Skript (Unvollständig); PDF
Skript (Unvollständig); PDF
Skript (Unvollständig); PDF

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
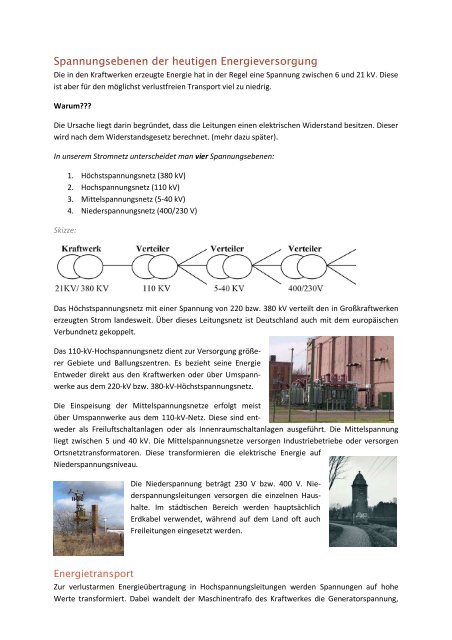
Spannungsebenen der heutigen Energieversorgung<br />
Die in den Kraftwerken erzeugte Energie hat in der Regel eine Spannung zwischen 6 und 21 kV. Diese<br />
ist aber für den möglichst verlustfreien Transport viel zu niedrig.<br />
Warum???<br />
Die Ursache liegt darin begründet, dass die Leitungen einen elektrischen Widerstand besitzen. Dieser<br />
wird nach dem Widerstandsgesetz berechnet. (mehr dazu später).<br />
In unserem Stromnetz unterscheidet man vier Spannungsebenen:<br />
Skizze:<br />
1. Höchstspannungsnetz (380 kV)<br />
2. Hochspannungsnetz (110 kV)<br />
3. Mittelspannungsnetz (5‐40 kV)<br />
4. Niederspannungsnetz (400/230 V)<br />
Das Höchstspannungsnetz mit einer Spannung von 220 bzw. 380 kV verteilt den in Großkraftwerken<br />
erzeugten Strom landesweit. Über dieses Leitungsnetz ist Deutschland auch mit dem europäischen<br />
Verbundnetz gekoppelt.<br />
Das 110‐kV‐Hochspannungsnetz dient zur Versorgung größe‐<br />
rer Gebiete und Ballungszentren. Es bezieht seine Energie<br />
Entweder direkt aus den Kraftwerken oder über Umspann‐<br />
werke aus dem 220‐kV bzw. 380‐kV‐Höchstspannungsnetz.<br />
Die Einspeisung der Mittelspannungsnetze erfolgt meist<br />
über Umspannwerke aus dem 110‐kV‐Netz. Diese sind ent‐<br />
weder als Freiluftschaltanlagen oder als Innenraumschaltanlagen ausgeführt. Die Mittelspannung<br />
liegt zwischen 5 und 40 kV. Die Mittelspannungsnetze versorgen Industriebetriebe oder versorgen<br />
Ortsnetztransformatoren. Diese transformieren die elektrische Energie auf<br />
Niederspannungsniveau.<br />
Die Niederspannung beträgt 230 V bzw. 400 V. Nie‐<br />
derspannungsleitungen versorgen die einzelnen Haus‐<br />
halte. Im städtischen Bereich werden hauptsächlich<br />
Erdkabel verwendet, während auf dem Land oft auch<br />
Freileitungen eingesetzt werden.<br />
Energietransport<br />
Zur verlustarmen Energieübertragung in Hochspannungsleitungen werden Spannungen auf hohe<br />
Werte transformiert. Dabei wandelt der Maschinentrafo des Kraftwerkes die Generatorspannung,
ei großen Kraftwerken etwa 10 kV bis 30 kV, auf die Hochspannung von etwa 110 kV bis 400 kV um,<br />
wodurch im Verbundnetz die Transportverluste geringer ausfallen und größere Leistungen übertra‐<br />
gen werden können. Die Transformationsverluste sind bei Hochspannungstrafos vergleichsweise<br />
gering und liegen meist 0,1% der übertragenen Leistung. Der geringere Strom auf der Hochspan‐<br />
nungsseite bei konstanter übertragener Leistung führt dazu, dass weniger Verlustwärme am Ohm‐<br />
schen Widerstand der Leitung entsteht. Allerdings ist der Strom auf Hochspannungsleitungen im<br />
Normalbetriebsfall relativ hoch und betragsmäßig sogar höher als bei niedrigeren Spannungsebenen<br />
wie dem Mittelspannungsnetz. Der Strom auf 400 kV‐Leitungen liegt im Bereich von 1 kA pro Außen‐<br />
leiter im normalen Betriebsbereich.<br />
Der Grund für den Betrieb von Hochspannungsleitungen ist nicht die Reduktion des Stromes in den<br />
Transportleitungen sondern die durch die Hochspannung erzielbare Steigerung der zu übertragenen<br />
Gesamtleistung.<br />
Bei richtiger Übertragungsspannung heben sich induktive und kapazitive Blindleistung auf (Wellen‐<br />
widerstand Z = 240...300 Ω. Diese Aussage gilt jedoch nur beim Übertragen der so genannten natürli‐<br />
chen Leistung Pn. Für das Mittelspannungsnetz werden die Hochspannungen in Umspannwerken<br />
wieder auf 10 kV bis 36 kV zurücktransformiert.<br />
Fazit<br />
Warum müssen Spannungen zum Transport höher transformiert werden? Ursache ist darin begrün‐<br />
det, dass auch die Leitungen einen elektrischen Widerstand haben. Dieser wird nach dem Wider‐<br />
standsgesetz berechnet: � � ���<br />
� .<br />
Beispiele:<br />
Kabel mit � � 0,18 ����<br />
, � � 200 ��, � � 600 ���<br />
�<br />
daraus folgt: �� ���<br />
� � �,�� �������� ��� �<br />
����� ��� �60 Ω<br />
Ein Kraftwerk speist 500 MW ins Netz ein. Ein Teil der Leistung wird durch den elektrischen Wider‐<br />
stand in Wärme umgewandelt.<br />
Aus � ���� und � ���� erhält man � � ���� �<br />
Daraus ergibt sich eine Verlustleistung von 34 MW oder 7% der eingespeisten Leistung gehen verlo‐<br />
ren.<br />
Aus der Gleichung ist ersichtlich, welche Möglichkeiten es gibt, die Verlustleistung zu reduzieren.<br />
Entweder muss der elektrische Widerstand oder die Stromstärke verringert werden. Eine Verkleine‐<br />
rung des elektrischen Widerstandes der Leitungen kann nur durch Einsatz anderer Materialien mit<br />
geringerem spezifischen Widerstand oder durch Erhöhung des Leiterquerschnittes erreicht werden.<br />
Aus wirtschaftlichen Gründen sind diese Maßnahmen jedoch nicht sinnvoll. Deshalb muss die Strom‐<br />
stärke verringert werden. Dies wird durch Transformatoren erreicht. Die Spannung wird vielfaches<br />
des ursprünglichen Wertes transformiert, die Stromstärke dementsprechend reduziert. In unserem<br />
Beispiel würde bei einer Verzehnfachung der Spannung eine Reduktion auf ein Zehntel des Stromes<br />
führen. Die Verlustleistung verringert sich sogar auf ein Hundertstel, sprich 0,34 MW.<br />
Es gilt folgende Faustformel: Die elektrische Energie kann wirtschaftlich sinnvoll so viele Kilometer<br />
transportiert werden, wie ihre Nennspannung in kV beträgt. Es kann also ein Strom mit einer Nenn‐<br />
spannung von 380kV ohne Zwischenstation 380 km transportiert werden!
Transformator<br />
Symbolische Darstellung, Aufbau eines Trafos<br />
Links: Jeder Trafo besteht grundsätzlich aus zwei magnetisch gekoppelten Magnetkreisen<br />
Rechts: idealer Trafo mit Blind‐und Wirkwiderständen<br />
Die rechte Darstellung wird zur reinen Ersatzschaltung, wenn man die Wirkung aller Feldanteile<br />
durch Induktivitäten bzw. Blindwiderstände darstellt (X1 und X2).<br />
Gemäß der allgemeinen Definition � �� � Λ ergibt sich:<br />
� �� �� � � �Λ�� und � �� �� � � �Λ�� Λ = Leitwert<br />
Auf dem gemeinsamen Hauptweg mit dem Leitwert Λh ergeben sich eine Haupt‐ und eine Gegenin‐<br />
duktivität.<br />
� �� �� � � ��� � �� �� � � ���<br />
Ersatzschaltbild des Trafos<br />
Xh berücksichtigt den Magnetisierungsstrom im Leerlauf.<br />
RFe berücksichtigt die Hysterese‐ und Wirbelstromverluste.<br />
R1 und R2‘ repräsentieren die Stromwärmeverluste.<br />
Lσ1,2 Streuinduktivitäten<br />
Ein realer Transformator hat Übertragungsverluste durch den Ohmschen Widerstand der Wicklung,<br />
durch Wirbelstrombildung im Kern und Ummagnetisierungsverluste. Bei größeren Transformatoren<br />
muss die Verlustleistung ggf. durch geeignete Kühlung abgeführt werden.<br />
Hystereseverluste und Wirbelstromverluste sind im Eisen begründet und werden deshalb als Eisen‐<br />
verluste bezeichnet. Die Stromwärmeverluste sind den Kupferverlusten zuzuordnen, und die Streu‐<br />
verluste ergeben sich aus den Streuflüssen. Die gestrichenen Größen im Ersatzschaltbild müssen ent‐<br />
sprechend dem Übersetzungsverhältnis des Trafos umgerechnet werden.<br />
�<br />
���� �� �� �<br />
� ��<br />
� �<br />
�<br />
� ��� ��� �� � �<br />
�<br />
�<br />
�� � �� ��� �� �� � ���� ��� ��<br />
�� �� �<br />
�� ��� ���� � �<br />
�<br />
�<br />
��
Betriebszustände<br />
Leerlauf bzw. „Unbelasteter Transformator“<br />
Wenn bei angelegter elektrischer Spannung an der Primärspule kein Strom aus der Sekundärspule<br />
des Transformators entnommen wird, wird dies als „Leerlauf“ oder „unbelasteter Betrieb“ bezeich‐<br />
net. In diesem Zustand verhalten sich die eingegebene Primärspannung und die an der Sekundärspu‐<br />
le messbare Sekundärspannung näherungsweise wie die Windungszahlen, weil die sekundären Kup‐<br />
ferverluste gleich Null sind:<br />
�� �� � � �<br />
� �<br />
Dabei sind U1 und U2 die Primär‐und Sekundärspannung sowie N1 und N2 die Primär‐und Sekundär‐<br />
windungszahl.<br />
Ansonsten verhält sich der Transformator im Leerlauf exakt wie eine Induktivität, es ist dabei belang‐<br />
los, ob eine Sekundärspule vorhanden ist oder wie sie ausgeführt ist.<br />
Leerlauf und Magnetisierung<br />
Der Effektivwert der induzierten Spannung kann über �� � �<br />
√� ��Φ� � �4,44 ��Φ�� berechnet<br />
werden. Im Leerlauf ist Uq=U2 und Uq1=U1 ,so dass sich die Klemmenspannung wie bereits oben<br />
gezeigt genau wie die Windungszahlen verhalten.<br />
Leerlaufersatzschaltbild<br />
Leerlauf = Laststrom = 0<br />
d.h. kein Spannungsabfall an Lσ2 und R2‘<br />
deshalb kann im Ersatzschaltbild auf Lσ2 und R2‘<br />
verzichten werden.<br />
Somit ergibt sich folgendes für den Leerlauf gültiges Ersatzschaltbild:<br />
Kurzschlußersatzschaltbild<br />
Der Transformator wird sekundär kurzgeschlos‐<br />
sen und die anliegende Primärspannung soweit<br />
abgesenkt bis Nennstrom fließt.<br />
U2‘=0 � Ui=0<br />
I0<br />
Gegeben: U1N; I0 ; P0<br />
Relative Kurzschlussspannung [ �� � �� � 100% ]<br />
�� mit � � � � ��� �<br />
� �<br />
� 100% � � � � �� � �<br />
� �<br />
� �� ���� ��� �� � ��� ��� �� � ��� � �<br />
�<br />
�<br />
� ��� ���<br />
�<br />
� 100%<br />
��� � ��� �<br />
��
Ersatzschaltbild:<br />
U1K<br />
I1N<br />
RK<br />
XK<br />
� �� ��� ���� �� � ��� ��� � � �� � � � � �<br />
� � � �� � � ��� �<br />
�� � �� �� ��<br />
Belasteter Transformator<br />
Ist der Transformator sekundärseitig belastet, so bewirkt der Sekundärstrom im Eisen ein zusätzli‐<br />
ches magnetisches Wechselfeld. Nach dem Gesetz von Lenz muss die durch den Sekundärstrom ver‐<br />
ursachte Magnetfeldänderung derjenigen, die durch den Primärstrom verursacht wird, entgegen<br />
gerichtet sein. Die effektive Magnetfeldänderung ist bei Belastung somit in der Primärspule geringer<br />
als im unbelasteten Fall. Dadurch ist auch Ui kleiner und somit die effektive Spannung im Primärkreis<br />
größer. Als Folge davon wächst der Primärstrom.<br />
Für einen idealen (verlustfreien) Transformator gilt dann: S1 = S2<br />
Da die elektrische Scheinleistung S das Produkt aus Spannung U und Stromstärke I ist: � ����<br />
folgt: � � �� � � � � �� � wenn die Ströme betragsmäßig aufgefasst werden.<br />
Da sich die Spannungen wie die Windungszahlen verhalten, verhalten sich dann die Ströme (genauer<br />
gesagt auch hier: deren Beträge) umgekehrt wie die Windungszahlen:<br />
�� �� � � �<br />
� �<br />
Verhalten bei Nennbetrieb (Kappsches Dreieck)<br />
Aus dem vollständigen Ersatzschaltbild<br />
des Trafos lässt sich für den Leerlauf das<br />
linke Zeigerdiagramm entwerfen.<br />
Bei Belastung des Transformators lässt<br />
sich anhand des vollständigen Ersatz‐<br />
schaltbildes das genaue Verhalten herlei‐<br />
ten. Bei ohmsch‐induktiver Last auf der<br />
Sekundärseite ergibt sich das rechte Zei‐<br />
gerdiagramm:<br />
Aus dem Zeigerdiagramm kann man un‐<br />
mittelbar ablesen:<br />
� �� ��� ��� ��� � �� und mit �� � �<br />
�<br />
� wird:<br />
�<br />
� �� � �� �� � �� �� �
Folglich:<br />
Der Magnetisierungsstrom ist unabhängig von der Last und in etwa proportional der Klemmenspan‐<br />
nung. Eine Änderung des Sekundärstromes wirkt also unmittelbar auf den Primärstrom zurück!<br />
In der folgenden Betrachtung vernachlässigen wir zur Vereinfachung den Magnetisierungsstrom. Es<br />
gilt dann: � � ��� � � �� . Die vereinfachte Ersatzschaltung (im nachfolgenden)<br />
ergibt sich dann zu:<br />
� � �� � �� �‘<br />
und<br />
� � �� �� � �� ��<br />
Daraus ergibt sich das vereinfachte Zeigerdiagramm mit dem Kappschen<br />
Dreieck (siehe rechte Abbildung)<br />
Im vereinfachten Zeigerdiagramm unterscheiden sich die Spannungen auf der Primär‐und Sekundär‐<br />
seite durch ein Spannungsdreieck, welches “Kappsches Dreieck“ genannt wird.<br />
Bei konstantem Betrag des Stromes ergibt sich die Ortskurve der Sekundär‐<br />
� spannung �� als Kreis um die Primärspannung mit dem Radius/ZK wobei:<br />
�� � ��� �<br />
� ���<br />
Bestimmung der Sekundärspannung mit Hilfe des Kappschen Dreiecks.<br />
Siehe Abbildung rechts.<br />
Bei kapazitiver Last steigt die Sekundärspannung über den Leerlauf‐<br />
wert an!<br />
Trenntrafo<br />
Als Trenntransformator wird im engeren Sinne ein Transformator bezeichnet, der die Netzspannung<br />
von 230 V im Verhältnis 1:1 auf eine Wicklung mit sogenannter "sicherer elektrischer Trennung",<br />
einer verstärkten oder doppelten Isolation zum Netz, transformiert.<br />
Solche Trenntransformatoren werden zu Reparatur‐ und Experimentierzwecken sowie zum Betrieb<br />
von Allstromgeräten eingesetzt, um bei Arbeiten an netzspannungsgespeisten Geräten oder Ausrüs‐<br />
tungen die Gefahr eines Stromschlages zu verringern: Man erzeugt ein nicht mit der Erde verbunde‐<br />
nes, freies Potential der Ausgangsspannung, weshalb bei Berührung kein Strom durch den Körper<br />
gegen Erde abfließen kann.<br />
Trenntransformatoren schützen nicht vor einem Stromschlag, wenn man beide Ausgangspole berührt.<br />
Um den Schutz aufrechtzuerhalten, dürfen Trenntransformatoren keinen Schutzleiter führen. Beim<br />
Anschluss von zwei Geräten am Trenntransformator müssen die Gehäuse der Verbraucher miteinan‐<br />
der auf ein erdfreies gleiches Potenzial geführt werden ("erdfreier örtlicher Potenzialausgleich").
Allgemein ist jeder Transformator mit getrennten Wicklungen ein Trenntransformator ‐jedoch ist die<br />
Isolierung oft nicht ausreichend sicher, um Personenschutz zu gewährleisten.<br />
Auch für Niederfrequenzsignale werden Trenntransformatoren gefertigt, entweder um sichere Netz‐<br />
trennung herzustellen oder Erdschleifen und damit verbundene Brummstörungen zu vermeiden. In<br />
der Nachrichtentechnik nennt man diese Transformatoren Übertrager.<br />
Durch einen Trenntransformator werden herkömmliche Arbeitsleuchten zu Sicherheitsleuchten.<br />
Trenntransformatoren sind "Lebensretter". Ab Trafoausgang besteht galvanische Trennung vom<br />
Stromnetz und somit ‐auch arbeitsrechtlich vorgeschriebene Sicherheit für Berufe mit erhöhter Ge‐<br />
fährdung. In Situationen, in denen ein Kabelbruch tödlich enden kann, z.B. bei Arbeiten innerhalb<br />
eines Metallbehälters, ist ein Trenntrafo unverzichtbar. Optimal ist der Einsatz von Sicherheitsleuch‐<br />
ten. Dort ist der Trenntrafo fest in die Zuleitung integriert und kann deshalb nicht versehentlich ver‐<br />
gessen werden.<br />
Parallelbetrieb von Transformatoren<br />
Es wird unterschieden zwischen dem Netzparallelbetrieb und dem Sammelschienenparallelbetrieb!<br />
Für Ausgleichströme ist es günstiger über lange Netzleitungen zu fließen, anstatt über die kurzen<br />
Sammelschienen.<br />
Ersatzschaltbild:<br />
RKI XKI RKII XKII<br />
Folgende 3‐Bedingungen sind zum Parallelbetrieb zu erfüllen:<br />
1) Gleiches Übersetzungsverhältnis, da sonst Ausgleichströme fließen.<br />
2) Trafos in Parallelbetrieb sollten gleiche Eisenqualität haben,<br />
da sonst unterschiedliche I‘2 � IA<br />
3) Übereinstimmung der relativen (uK) Kurzschlussspannung, da so der Transformator mit dem<br />
kleineren uK den größeren Lastanteil übernehmen muss und er wird überlastet.
Gleichstrommotor<br />
Allgemeine Grundlagen<br />
Bei einem Gleichstrommotor handelt es sich um eine Maschine zur<br />
Umwandlung von elektrischer in mechanische Energie.<br />
Befindet sich ein stromdurchflossener Leiter in einem Magnetfeld, so wirkt auf<br />
ihn eine Kraft. Sie resultiert daraus, dass sich gleiche Magnetpole abstoßen und entgegenge‐<br />
setzte anziehen. In unserem Fall (Bild oben) wird das äußere Erregerfeld von einem Dauer‐<br />
magneten erzeugt. Die Leiterschleife, die drehbar gelagert ist, wird von dem<br />
Strom IA durchflossen und ruft so ebenfalls ein Magnetfeld hervor. Wirken<br />
beide Felder auf einander wird die Leiterschleife veranlasst, sich zu drehen.<br />
Die Pole des Feldmagneten sind durch N = Nordpol und S = Südpol gekenn‐<br />
zeichnet.<br />
Die Leiterschleife, die sich im Luftspalt zwischen den Polen dreht ist durch einen<br />
Balken mit zwei Kreisen dargestellt (Bild a). Die Symbole • und X im Inneren der Kreise zeigen die<br />
Stromrichtung innerhalb der Ankerwicklung. Zu Beginn unserer Darstellung ist die Leiterschleife pa‐<br />
rallel zu den Feldlinien ausgerichtet. Wird nun eine Gleichspannung angelegt, fließt der Strom aus der<br />
untere Spulenhälfte (Punkt in Kreis) heraus und in die oberen Spulenhälfte (X im Kreis) wieder hinein<br />
(Bild b). Da die stromdurchflossene Leiterschleife ein eigenes Magnetfeldentwickelt, kommt es nun<br />
zu einer Überlagerung des Dauermagnetfeldes mit den Feldern der unteren und oberen Spulenhälf‐<br />
ten.<br />
a) b) c) d)<br />
Die Feldlinien des Dauermagneten zeigen stets vom Nordpol zum Südpol, wohingegen die Felder der<br />
Spulenhälften jeweils entgegengesetzte Richtung haben. Wir erkennen die Richtung durch die einge‐<br />
zeichneten Pfeile (Bild b). Dort, wo die Magnetfelder gleichgerichtet sind, verstärken sie sich. Dort,<br />
wo sie entgegengesetzte Richtung haben, werden sie geschwächt. Weil verstärkte, d.h. zusammen‐<br />
gedrängte Feldlinien die Eigenschaft besitzen, sich voneinander abzustoßen, kommt es zu einer<br />
Kraftwirkung in Richtung des verminderten Feldbereichs. Diese ist durch weiße Pfeile gekennzeichnet<br />
( Bild c + d ). Durch diese Kraftwirkung in die jeweils entgegengesetzte Richtung am unteren und am<br />
oberen Ende der Leiterschleife entsteht ein Drehmoment, welches die Rotationsbewegung der Lei‐<br />
terschleife bewirkt.
Aufbau<br />
Im wesentlichen besteht ein Elektromotor aus einem ruhenden Magneten (Ständer) und einer dreh‐<br />
baren Spule (Anker oder Läufer) mit dem Kollektor (Stromwender).<br />
Der Läufer oder Anker befindet sich auf einer Stahlwelle, auf der<br />
ein gepresstes Blechpaket aufgebracht ist um Wirbelströme<br />
zu vermeiden. Die Ankerwicklung, die aus einzelnen Teilspu‐<br />
len besteht, ist in die Nuten des Läufers eingelegt. Anfang und<br />
Ende einer jeden Teilspule sind mit den Lamellen des Strom‐<br />
wenders verbunden. Oft besitzen Läufer einen Lüfter.<br />
Der Ständer ist der feststehende, äußere Teil des Motors, der<br />
unter anderem die Aufgabe hat das Erregerfeld zu erzeugen.<br />
Er besteht aus dem Eisenkern und den Polschenkeln, die die<br />
Ständerwicklung, auch als Erregerwicklung bezeichnet, tragen.<br />
Der Kollektor besteht aus einzelnen, voneinander isolierten Hartkupferlamellen, die über Kohlebürs‐<br />
ten den Stromfluss durch den Läufer herstellen. Die Kohlen werden durch Bürstenhalter auf den<br />
Stromwender gedrückt. Ihr Druck wird mit einer Feder reguliert.<br />
Entstehende Wärme muss vom Motor nach außen abgeführt werden. Je besser die Wärme abgeführt<br />
werden kann, um so kleiner kann der Motor bei gleicher Leistung gebaut werden<br />
Grundprinzip Motor und Generator<br />
Unter einer Gleichstrommaschine versteht man einen Elektromotor, der mit Gleichstrom betrieben<br />
wird. Der Gleichstromgenerator wandelt mechanische Energie in Gleichstrom um.<br />
Die GM besteht aus einem unbeweglichen Teil, dem Stator, und einem beweglichen Teil , dem Rotor.<br />
Die meisten GM sind als Innenläufer ausgeführt: der Rotor ist der innere Teil, der Stator der äußere.<br />
Bei konventionellen GM besteht der Stator aus einem Elektromagneten oder bei kleineren Maschi‐<br />
nen aus einem Permanentmagneten. Der Rotor wird bei konventionellen Maschinen Anker genannt.<br />
Die Wicklung des Ankers wird über den Kommentator angeschlossen. Die Kontakte ( Bürsten ) des<br />
Kommutators sind so aufgebaut, dass sie während der<br />
Drehung ständig die Polung der Ankerwicklung wechseln.<br />
Sie sind aus einem Material gefertigt, welches gut elekt‐<br />
risch leitet, sich im Betrieb leicht abreibt und sich somit<br />
selber „schmiert“ ( meistens enthalten sie Graphit ). Beim<br />
Generator wird durch die Funktion des Kommutators aus<br />
dem Wechselstrom des Rotors Gleichstrom.<br />
Kommutator eines großen Elektromotors<br />
In der Elektrotechnik wird mit Kommutator (von lat. commutare – vertauschen) oder Stromwender<br />
eine Einrichtung zur Stromwendung in elektrischen Maschinen bezeichnet. Die<br />
Stromwendung ist zur Bereitstellung eines relativ zur Wicklung drehenden oder<br />
wandernden Stromes notwendig und für viele elektrische Maschinen essentiell<br />
notwendig. Stromwendeeinrichtungen sind klassisch als Lamellen‐Bürste‐<br />
System ausgeführt (→ Gleichstrommaschine); bei neuzeitlichen Elektronikmo‐<br />
toren werden elektronische Ventile verwendet (Transistoren, Thyristoren,<br />
Triacs), die von einer elektronischen Rotorlageerkennung angesteuert werden
(elektronische Kommutierung). (siehe Buch Elektrische Maschinen S.33)<br />
Kollektor<br />
1: Ankerachse<br />
2: Kollektor<br />
3: Wicklungskontaktierung<br />
4: Wicklungskopf mit Bandage<br />
5: Eisenkern des Ankers mit Wicklungsnuten<br />
Übermäßige Funkenbildung am Kommutator muss vermieden werden, da die dabei entstehende<br />
Hitze zu einem sehr schnellen Verschleiß führen würde. Da man Anfang des 20. Jahrhunderts noch<br />
keine so guten Isolierwerkstoffe hatte wie heute, war man wegen der Funkenbildung an den Kom‐<br />
mutatoren großer Elektromotoren gezwungen, die Frequenz des Bahnstroms auf 16 2 /3 Hz zu senken;<br />
so große Motoren mit 50 Hz (wie aus dem öffentlichen Netz) und Hochspannung zu betreiben, war<br />
damals nicht möglich.
Erzeugung einer Gleichspannung<br />
Rotiert ein Gleichstromanker im Ständerfeld der Luftspalt‐Flussdichte B, so wird in den Leiterstäben<br />
entlang des Umfanges nach Uq = B*l*v eine Spannung induziert. Durch die Reihenschaltung der Spu‐<br />
len addieren sich deren Spannungen Usp zwischen benachbarten Kohlebürsten und bilden in ihrer<br />
Summe die Quellenspannung der Maschine. Der Stromwender sorgt wieder dafür, dass stets der<br />
Maximalwert und damit eine Gleichspannung an den Ankerklemmen auftritt.Der Aufbau einer<br />
Gleichstrommaschine gestattet ohne Änderungen den Motor‐und Generatorbetrieb. Die in der An‐
kerwicklung induzierte Gesamtspannung zwischen den Kohle bürsten hat beim Generator die Funkti‐<br />
on einer Quellenspannung, beim Motor wirkt sie als induzierte Spannung der von außen angelegten<br />
Spannung entgegen.<br />
Polteilung<br />
Gleichstrommaschinen werden in der Regel nicht nur mit zwei Hauptpolen ausgeführt sondern ha‐<br />
ben meistens eine höherpolige Ausführung. Der Bereich eines Poles am Ankerumfang , die Polteilung<br />
τp berechnet sich aus dem Ankerdurchmesser dA und der Polpaarzahl p<br />
Erzeugung eines Drehmoments<br />
Die Grundkonstruktion einer Gleichstrommaschine kann am Beispiel des Motorbetriebs anschaulich<br />
als Anwendung des Kraftwirkungsgesetzes nach F = B*L*I erklären. Man benötigt danach ein Magnet‐<br />
feld der Flussdichte B im Luftspalt der Feldpole und darin drehbar angeordnet Leiter der Länge l, die<br />
einen Strom I führen. Die Stromzufuhr muss dabei so erfolgen, dass stets alle Leiter eines Polbereichs<br />
gleichsinnig durchflossen sind. In dem nachstehenden Bild sind alle wesentlichen Bauteile der Gleich‐<br />
strommaschine enthalten.
Prinzipieller Aufbau einer Gleichstrommaschine
Der feststehende Ständer aus massivem Eisen trägt einen Elektromagneten, dessen Erregung die zum<br />
Aufbau des Feldes erforderliche Durchflutung liefert. Die Enden des Magneten, die Hauptpole, sind<br />
nach innen durch sogenannte Polschuhe erweitert, um gleichzeitig eine möglichst große Leiterzahl zu<br />
erfassen. Den äußeren magnetischen Rückschluss stellt der Jochring sicher.<br />
Rheinische Fachhoch‐<br />
schule Köln Dipl. Ing.<br />
U. Hamm<br />
Grundlagen der elektrischen<br />
Maschinen und Antriebe<br />
4. Semester<br />
Formel Einheit Bezeichnung Bemerkungen<br />
M =I Ψ Nm Drehmoment<br />
U = R I + Ω Ψ V Spannung<br />
Ia = U / R A Anlaufstrom<br />
Ma = Ia Ψ Nm Anlaufmoment<br />
Ω0 = U / Ψ rad/s Leerlaufdrehzahl<br />
P = M Ω W Mechanische Leistung Leistungsbetrachtung<br />
Pe = U I W Elektrische Leistung<br />
Pv = R I ² W Rotorverlustleistung im Rotor (Anker)<br />
Symbol Einheit Bezeichnung Bemerkungen<br />
M Nm Drehmoment<br />
Ω rad/s Drehzahl 1500 U/min sind 157 rad/s<br />
U V Spannung für den Rotor (Anker)<br />
I A Strom für den Rotor (Anker)<br />
R Ω Rotorwiderstand<br />
Ψ Vs Flussverkettung<br />
n Index für Nennwert
Das Nennmoment Mn ist die maximale zulässige Belastung, bei dem die entstehende Verlustwärme<br />
Pvn = R* In² [W] den Antrieb nicht überhitzt. Die Nenndrehzahl Ωn ist die Motordrehzahl, welche sich<br />
bei Nennspannung Un und Nennbelastung Mn einstellt, dann fließt auch der<br />
2‐poliger Gleichstrommotor<br />
Nennstrom In [A]. In diesem Betriebspunkt gibt der Motor seine Nennleistung Pn = Mn* Ωn [W] ab<br />
und nimmt die Nennleistung Pen = Un* In<br />
[W] auf.<br />
4‐poliger Gleichstrommotor
Grundgleichungen der Gleichstrommaschine<br />
Kraft: F = ( Bx I )*l [B]=magn.Flußdichte= 1T =WS/m² Spannung: U = ( B x ν ) *l Induzierte Spannung:<br />
Uq = c * Φ * n c: Maschinenekonstante<br />
[Φ ] = magn.Fluß = Wb = Ws Uq = ‐L* Δl/Δt [ L ] = Induktivität = 1H = Vs/A Maschinenkonstante: c = 4*<br />
p * N p= Polpaare; N= Windungszahl Zeit T für Umdrehung um Polteilung T= 1/n = 1/ 2p Moment: M<br />
=Uq* IA/ 2*π*n<br />
Drehzahl: n = UA‐IA*RA/ c*Φ Verluste: Pv = I²A * RA<br />
Betriebsverhalten der Gleichstrommaschine
Rmf ist der magnetische Widerstand des Feldkreises. Das Betriebsverhalten der Gleichstrommaschi‐<br />
ne hängt davon ab, wie die Erregerwicklung geschaltet ist. Man unterscheidet prinzipiell drei Arten<br />
der Schaltung von Erregerwicklungen ( Wie in den nächsten Kapiteln beschrieben ).<br />
Reihenschlussmaschine<br />
Eine Reihenschlussmaschine wird auch Hauptschlussmaschine genannt. Bei dieser Art von GM Ma‐<br />
schine sind die Erregerwicklung und Ankerwicklung in Reihe geschalten. Dadurch wechseln Erreger‐<br />
feld und Ankerstrom ihre Richtung synchron, so dass eine Speisung mit Wechselstrom möglich ist.<br />
Solche Maschinen wurden als Bahnantriebe in Wechselstromnetzen eingesetzt. Unter dem Begriff<br />
Universalmotor oder Allstrommotor werden die Antriebe von Haushaltsmaschinen, Bohrmaschinen<br />
etc. zusammengefasst.<br />
Schematische Darstellung:<br />
Ersatzschaltbild<br />
Die Drehzahl von Reihenschlussmotoren ist stark lastabhängig. Sinkt das abgegebene Drehmoment,<br />
so steigt wegen des geringeren Stroms und der damit einhergehenden Feldschwächung die Drehzahl<br />
des Ankers. Das kann so weit führen, dass der Motor "durchgeht", was bedeutet, dass sich der Motor<br />
wegen der auftretenden Fliehkräfte selbst zerstört. Deshalb sollten Reihenschlussmotoren mit einer<br />
Grundlast (Motorlüfter, Getriebe etc.) betrieben werden.
Die erste Grundgleichung ergibt:<br />
Die zweite Grundgleichung ergibt:<br />
Somit gilt für die Drehzahl‐Drehmomentkennlinie:<br />
Drehzahl‐ Drehmomentkennlinie
Der Reihenschlußmotor zeigt eine starke Abhängigkeit des Drehmomentes von der Drehzahl: “ wei‐<br />
che Drehzahlkennlinie “. Dadurch ist er besonders geeignet für Traktionszwecke ( Bahnmotoren ). Er<br />
verbindet ein hohes Anzugsmoment ( η= 0 ) mit hoher Drehzahl bei kleinem Drehmoment.<br />
Wichtiger Hinweis: Der Reihenschlußmotor darf nicht völlig mechanisch entlastet werden; wegen des<br />
fehlenden Flusses geht sonst η →∞, d.h. der Motor würde durchdrehen. Die Drehrichtungsumkehr<br />
ist nur durch Umpolung der Feld‐ oder Ankerwicklung möglich. Wegen der Reihenschaltung von<br />
Feld– und Ankerwicklung wirkt das Moment unabhängig von der Stromrichtung immer in die gleiche<br />
Richtung. Deshalb ist der Reihenschlußmotor auch mit Wechselspannung betreibbar. (Eisenteile<br />
müssen zur Verringerung der Wirbelströme geblecht werden.) Der Einsatz als Wechselstrom‐<br />
Bahnmotor oder bei kleiner Leistung ( bis ca. 500W) als Universalmotor, d.h. Betrieb mit Gleich‐ oder<br />
Wechselspannung ( Hausgeräte, Elektrowerkzeuge ) ist üblich. Der Vorteil des Universalmotors: Der<br />
Drehzahlbereich ist nicht nur durch eine Leerlaufdrehzahl beschränkt.<br />
Nebenschlussmaschine<br />
Bei der Nebenschlussmaschine sind Erreger‐ und Ankerwicklung parallel geschaltet. Wechselspan‐<br />
nungsbetrieb ist nicht üblich, da hierfür Erregerund Ankerstrom in Phase sein müssten, d.h. gleiche<br />
Induktivität und Widerstand haben müssen. Oft wird nicht zwischen Nebenschluß‐ und fremderreg‐<br />
ter Maschine unterschieden und dabei übersehen, dass eine Verringerung der Ankerspannung zu<br />
einer Feldschwächung führt.<br />
Schematische Darstellung:
Ersatzschaltbild<br />
Nebenschlußmaschine<br />
Drehzahl‐ Drehmoment Kennlinie Nebenschlussmaschine:<br />
Die Drehzahl n lässt sich durch folgende Maßnahmen einstellen<br />
1. Ankerkreisvorwiderstand Rv verändern Die beiden Nachteile dieser Maßnahme sind:<br />
hohe Verluste<br />
starke Abhängigkeit der Drehzahl vom Ankerstrom<br />
2. Fluß über If einstellen Die Drehzahl n ist proportional 1/Ф, weil bei kleinerem Fluß eine höhere<br />
Drehzahl erforderlich ist, um ein Spannungsgleichgewicht zu erzielen.Flußschwächung bedeutet<br />
Drehzahlerhöhung. ( Übliches Verfahren der Drehzahleinstellung ). Es ist allerdings zu kleinen Dreh‐<br />
zahlen hin beschränkt, da wegen Sättigung nicht ein beliebig großer Fluß realisierbar ist.
Drehzahl‐Drehmomenten‐Kennlinie mit Rv als Parameter<br />
Wirkung des Ankervorwiderstandes:<br />
Der Ankervorwiderstand RV dient als Anlasser zur Begrenzung des Anfahrstromes am Gleichstrom‐<br />
netz konstanter Spannung ( z.B. bei Gleichstrombahnen ). Der Ankerkreisvorwiderstand RV begrenzt<br />
zwar den Ankerstrom IA, verkleinert aber gleichzeitig das Drehmoment Mi = CMASCH/( 2π* Ф* IA ),<br />
d.h. die Drehzahlkennlinie wird “ weicher “. ( Achtung, zusätzliche Verluste )<br />
Fremderregte Gleichstrommaschine<br />
Ersatzschaltbild<br />
Drehzahl‐ Drehmoment Kennlinie der fremderregten GM
Drehzahl‐Drehmomenten‐Kennlinie der fremderregten GM<br />
Das Verhalten der fremderregten Maschine ist wie folgt beschrieben: Die Leerlaufdrehzahl n0 ist<br />
durch UA und Ф steuerbar.<br />
Hieraus lässt sich das das Kennlinienfeld Drehzahl über Drehmoment ermitteln. Parameter ist die<br />
Klemmenspannung UA bezogen auf die Nennspannung UAN, der Fluß Ф ist konstant.<br />
Mit der ersten Grundgleichung folgt:<br />
die Drehzahl n erhält:<br />
daraus erhält man:
Doppelschlußmaschine<br />
Der Doppelschlussmotor vereinigt die Eigenschaften des Neben‐ und Reihenschlussmotors in einer<br />
Maschine. Er hat eine Reihenschluss‐ und eine Nebenschlusswicklung. Je nach Auslegung hat der<br />
Doppelschlu?motor unterschiedliches Betriebsverhalten. Bei richtiger Kompoundierung hat er ein<br />
etwas geringeres Anzugsdrehmoment als ein gleichwertiger Reihenschlussmotor. Bei Leerlauf geht er<br />
nicht durch. Wird der Doppelschlussmotor überkompoundiert, so hat er vorwiegend Reihenschluss‐<br />
verhalten, also ein hohes Anzugsmoment aber eine instabile Drehzahl. Bei Unterkompoundierung hat<br />
er überwiegend Nebenschlussverhalten also hohe Drehzahlstabilität aber geringeren Anzugsmo‐<br />
ment. Der Doppelschlussmotor wird wegen seines gleichen Drehzahl‐ Drehmoment‐Verhaltens zum<br />
Antrieb von Pressen und Stanzen verwendet.<br />
Ersatzschaltbild RA IE<br />
Uq RE IE RE<br />
Drehzahl‐ Drehmomentkennlinie
Gleichstrommaschinen:<br />
a) GS‐Reihenschlußmaschine b) GS‐Reihenschlußmaschine c) GS‐Fremderregter Motor d) GS‐<br />
Doppelschlußmaschine<br />
Einsatz und Anwendungen
Die Drehzahl und das Drehmoment lassen sich bei Gleichstrommotoren sehr einfach steuern. Zusätz‐<br />
lich verfügt sie über eine hohe Rundlaufgüte. Es gibt sehr kleine Motoren mit einer Leistung von un‐<br />
ter einem Watt, die für Feinwerktechnik konstruiert werden. Großmotoren, die mit einer Spannung<br />
von 1500 V betrieben werden nehmen über 10.000 kW Leistung auf. Sehr weit verbreitet sind Moto‐<br />
ren bis ca. 100 W. Viele von ihnen werden durch Dauermagneten betrieben. Oft finden sie in Kraft‐<br />
fahrzeugen Einsatz, wo sie als Scheibenwischer‐, Gebläse‐ und Stellmotoren (Servomotor) verwendet<br />
werden. Ein typisches Einsatzgebiet sind Orte, wo nur Akkumulatoren oder Batterien für eine Strom‐<br />
versorgung möglich sind. Auch in der Industrie kommen Gleichstrommotoren in Werkzeugmaschi‐<br />
nen, Förderanlagen, Robotern und Walzstraßen vor. Ihre Bandbreite geht von Antriebsmotoren für<br />
Nahverkehrsbahnen bis hin zu elektrischen Miniaturmodellen von wenigen Millimetern Größe. Auf‐<br />
grund des hohen Anlaufdrehmoments und der guten Steuerbarkeit der Fahrgeschwindigkeit über die<br />
Betriebsspannung findet dieser Motor vor allem in Straßenbahnen und Lokomotiven Verwendung.<br />
Auch in Hebezeugen und als Autoanlasser usw. wird er gerne eingesetzt.<br />
Bremsen der Gleichstrommaschine<br />
Bei der elektrischen Bremsung des Antiebes wirkt das Drehmoment der Maschine der Bewegungs‐<br />
richtung entgegen. Die den Bremsvorgang einleitende Schalthandlung führt zum generatorischen<br />
Betrieb, in dem die Maschine als Generator auf Widerstände arbeitet ( Widerstandsbremsung ) oder<br />
in das Netz zurückspeist ( Nutzbremsung ) oder zum Gegenstrombetrieb, in dem die Maschine im<br />
gegenläufigen Drehsinn an das Netz geschaltet wird ( Gegenstrombremsung ).<br />
Betriebsarten<br />
Einquadrantenbetrieb<br />
Halbgesteuerte Antriebe<br />
Vollgesteuerte Antriebe<br />
Vierquadrantenbetrieb<br />
weiteres folgt