Kinematisches GPS zur Deformationsbestimmung - Beuth ...
Kinematisches GPS zur Deformationsbestimmung - Beuth ...
Kinematisches GPS zur Deformationsbestimmung - Beuth ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
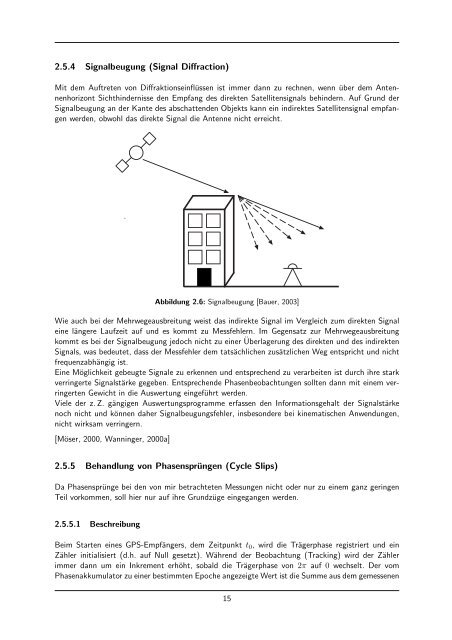
2.5.4 Signalbeugung (Signal Diffraction)<br />
Mit dem Auftreten von Diffraktionseinflüssen ist immer dann zu rechnen, wenn über dem Antennenhorizont<br />
Sichthindernisse den Empfang des direkten Satellitensignals behindern. Auf Grund der<br />
Signalbeugung an der Kante des abschattenden Objekts kann ein indirektes Satellitensignal empfangen<br />
werden, obwohl das direkte Signal die Antenne nicht erreicht.<br />
Abbildung 2.6: Signalbeugung [Bauer, 2003]<br />
Wie auch bei der Mehrwegeausbreitung weist das indirekte Signal im Vergleich zum direkten Signal<br />
eine längere Laufzeit auf und es kommt zu Messfehlern. Im Gegensatz <strong>zur</strong> Mehrwegeausbreitung<br />
kommt es bei der Signalbeugung jedoch nicht zu einer Überlagerung des direkten und des indirekten<br />
Signals, was bedeutet, dass der Messfehler dem tatsächlichen zusätzlichen Weg entspricht und nicht<br />
frequenzabhängig ist.<br />
Eine Möglichkeit gebeugte Signale zu erkennen und entsprechend zu verarbeiten ist durch ihre stark<br />
verringerte Signalstärke gegeben. Entsprechende Phasenbeobachtungen sollten dann mit einem verringerten<br />
Gewicht in die Auswertung eingeführt werden.<br />
Viele der z.Z. gängigen Auswertungsprogramme erfassen den Informationsgehalt der Signalstärke<br />
noch nicht und können daher Signalbeugungsfehler, insbesondere bei kinematischen Anwendungen,<br />
nicht wirksam verringern.<br />
[Möser, 2000, Wanninger, 2000a]<br />
2.5.5 Behandlung von Phasensprüngen (Cycle Slips)<br />
Da Phasensprünge bei den von mir betrachteten Messungen nicht oder nur zu einem ganz geringen<br />
Teil vorkommen, soll hier nur auf ihre Grundzüge eingegangen werden.<br />
2.5.5.1 Beschreibung<br />
Beim Starten eines <strong>GPS</strong>-Empfängers, dem Zeitpunkt t 0 , wird die Trägerphase registriert und ein<br />
Zähler initialisiert (d.h. auf Null gesetzt). Während der Beobachtung (Tracking) wird der Zähler<br />
immer dann um ein Inkrement erhöht, sobald die Trägerphase von 2π auf 0 wechselt. Der vom<br />
Phasenakkumulator zu einer bestimmten Epoche angezeigte Wert ist die Summe aus dem gemessenen<br />
15