Blind actuator 1-gang flush-mounted Order-No. 2165 00 - Gira
Blind actuator 1-gang flush-mounted Order-No. 2165 00 - Gira
Blind actuator 1-gang flush-mounted Order-No. 2165 00 - Gira

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Software "Venetian blind, input 20BD11"<br />
Functional description<br />
Since a preset slat position is to remain constant until the next change, the device will not<br />
change the height of the Venetian blind, if the calculated movement time required for a change<br />
of position lies within the configured slat moving time.<br />
Similarly, the device accounts for the ratio of the moving times of slat and Venetian blind and –<br />
in case of slat position changes – always recalculates the resulting Venetian blind position. If<br />
the position feedback objects are used (cf. "Position feedback"), the device transmits the<br />
Venetian blind positions changed by the adaptation also to the bus.<br />
Example (Figure 15)...<br />
The Venetian blind position is preset to 50 %. A change of the slat angle (1<strong>00</strong> %...0 %) initiates<br />
the calculation of a new Venetian blind position which is also tracked in the position feedback<br />
objects. If the device is to approach a new Venetian blind position of, for example, 47 % in this<br />
case, the device will not perform a movement as the calculated travelling time lies within the<br />
configured slat moving time and therefore coincides with the slat movement. A change of the<br />
Venetian blind position to 55 % in this case triggers a Venetian blind movement as the change<br />
does not lie within the slat movement (0 to 1<strong>00</strong> %).<br />
In each position operation, the Venetian blind setpoint position refers to a slat position of 1<strong>00</strong> %.<br />
In the event of a slat repositioning movement (0 to 1<strong>00</strong> %), the system will therefore report a<br />
Venetian blind position below the desired position.<br />
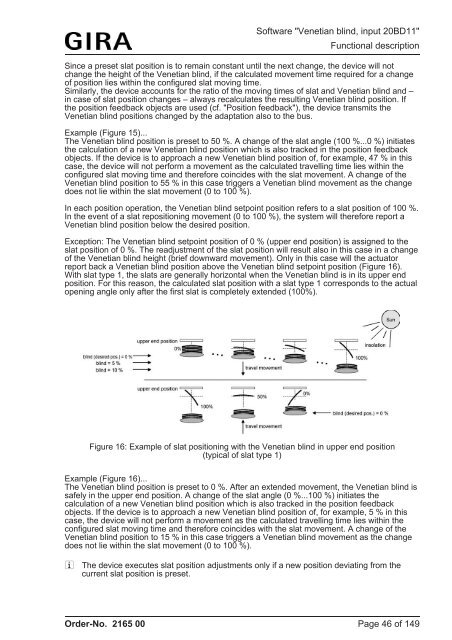
Exception: The Venetian blind setpoint position of 0 % (upper end position) is assigned to the<br />
slat position of 0 %. The readjustment of the slat position will result also in this case in a change<br />
of the Venetian blind height (brief downward movement). Only in this case will the <strong>actuator</strong><br />
report back a Venetian blind position above the Venetian blind setpoint position (Figure 16).<br />
With slat type 1, the slats are generally horizontal when the Venetian blind is in its upper end<br />
position. For this reason, the calculated slat position with a slat type 1 corresponds to the actual<br />
opening angle only after the first slat is completely extended (1<strong>00</strong>%).<br />
Figure 16: Example of slat positioning with the Venetian blind in upper end position<br />
(typical of slat type 1)<br />
Example (Figure 16)...<br />
The Venetian blind position is preset to 0 %. After an extended movement, the Venetian blind is<br />
safely in the upper end position. A change of the slat angle (0 %...1<strong>00</strong> %) initiates the<br />
calculation of a new Venetian blind position which is also tracked in the position feedback<br />
objects. If the device is to approach a new Venetian blind position of, for example, 5 % in this<br />
case, the device will not perform a movement as the calculated travelling time lies within the<br />
configured slat moving time and therefore coincides with the slat movement. A change of the<br />
Venetian blind position to 15 % in this case triggers a Venetian blind movement as the change<br />
does not lie within the slat movement (0 to 1<strong>00</strong> %).<br />
i The device executes slat position adjustments only if a new position deviating from the<br />
current slat position is preset.<br />
<strong>Order</strong>-<strong>No</strong>. <strong>2165</strong> <strong>00</strong><br />
Page 46 of 149