Linking Specialisation and Stability of Plant ... - OPUS Würzburg
Linking Specialisation and Stability of Plant ... - OPUS Würzburg
Linking Specialisation and Stability of Plant ... - OPUS Würzburg

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
28 plant-pollinator dynamics: stability reconsidered<br />
A<br />
0.001 γ ik = 0.99<br />
B<br />
0.001 γ ik = 0.7<br />
0.000<br />
0.000<br />
−0.001<br />
−0.001<br />
−0.002<br />
−0.002<br />
Community <strong>Stability</strong><br />
−0.003<br />
−0.003<br />
0.0 0.2 0.4 0.6 0.8 1.0 0.0 0.2 0.4 0.6 0.8 1.0<br />
C<br />
D<br />
0.001 γ ik = 0.5<br />
0.001 γ ik = 0.2<br />
0.000<br />
0.000<br />
−0.001<br />
−0.002<br />
−0.003<br />
−0.001<br />
−0.002<br />
−0.003<br />
Pollen carryover:<br />
B = 1<br />
B = 2<br />
B = 4<br />
B = 8<br />
B = 16<br />
B = 100<br />
0.0 0.2 0.4 0.6 0.8 1.0<br />
Pollinator Specialization<br />
0.0 0.2 0.4 0.6 0.8 1.0<br />
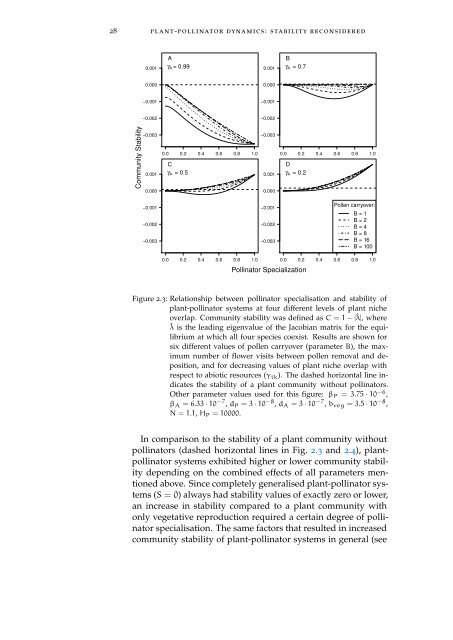
Figure 2.3: Relationship between pollinator specialisation <strong>and</strong> stability <strong>of</strong><br />
plant-pollinator systems at four different levels <strong>of</strong> plant niche<br />
overlap. Community stability was defined as C = 1 − |ˆλ|, where<br />
ˆλ is the leading eigenvalue <strong>of</strong> the Jacobian matrix for the equilibrium<br />
at which all four species coexist. Results are shown for<br />
six different values <strong>of</strong> pollen carryover (parameter B), the maximum<br />
number <strong>of</strong> flower visits between pollen removal <strong>and</strong> deposition,<br />
<strong>and</strong> for decreasing values <strong>of</strong> plant niche overlap with<br />
respect to abiotic resources (γ ik ). The dashed horizontal line indicates<br />
the stability <strong>of</strong> a plant community without pollinators.<br />
Other parameter values used for this figure: β P = 3.75 · 10 −6 ,<br />
β A = 6.33 · 10 −7 , d P = 3 · 10 −8 , d A = 3 · 10 −7 , b veg = 3.5 · 10 −8 ,<br />
N = 1.1, H P = 10000.<br />
In comparison to the stability <strong>of</strong> a plant community without<br />
pollinators (dashed horizontal lines in Fig. 2.3 <strong>and</strong> 2.4), plantpollinator<br />
systems exhibited higher or lower community stability<br />
depending on the combined effects <strong>of</strong> all parameters mentioned<br />
above. Since completely generalised plant-pollinator systems<br />
(S = 0) always had stability values <strong>of</strong> exactly zero or lower,<br />
an increase in stability compared to a plant community with<br />
only vegetative reproduction required a certain degree <strong>of</strong> pollinator<br />
specialisation. The same factors that resulted in increased<br />
community stability <strong>of</strong> plant-pollinator systems in general (see