

KR QUANTEC prime - KUKA Roboter
KR QUANTEC prime - KUKA Roboter
KR QUANTEC prime - KUKA Roboter

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3 Product description<br />
3.1 Overview of the robot system<br />
Issued: 29.11.2012 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>prime</strong> V6 en (PDF)<br />
3 Product description<br />
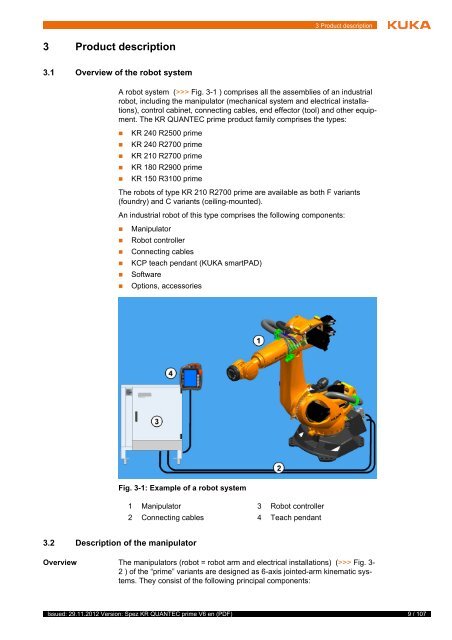
A robot system (>>> Fig. 3-1 ) comprises all the assemblies of an industrial<br />
robot, including the manipulator (mechanical system and electrical installations),<br />
control cabinet, connecting cables, end effector (tool) and other equipment.<br />
The <strong>KR</strong> <strong>QUANTEC</strong> <strong>prime</strong> product family comprises the types:<br />
<strong>KR</strong> 240 R2500 <strong>prime</strong><br />
<strong>KR</strong> 240 R2700 <strong>prime</strong><br />
<strong>KR</strong> 210 R2700 <strong>prime</strong><br />
<strong>KR</strong> 180 R2900 <strong>prime</strong><br />
<strong>KR</strong> 150 R3100 <strong>prime</strong><br />
The robots of type <strong>KR</strong> 210 R2700 <strong>prime</strong> are available as both F variants<br />
(foundry) and C variants (ceiling-mounted).<br />
An industrial robot of this type comprises the following components:<br />
Manipulator<br />
Robot controller<br />
Connecting cables<br />
KCP teach pendant (<strong>KUKA</strong> smartPAD)<br />
Software<br />
Options, accessories<br />
Fig. 3-1: Example of a robot system<br />
3.2 Description of the manipulator<br />
1 Manipulator 3 Robot controller<br />
2 Connecting cables 4 Teach pendant<br />
Overview The manipulators (robot = robot arm and electrical installations) (>>> Fig. 3-<br />
2 ) of the “<strong>prime</strong>” variants are designed as 6-axis jointed-arm kinematic systems.<br />
They consist of the following principal components:<br />
9 / 107














