Kinematisches GPS zur Deformationsbestimmung - Beuth ...
Kinematisches GPS zur Deformationsbestimmung - Beuth ...
Kinematisches GPS zur Deformationsbestimmung - Beuth ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
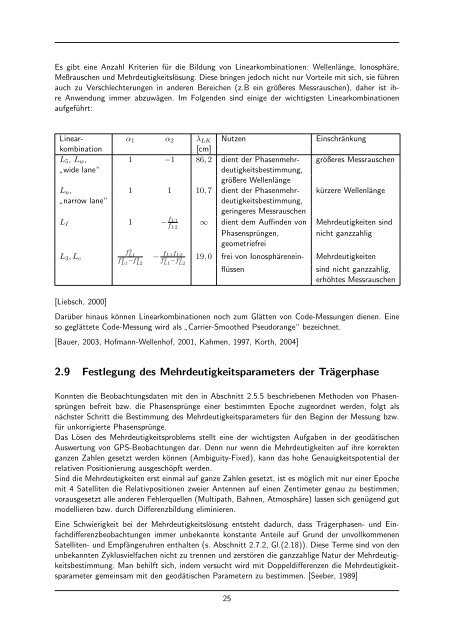
Es gibt eine Anzahl Kriterien für die Bildung von Linearkombinationen: Wellenlänge, Ionosphäre,<br />
Meßrauschen und Mehrdeutigkeitslösung. Diese bringen jedoch nicht nur Vorteile mit sich, sie führen<br />
auch zu Verschlechterungen in anderen Bereichen (z.B ein größeres Messrauschen), daher ist ihre<br />
Anwendung immer abzuwägen. Im Folgenden sind einige der wichtigsten Linearkombinationen<br />
aufgeführt:<br />
Linear- α 1 α 2 λ LK Nutzen Einschränkung<br />
kombination<br />
[cm]<br />
L 5 , L w , 1 −1 86, 2 dient der Phasenmehr- größeres Messrauschen<br />
wide lane“ deutigkeitsbestimmung,<br />
”<br />
größere Wellenlänge<br />
L n , 1 1 10, 7 dient der Phasenmehr- kürzere Wellenlänge<br />
narrow lane“ deutigkeitsbestimmung,<br />
”<br />
geringeres Messrauschen<br />
L I 1 − f L1<br />
f L2<br />
∞ dient dem Auffinden von Mehrdeutigkeiten sind<br />
Phasensprüngen, nicht ganzzahlig<br />
geometriefrei<br />
L 3 , L c<br />
[Liebsch, 2000]<br />
f 2 L1<br />
f 2 L1 −f2 L2<br />
− f L1f L2<br />
f 2 L1 −f2 L2<br />
19, 0 frei von Ionosphärenein- Mehrdeutigkeiten<br />
flüssen<br />
sind nicht ganzzahlig,<br />
erhöhtes Messrauschen<br />
Darüber hinaus können Linearkombinationen noch zum Glätten von Code-Messungen dienen. Eine<br />
so geglättete Code-Messung wird als ”<br />
Carrier-Smoothed Pseudorange“ bezeichnet.<br />
[Bauer, 2003, Hofmann-Wellenhof, 2001, Kahmen, 1997, Korth, 2004]<br />
2.9 Festlegung des Mehrdeutigkeitsparameters der Trägerphase<br />
Konnten die Beobachtungsdaten mit den in Abschnitt 2.5.5 beschriebenen Methoden von Phasensprüngen<br />
befreit bzw. die Phasensprünge einer bestimmten Epoche zugeordnet werden, folgt als<br />
nächster Schritt die Bestimmung des Mehrdeutigkeitsparameters für den Beginn der Messung bzw.<br />
für unkorrigierte Phasensprünge.<br />
Das Lösen des Mehrdeutigkeitsproblems stellt eine der wichtigsten Aufgaben in der geodätischen<br />
Auswertung von <strong>GPS</strong>-Beobachtungen dar. Denn nur wenn die Mehrdeutigkeiten auf ihre korrekten<br />
ganzen Zahlen gesetzt werden können (Ambiguity-Fixed), kann das hohe Genauigkeitspotential der<br />
relativen Positionierung ausgeschöpft werden.<br />
Sind die Mehrdeutigkeiten erst einmal auf ganze Zahlen gesetzt, ist es möglich mit nur einer Epoche<br />
mit 4 Satelliten die Relativpositionen zweier Antennen auf einen Zentimeter genau zu bestimmen;<br />
vorausgesetzt alle anderen Fehlerquellen (Multipath, Bahnen, Atmosphäre) lassen sich genügend gut<br />
modellieren bzw. durch Differenzbildung eliminieren.<br />
Eine Schwierigkeit bei der Mehrdeutigkeitslösung entsteht dadurch, dass Trägerphasen- und Einfachdifferenzbeobachtungen<br />
immer unbekannte konstante Anteile auf Grund der unvollkommenen<br />
Satelliten- und Empfängeruhren enthalten (s. Abschnitt 2.7.2, Gl.(2.18)). Diese Terme sind von den<br />
unbekannten Zyklusvielfachen nicht zu trennen und zerstören die ganzzahlige Natur der Mehrdeutigkeitsbestimmung.<br />
Man behilft sich, indem versucht wird mit Doppeldifferenzen die Mehrdeutigkeitsparameter<br />
gemeinsam mit den geodätischen Parametern zu bestimmen. [Seeber, 1989]<br />
25