

Model No.PB - Sanyo Denki America, Inc.
Model No.PB - Sanyo Denki America, Inc.
Model No.PB - Sanyo Denki America, Inc.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
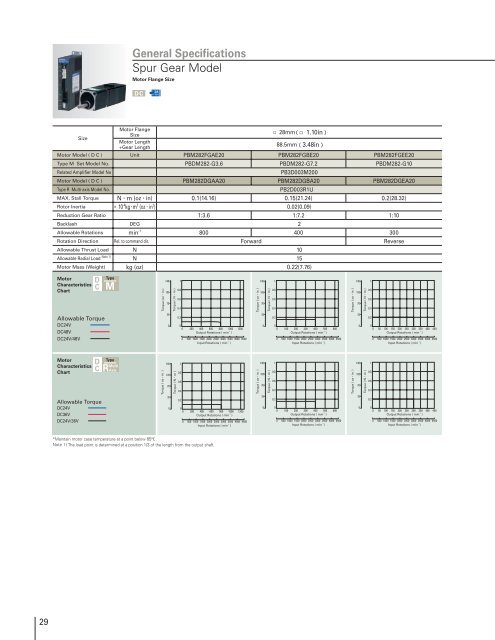
General Specifications<br />
Spur Gear <strong>Model</strong><br />
Motor Flange Size<br />
DC<br />
28<br />
(1.10in)<br />
Size<br />
Motor Flange<br />
Size<br />
Motor Length<br />
+Gear Length<br />
28mm 1.10in<br />
88.5mm3.48in<br />
Motor <strong>Model</strong> ( D C ) Unit <strong>PB</strong>M282FGAE20 <strong>PB</strong>M282FGBE20 <strong>PB</strong>M282FGEE20<br />
Type M Set <strong>Model</strong> <strong>No</strong>. <strong>PB</strong>DM282-G3.6 <strong>PB</strong>DM282-G7.2 <strong>PB</strong>DM282-G10<br />
Related Amplifier <strong>Model</strong> <strong>No</strong><br />
<strong>PB</strong>3D003M200<br />
Motor <strong>Model</strong> ( D C ) <strong>PB</strong>M282DGAA20 <strong>PB</strong>M282DGBA20 <strong>PB</strong>M282DGEA20<br />
Type R Multi-axis <strong>Model</strong> <strong>No</strong>.<br />
<strong>PB</strong>2D003R1U<br />
MAX. Stall Torque Nm (ozin) 0.1(14.16) 0.15(21.24) 0.2(28.32)<br />
Rotor Inertia 10 -4 kgm 2 (ozin 2 ) 0.02(0.09)<br />
Reduction Gear Ratio 1:3.6 1:7.2 1:10<br />
Backlash DEG 2<br />
Allowable Rotations min -1 800 400 300<br />
Rotation Direction Rel. to command dir. Forward Reverse<br />
Allowable Thrust Load N 10<br />
Allowable Radial Load <strong>No</strong>te 1) N 15<br />
Motor Mass (Weight) kg (oz) 0.22(7.76)<br />
Motor<br />
Characteristics<br />
Chart<br />
D<br />
C<br />
Type<br />
M<br />
Torque (ozin )<br />
140<br />
105<br />
70<br />
Torque ( Nm )<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
Torque ( ozin )<br />
140<br />
105<br />
70<br />
Torque ( Nm )<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
Torque ( ozin )<br />
140<br />
105<br />
70<br />
Torque ( Nm )<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
Allowable Torque<br />
DC24V<br />
DC48V<br />
DC24V/48V<br />
35<br />
0<br />
0.2<br />
0<br />
0<br />
200 400 600 800 1000 1200<br />
Output Rotations ( min -1 )<br />
0 500 1000 1500 2000 2500 3000 3500 4000 4500<br />
Input Rotations ( min -1 )<br />
35<br />
0<br />
0.2<br />
0<br />
0<br />
100 200 300 400 500 600<br />
Output Rotations ( min -1 )<br />
0 500 1000 1500 2000 2500 3000 3500 4000 4500<br />
Input Rotations ( min -1 )<br />
35<br />
0<br />
0.2<br />
0<br />
0<br />
50<br />
100 150 200 250 300 350 400 450<br />
Output Rotations ( min -1 )<br />
0 500 1000 1500 2000 2500 3000 3500 4000 4500<br />
Input Rotations ( min -1 )<br />
Motor<br />
Characteristics<br />
Chart<br />
Allowable Torque<br />
DC24V<br />
DC36V<br />
DC24V/36V<br />
Type<br />
D 140 1<br />
C R<br />
Multi<br />
Axis<br />
0.8<br />
0.6<br />
70<br />
0.4<br />
35<br />
0.2<br />
Torque ( ozin )<br />
105<br />
0<br />
Torque ( Nm )<br />
0<br />
0<br />
200 400 600 800 1000 1200<br />
Output Rotations ( min -1 )<br />
0 500 1000 1500 2000 2500 3000 3500 4000 4500<br />
Input Rotations ( min -1 )<br />
Torque ( ozin )<br />
140<br />
105<br />
70<br />
35<br />
0<br />
Torque ( Nm )<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
0<br />
100 200 300 400 500 600<br />
Output Rotations ( min -1 )<br />
0 500 1000 1500 2000 2500 3000 3500 4000 4500<br />
Input Rotations ( min -1 )<br />
Torque ( ozin )<br />
140<br />
105<br />
70<br />
35<br />
0<br />
Torque ( Nm )<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
0<br />
50<br />
100 150 200 250 300 350 400 450<br />
Output Rotations ( min -1 )<br />
0 500 1000 1500 2000 2500 3000 3500 4000 4500<br />
Input Rotations ( min -1 )<br />
*Maintain motor case temperature at a point below 85 .<br />
<strong>No</strong>te 1) The load point is determined at a position 1/3 of the length from the output shaft.<br />
29













