software training courses 2010 corsi di addestramento ... - EnginSoft
software training courses 2010 corsi di addestramento ... - EnginSoft
software training courses 2010 corsi di addestramento ... - EnginSoft

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
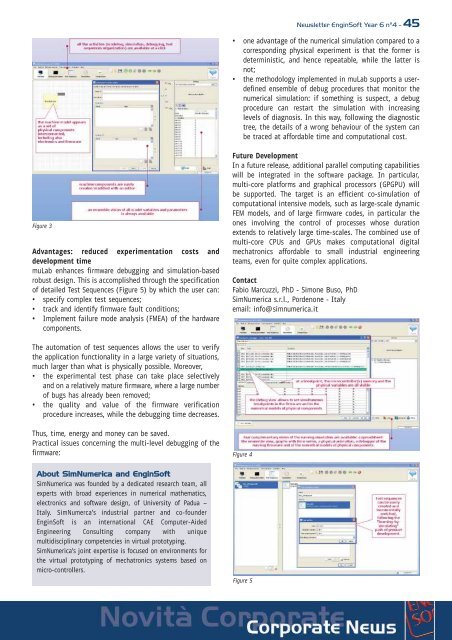
Figure 3<br />
Advantages: reduced experimentation costs and<br />
development time<br />
muLab enhances firmware debugging and simulation-based<br />
robust design. This is accomplished through the specification<br />
of detailed Test Sequences (Figure 5) by which the user can:<br />
specify complex test sequences;<br />
track and identify firmware fault con<strong>di</strong>tions;<br />
Implement failure mode analysis (FMEA) of the hardware<br />
components.<br />
The automation of test sequences allows the user to verify<br />
the application functionality in a large variety of situations,<br />
much larger than what is physically possible. Moreover,<br />
the experimental test phase can take place selectively<br />
and on a relatively mature firmware, where a large number<br />
of bugs has already been removed;<br />
the quality and value of the firmware verification<br />
procedure increases, while the debugging time decreases.<br />
Thus, time, energy and money can be saved.<br />
Practical issues concerning the multi-level debugging of the<br />
firmware:<br />
About SimNumerica and <strong>EnginSoft</strong><br />
SimNumerica was founded by a de<strong>di</strong>cated research team, all<br />
experts with broad experiences in numerical mathematics,<br />
electronics and <strong>software</strong> design, of University of Padua –<br />
Italy. SimNumerca’s industrial partner and co-founder<br />
<strong>EnginSoft</strong> is an international CAE Computer-Aided<br />
Engineering Consulting company with unique<br />
multi<strong>di</strong>sciplinary competencies in virtual prototyping.<br />
SimNumerica’s joint expertise is focused on environments for<br />
the virtual prototyping of mechatronics systems based on<br />
micro-controllers.<br />
Newsletter <strong>EnginSoft</strong> Year 6 n°4 - 45<br />
one advantage of the numerical simulation compared to a<br />
correspon<strong>di</strong>ng physical experiment is that the former is<br />
deterministic, and hence repeatable, while the latter is<br />
not;<br />
the methodology implemented in muLab supports a userdefined<br />
ensemble of debug procedures that monitor the<br />
numerical simulation: if something is suspect, a debug<br />
procedure can restart the simulation with increasing<br />
levels of <strong>di</strong>agnosis. In this way, following the <strong>di</strong>agnostic<br />
tree, the details of a wrong behaviour of the system can<br />
be traced at affordable time and computational cost.<br />
Future Development<br />
In a future release, ad<strong>di</strong>tional parallel computing capabilities<br />
will be integrated in the <strong>software</strong> package. In particular,<br />
multi-core platforms and graphical processors (GPGPU) will<br />
be supported. The target is an efficient co-simulation of<br />
computational intensive models, such as large-scale dynamic<br />
FEM models, and of large firmware codes, in particular the<br />
ones involving the control of processes whose duration<br />
extends to relatively large time-scales. The combined use of<br />
multi-core CPUs and GPUs makes computational <strong>di</strong>gital<br />
mechatronics affordable to small industrial engineering<br />
teams, even for quite complex applications.<br />
Contact<br />
Fabio Marcuzzi, PhD - Simone Buso, PhD<br />
SimNumerica s.r.l., Pordenone - Italy<br />
email: info@simnumerica.it<br />
Figure 4<br />
Figure 5