

KR QUANTEC prime - KUKA Roboter
KR QUANTEC prime - KUKA Roboter
KR QUANTEC prime - KUKA Roboter

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Mounting flange,<br />
adapter (optional)<br />
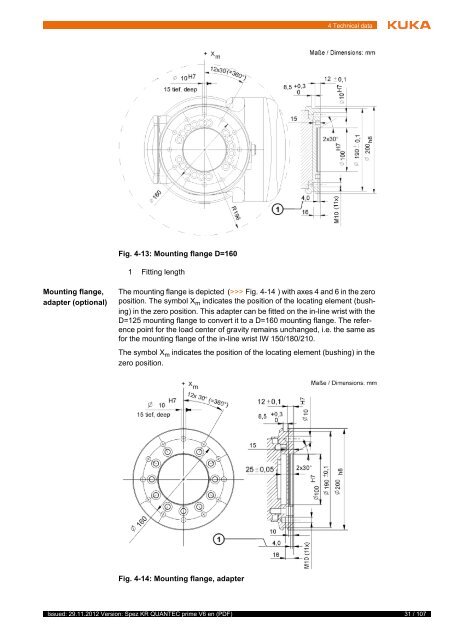
Fig. 4-13: Mounting flange D=160<br />
1 Fitting length<br />
Issued: 29.11.2012 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>prime</strong> V6 en (PDF)<br />
4 Technical data<br />
The mounting flange is depicted (>>> Fig. 4-14 ) with axes 4 and 6 in the zero<br />
position. The symbol Xm indicates the position of the locating element (bushing)<br />
in the zero position. This adapter can be fitted on the in-line wrist with the<br />
D=125 mounting flange to convert it to a D=160 mounting flange. The reference<br />
point for the load center of gravity remains unchanged, i.e. the same as<br />
for the mounting flange of the in-line wrist IW 150/180/210.<br />
The symbol Xm indicates the position of the locating element (bushing) in the<br />
zero position.<br />
Fig. 4-14: Mounting flange, adapter<br />
31 / 107














