BLADE BALANCER
BLADE BALANCER
BLADE BALANCER

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
BASIC CONCEPT OF ADJUSTMENT / <br />
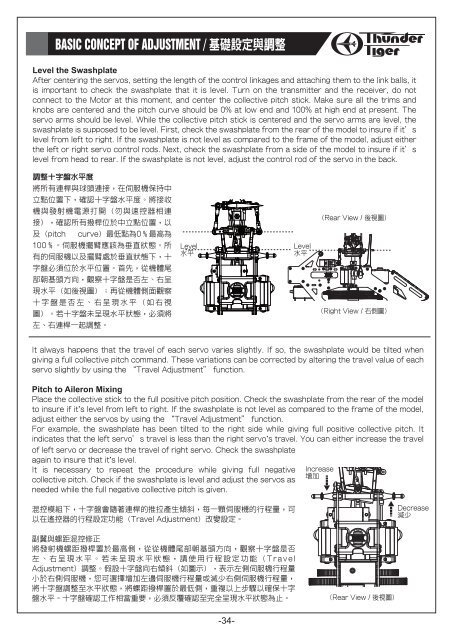
Level the Swashplate<br />
After centering the servos, setting the length of the control linkages and attaching them to the link balls, it<br />
is important to check the swashplate that it is level. Turn on the transmitter and the receiver, do not<br />
connect to the Motor at this moment, and center the collective pitch stick. Make sure all the trims and<br />
knobs are centered and the pitch curve should be 0% at low end and 100% at high end at present. The<br />
servo arms should be level. While the collective pitch stick is centered and the servo arms are level, the<br />
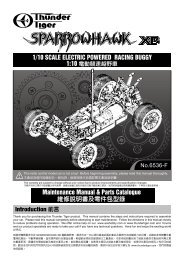
swashplate is supposed to be level. First, check the swashplate from the rear of the model to insure if it’s<br />
level from left to right. If the swashplate is not level as compared to the frame of the model, adjust either<br />
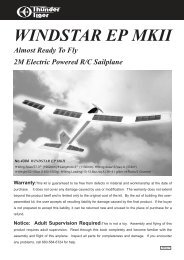
the left or right servo control rods. Next, check the swashplate from a side of the model to insure if it’s<br />
level from head to rear. If the swashplate is not level, adjust the control rod of the servo in the back.<br />
調 整 十 字 盤 水 平 度<br />
將 所 有 連 桿 與 球 頭 連 接 , 在 伺 服 機 保 持 中<br />
立 點 位 置 下 , 確 認 十 字 盤 水 平 度 。 將 接 收<br />
機 與 發 射 機 電 源 打 開 ( 勿 與 速 控 器 相 連<br />
接 ), 確 認 所 有 撥 桿 位 於 中 立 點 位 置 , 以<br />
及 (pitch curve) 最 低 點 為 0% 最 高 為<br />
100%。 伺 服 機 擺 臂 應 該 為 垂 直 狀 態 。 所<br />
有 的 伺 服 機 以 及 擺 臂 處 於 垂 直 狀 態 下 , 十<br />
字 盤 必 須 位 於 水 平 位 置 。 首 先 , 從 機 體 尾<br />
部 朝 基 頭 方 向 , 觀 察 十 字 盤 是 否 左 、 右 呈<br />
現 水 平 ( 如 後 視 圖 ); 再 從 機 體 側 面 觀 察<br />
十 字 盤 是 否 左 、 右 呈 現 水 平 ( 如 右 視<br />
圖 )。 若 十 字 盤 未 呈 現 水 平 狀 態 , 必 須 將<br />
左 、 右 連 桿 一 起 調 整 。<br />
Level<br />
水 平<br />
Level<br />
水 平<br />
(Rear View / 後 視 圖 )<br />
(Right View / 右 側 圖 )<br />
It always happens that the travel of each servo varies slightly. If so, the swashplate would be tilted when<br />
giving a full collective pitch command. These variations can be corrected by altering the travel value of each<br />
servo slightly by using the “Travel Adjustment” function.<br />
Pitch to Aileron Mixing<br />
Place the collective stick to the full positive pitch position. Check the swashplate from the rear of the model<br />
to insure if it’s level from left to right. If the swashplate is not level as compared to the frame of the model,<br />
adjust either the servos by using the “Travel Adjustment” function.<br />
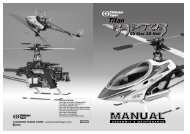
For example, the swashplate has been tilted to the right side while giving full positive collective pitch. It<br />
indicates that the left servo’s travel is less than the right servo’s travel. You can either increase the travel<br />
of left servo or decrease the travel of right servo. Check the swashplate<br />
again to insure that it’s level.<br />
It is necessary to repeat the procedure while giving full negative<br />
collective pitch. Check if the swashplate is level and adjust the servos as<br />
needed while the full negative collective pitch is given.<br />
Increase<br />
增 加<br />
混 控 模 組 下 , 十 字 盤 會 隨 著 連 桿 的 推 拉 產 生 傾 斜 , 每 一 顆 伺 服 機 的 行 程 量 , 可<br />
以 在 遙 控 器 的 行 程 設 定 功 能 (Travel Adjustment) 改 變 設 定 。<br />
Decrease<br />
減 少<br />
副 翼 與 螺 距 混 控 修 正<br />
將 發 射 機 螺 距 撥 桿 置 於 最 高 側 , 從 從 機 體 尾 部 朝 基 頭 方 向 , 觀 察 十 字 盤 是 否<br />
左 、 右 呈 現 水 平 。 若 未 呈 現 水 平 狀 態 , 請 使 用 行 程 設 定 功 能 ( T r a v e l<br />
Adjustment) 調 整 。 假 設 十 字 盤 向 右 傾 斜 ( 如 圖 示 ), 表 示 左 側 伺 服 機 行 程 量<br />
小 於 右 側 伺 服 機 , 您 可 選 擇 增 加 左 邊 伺 服 機 行 程 量 或 減 少 右 側 伺 服 機 行 程 量 ,<br />
將 十 字 盤 調 整 至 水 平 狀 態 , 將 螺 距 撥 桿 置 於 最 低 側 , 重 複 以 上 步 驟 以 確 保 十 字<br />
盤 水 平 。 十 字 盤 確 認 工 作 相 當 重 要 , 必 須 反 覆 確 認 至 完 全 呈 現 水 平 狀 態 為 止 。<br />
(Rear View / 後 視 圖 )<br />
-34-