

Contents - Student subdomain for University of Bath
Contents - Student subdomain for University of Bath
Contents - Student subdomain for University of Bath

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3.5. EQUATIONS AND INEQUALITIES 109<br />
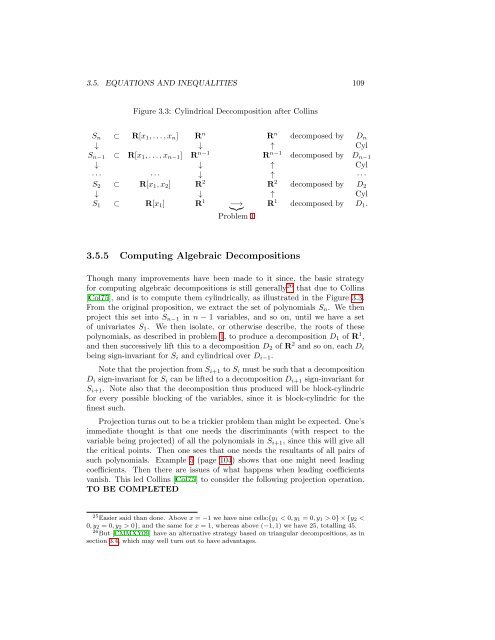
Figure 3.3: Cylindrical Deccomposition after Collins<br />
S n ⊂ R[x 1 , . . . , x n ] R n R n decomposed by D n<br />
↓ ↓ ↑ Cyl<br />
S n−1 ⊂ R[x 1 , . . . , x n−1 ] R n−1 R n−1 decomposed by D n−1<br />
↓ ↓ ↑ Cyl<br />
· · · · · · ↓ ↑ · · ·<br />
S 2 ⊂ R[x 1 , x 2 ] R 2 R 2 decomposed by D 2<br />
↓ ↓ ↑ Cyl<br />
S 1 ⊂ R[x 1 ] R 1 }{{}<br />
−→<br />
Problem 1<br />
R 1 decomposed by D 1 .<br />
3.5.5 Computing Algebraic Decompositions<br />
Though many improvements have been made to it since, the basic strategy<br />
<strong>for</strong> computing algebraic decompositions is still generally 26 that due to Collins<br />
[Col75], and is to compute them cylindrically, as illustrated in the Figure 3.3.<br />
From the original proposition, we extract the set <strong>of</strong> polynomials S n . We then<br />
project this set into S n−1 in n − 1 variables, and so on, until we have a set<br />
<strong>of</strong> univariates S 1 . We then isolate, or otherwise describe, the roots <strong>of</strong> these<br />
polynomials, as described in problem 1, to produce a decomposition D 1 <strong>of</strong> R 1 ,<br />
and then successively lift this to a decomposition D 2 <strong>of</strong> R 2 and so on, each D i<br />
being sign-invariant <strong>for</strong> S i and cylindrical over D i−1 .<br />
Note that the projection from S i+1 to S i must be such that a decomposition<br />
D i sign-invariant <strong>for</strong> S i can be lifted to a decomposition D i+1 sign-invariant <strong>for</strong><br />
S i+1 . Note also that the decomposition thus produced will be block-cylindric<br />
<strong>for</strong> every possible blocking <strong>of</strong> the variables, since it is block-cylindric <strong>for</strong> the<br />
finest such.<br />
Projection turns out to be a trickier problem than might be expected. One’s<br />
immediate thought is that one needs the discriminants (with respect to the<br />
variable being projected) <strong>of</strong> all the polynomials in S i+1 , since this will give all<br />
the critical points. Then one sees that one needs the resultants <strong>of</strong> all pairs <strong>of</strong><br />
such polynomials. Example 5 (page 104) shows that one might need leading<br />
coefficients. Then there are issues <strong>of</strong> what happens when leading coefficients<br />
vanish. This led Collins [Col75] to consider the following projection operation.<br />
TO BE COMPLETED<br />
25 Easier said than done. Above x = −1 we have nine cells:{y 1 < 0, y 1 = 0, y 1 > 0} × {y 2 <<br />
0, y 2 = 0, y 2 > 0}, and the same <strong>for</strong> x = 1, whereas above (−1, 1) we have 25, totalling 45.<br />
26 But [CMMXY09] have an alternative strategy based on triangular decompositions, as in<br />
section 3.4, which may well turn out to have advantages.








![[Luyben] Process Mod.. - Student subdomain for University of Bath](https://img.yumpu.com/26471077/1/171x260/luyben-process-mod-student-subdomain-for-university-of-bath.jpg?quality=85)



