

Model No.PB - Sanyo Denki America, Inc.
Model No.PB - Sanyo Denki America, Inc.
Model No.PB - Sanyo Denki America, Inc.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Extensive Closed-Loop Stepping System Lineup<br />
CLOSED LOOP STEPPING SYSTEMS <strong>Model</strong> <strong>No</strong>.<strong>PB</strong><br />
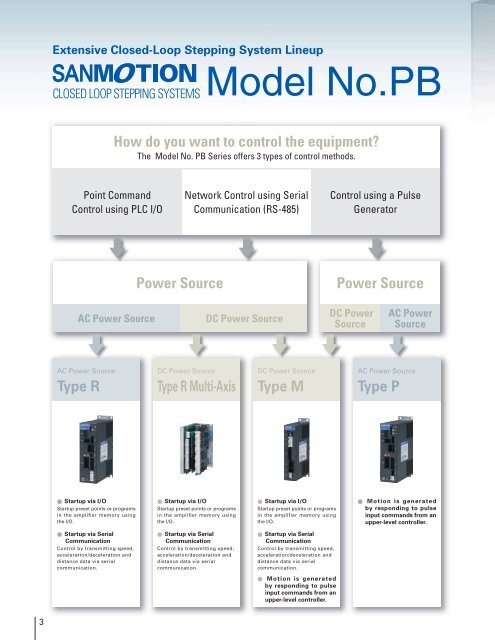
How do you want to control the equipment?<br />
The <strong>Model</strong> <strong>No</strong>. <strong>PB</strong> Series offers 3 types of control methods.<br />
Point Command<br />
Control using PLC I/O<br />
Network Control using Serial<br />
Communication (RS-485)<br />
Control using a Pulse<br />
Generator<br />
Power Source<br />
Power Source<br />
AC Power Source DC Power Source<br />
DC Power<br />
Source<br />
AC Power<br />
Source<br />
AC Power Source<br />
Type R<br />
DC Power Source<br />
Type R Multi-Axis<br />
DC Power Source<br />
Type M<br />
AC Power Source<br />
Type P<br />
Startup via I/O<br />
Startup preset points or programs<br />
in the amplifier memory using<br />
the I/O.<br />
Startup via I/O<br />
Startup preset points or programs<br />
in the amplifier memory using<br />
the I/O.<br />
Startup via I/O<br />
Startup preset points or programs<br />
in the amplifier memory using<br />
the I/O.<br />
Motion is generated<br />
by responding to pulse<br />
input commands from an<br />
upper-level controller.<br />
Startup via Serial<br />
Communication<br />
Control by transmitting speed,<br />
acceleration/deceleration and<br />
distance data via serial<br />
communication.<br />
Startup via Serial<br />
Communication<br />
Control by transmitting speed,<br />
acceleration/deceleration and<br />
distance data via serial<br />
communication.<br />
Startup via Serial<br />
Communication<br />
Control by transmitting speed,<br />
acceleration/deceleration and<br />
distance data via serial<br />
communication.<br />
Motion is generated<br />
by responding to pulse<br />
input commands from an<br />
upper-level controller.<br />
3













