimut der Bewegung fest, und darunter seinen entsprechenden mittleren<br />
Fehler. Die Combo Box links bietet die Möglichkeit das Fehlermaß als relativen Wert in Altgrad oder<br />
als absoluten Wert in Metern einzugeben.<br />
Rechts oben geben Sie die Bewegungsgröße des Punktes als Absolutbetrag (Strecke) ein, und darunter<br />
können Sie ein Fehlermaß festlegen. Auch hier haben Sie mit der Combo Box rechts die Möglichkeit<br />
das Fehlermaß als relativen Wert in Prozent oder als absoluten Wert in Metern einzugeben.<br />
Unterer Block<br />
Dies ist der Ausgabeblock. Mit der linken Combo Box können Sie zwischen einer Ausgabe in kartesischen<br />
oder ellipsoidischen Koordinaten wählen.<br />
Punkt : Die Koordinaten geben die prognostizierte neue Punktlage an und berechnen sich aus dem<br />
angegebenen Azimut und Strecke.<br />
Feld : Die vier Punkte spannen ein Suchfeld auf, dessen Breite durch den angegeben mittleren Fehler<br />
des Azimuts, und dessen Länge durch den angegebenen Streckenfehler bestimmt wird.<br />
Generell<br />
Bei der Berechung wird davon ausgegangen, dass sich die Punkthöhe nicht ändert.<br />
Bei Fragen und Fehlern: mail@stefan-knoblach.de<br />
71
Literaturverzeichnis<br />
[Bauer, 2003] Bauer, M. (2003). Vermessung und Ortung mit Satelliten - <strong>GPS</strong> und andere satellitengestützte<br />
Navigationssysteme. H. Wichmann Verlag, Heidelberg, 5 edition.<br />
[Burandt, 2003] Burandt, I. (2003). <strong>GPS</strong> Auswertung der Grönlanddurchquerung 2002. TFH Berlin.<br />
Diplomarbeit.<br />
[Depenthal, 1996] Depenthal, C. u. a. (1996). Einfluß der Atmosphäre auf <strong>GPS</strong>-Ergebnisse am<br />
Beispiel des BMBF-Verbundprojekts ”<br />
Referenznetz Antarktis II“. Universität Karlsruhe. Interner<br />
Bericht am GIK.<br />
[Görres, 2004] Görres, B. (2004). Positionierung mit <strong>GPS</strong>. Universität Bonn. Vorlesungsskriptum<br />
Wintersemester 2004.<br />
[Heck, 2003] Heck, B. (2003). Rechenverfahren und Auswertemodelle der Landesvermessung -<br />
Klassische und moderne Methoden. H. Wichmann Verlag, Heidelberg, 3 edition.<br />
[Hehl, 2005a] Hehl, K. (2005a). Ausgleichungsrechnung. TFH Berlin. Vorlesungsskriptum Wintersemester<br />
2005.<br />
[Hehl, 2005b] Hehl, K. (2005b). Landesvermessung. TFH Berlin. Vorlesungsskriptum Wintersemester<br />
2005.<br />
[Hehl, 2005c] Hehl, K. (2005c). Ortsbestimmung und Positionierung. TFH Berlin. Vorlesungsskriptum<br />
Sommersemester 2005.<br />
[Hofmann-Wellenhof, 2001] Hofmann-Wellenhof, B. u. a. (2001). Global Positioning System -<br />
Theory and Practice. Springer Verlag, Wien, 5 edition.<br />
[Huck, 2004] Huck, B. u. a. (2004). Auswirkungen des Weltraumwetters auf präzise GNSS-<br />
Positionierung - SWIPPA - Ein ESA-Projekt der ALLSAT mit der DLR. Der Vermessungsingenieur.<br />
[Hugentobler, 2000] Hugentobler, U. (2000). Der Internationale <strong>GPS</strong> Service (IGS) und seine Produkte.<br />
Universität Bern.<br />
[Joughin, 1996] Joughin, I. u. a. (1996). Estimation of ice-sheet motion using satellite radar interferometry<br />
- Method and error analysis with application to Humboldt Glacier, Greenland. Journal<br />
of Glaciology. No. 142, S. 564-575.<br />
[Kahmen, 1997] Kahmen, H. (1997). Vermessungskunde. Walter de Gruyter, Berlin.<br />
[Kargoll, 2000] Kargoll, B. (2000). Einfluß von <strong>GPS</strong>-Beobachtungen in niedrigen Elevationen auf die<br />
Troposphärenmodellierung. Universität Karlsruhe. Diplomarbeit.<br />
[Korth, 1998] Korth, W. (1998). Bestimmung von Oberflächengeometrie, Punktbewegungen und<br />
Geoid in einer Region der Antarktis. PhD thesis, TU Dresden.<br />
72
[Korth, 2004] Korth, W. (2004). Vermessungskunde 3. TFH Berlin. Vorlesungsskriptum Wintersemester<br />
2004.<br />
[Leica, 2000] Leica (2000). Einführung in die <strong>GPS</strong> Vermessung. Leica Geosystems AG.<br />
[Liebsch, 2000] Liebsch, G. (2000). Linearkombinationen. Arbeitsblatt.<br />
[Mader, 2001] Mader, G. (2001). <strong>GPS</strong> Antenna Calibration. National Geodetic Survey.<br />
[Möser, 2000] Möser, M. u. a. (2000). Handbuch Ingenieurgeodäsie, Grundlagen. H. Wichmann<br />
Verlag, Heidelberg.<br />
[Niemeier, 2002] Niemeier, W. (2002). Ausgleichungsrechnung. Walter de Gruyter, Berlin.<br />
[Rothacher, 2004] Rothacher, M. (2004). Satellitengeodäsie I - Einführung in <strong>GPS</strong>. TU München.<br />
Vorlesungsskriptum Sommersemester 2004.<br />
[Seeber, 1989] Seeber, G. (1989). Satellitengeodäsie. Walter de Gruyter, Berlin.<br />
[Tiemeyer, 2001] Tiemeyer, B. (2001). Performance Evaluation of Satellite Navigation and Safety<br />
Case Development. PhD thesis, Universität der Bundeswehr München.<br />
[Wanninger, 2000a] Wanninger, L. u. a. (2000a). Der Einfluß der Signalbeugung auf präzise Positionierung<br />
mit <strong>GPS</strong>. TU Dresden. ZfV.<br />
[Wanninger, 1999] Wanninger, L. (1999). The Performance of Virtual Reference Stations in Active<br />
Geodetic <strong>GPS</strong>-networks under Solar Maximum Conditions. TU Dresden. ION <strong>GPS</strong> 1999.<br />
[Wanninger, 2000b] Wanninger, L. (2000b). Der Einfluß der Ionosphäre auf die Positionierung in<br />
Referenzstationsnetzen. TU Dresden.<br />
[Wanninger, 2002a] Wanninger, L. (2002a).<br />
Antennenkalibrierung. ZfV.<br />
Möglichkeiten und Grenzen der relativen <strong>GPS</strong>-<br />
[Wanninger, 2002b] Wanninger, L. (2002b). Virtual Reference Stations for Centimeter-Level Kinematic<br />
Positioning. TU Dresden. ION <strong>GPS</strong> 2002.<br />
73
Erklärung<br />
Ich versichere hiermit, dass ich die vorliegende Arbeit selbständig verfasst und keine anderen als die<br />
im Literaturverzeichnis angegebenen Quellen benutzt habe.<br />
Stellen, die wörtlich oder sinngemäß aus veröffentlichten oder noch nicht veröffentlichten Quellen<br />
entnommen sind, sind als solche kenntlich gemacht.<br />
Die Zeichnungen oder Abbildungen in dieser Arbeit sind von mir selbst erstellt worden oder mit einem<br />
entsprechenden Quellennachweis versehen.<br />
Diese Arbeit ist in gleicher oder ähnlicher Form noch bei keiner anderen Prüfungsbehörde eingereicht<br />
worden.<br />
Berlin, 18.Juli 2005<br />
Unterschrift: