HS-105P, PE. SA AutoCam™ Pan & Tilt Head - Vinten Radamec
HS-105P, PE. SA AutoCam™ Pan & Tilt Head - Vinten Radamec
HS-105P, PE. SA AutoCam™ Pan & Tilt Head - Vinten Radamec

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>HS</strong>-<strong>105P</strong> Installation<br />
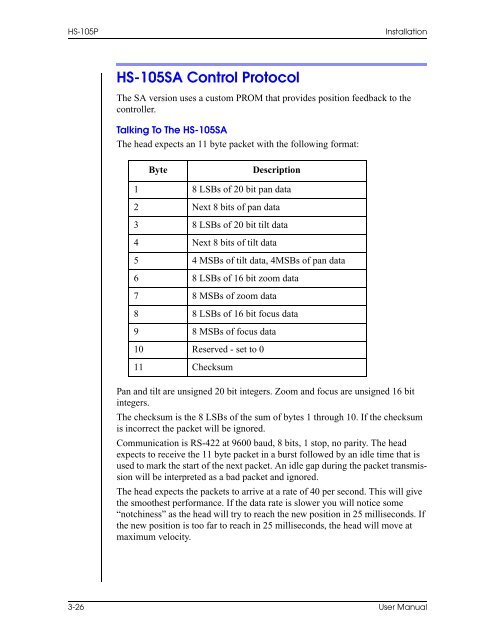
<strong>HS</strong>-105<strong>SA</strong> Control Protocol<br />
The <strong>SA</strong> version uses a custom PROM that provides position feedback to the<br />
controller.<br />
Talking To The <strong>HS</strong>-105<strong>SA</strong><br />
The head expects an 11 byte packet with the following format:<br />
Byte Description<br />
1 8 LSBs of 20 bit pan data<br />
2 Next 8 bits of pan data<br />
3 8 LSBs of 20 bit tilt data<br />
4 Next 8 bits of tilt data<br />
5 4 MSBs of tilt data, 4MSBs of pan data<br />
6 8 LSBs of 16 bit zoom data<br />
7 8 MSBs of zoom data<br />
8 8 LSBs of 16 bit focus data<br />
9 8 MSBs of focus data<br />
10 Reserved - set to 0<br />
11 Checksum<br />
<strong>Pan</strong> and tilt are unsigned 20 bit integers. Zoom and focus are unsigned 16 bit<br />
integers.<br />
The checksum is the 8 LSBs of the sum of bytes 1 through 10. If the checksum<br />
is incorrect the packet will be ignored.<br />
Communication is RS-422 at 9600 baud, 8 bits, 1 stop, no parity. The head<br />
expects to receive the 11 byte packet in a burst followed by an idle time that is<br />
used to mark the start of the next packet. An idle gap during the packet transmission<br />
will be interpreted as a bad packet and ignored.<br />
The head expects the packets to arrive at a rate of 40 per second. This will give<br />
the smoothest performance. If the data rate is slower you will notice some<br />
“notchiness” as the head will try to reach the new position in 25 milliseconds. If<br />
the new position is too far to reach in 25 milliseconds, the head will move at<br />
maximum velocity.<br />
3-26 User Manual