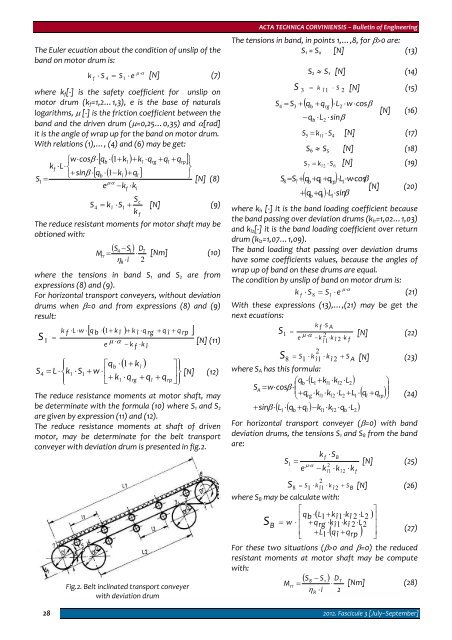
The Euler ecuation about the condition of unslip of theband on motor drum is:28μ ⋅αk f ⋅ S 4 = S 1 ⋅ e [N] (7)where k f [‐] is the safety coefficient for unslip onmotor drum (k f =1,2…1,3), e is the base of naturalslogarithms, μ [‐] is the friction coefficient between theband and the driven drum (μ=0,25…0,35) and α[rad]it is the angle of wrap up for the band on motor drum.With relations (1),…, (4) and (6) may be get:⋅[ qb⋅( 1+kî) + kî⋅qrg+ qî+ qrp][ q ⋅( 1−k) + q ]⎧w⋅cosβ⎫kf⋅L⋅⎨⎬sin b î îS⎩+β ⋅⎭1 = [N] (8)μ⋅αe −k⋅kSS +fic4 = k î ⋅S1[N] (9)k fThe reduce resistant moments for motor shaft may beobtioned with:( S −S)4 1 DTMrr= ⋅ [Nm] (10)η ⋅i2Rwhere the tensions in band S 1 and S 2 are fromexpressions (8) and (9).For horizontal transport conveyers, without deviationdrums when β=0 and from expressions (8) and (9)result:k f ⋅L⋅w⋅[ q b ⋅( 1+k î ) + k î ⋅q rg + q î + q rp ]S1 =[N] (11)eμ ⋅α− k f ⋅k î( 1+k )⎪⎧⎡qb⋅ î ⎤⎪⎫S4 = L ⋅⎨kî ⋅S1+ w ⋅ ⎢⎥⎬[N] (12)⎪⎩ ⎣+ kî⋅qrg+ qî+ qrp⎦⎪⎭The reduce resistance moments at motor shaft, maybe determinate with the formula (10) where S 1 and S 2are given by expression (11) and (12).The reduce resistance moments at shaft of drivenmotor, may be determinate for the belt transportconveyer with deviation drum is presented in fig.2.Fig.2. Belt inclinated transport conveyerwith deviation drumACTA TECHNICA CORVINIENSIS – Bulletin of EngineeringThe tensions in band, in points 1,…,8, for β>0 are:S 1 = S x [N] (13)SS 2 ≈ S 1 [N] (14)3 k î 1 ⋅ S 2= [N] (15)( q + q )S4= S3+ b rg ⋅L2⋅w⋅cosβ[N] (16)−q⋅L⋅sinβS = S +87b2S = î ⋅ [N] (17)5 k 1 S4S 6 ≈ S 5 [N] (18)S = î ⋅ [N] (19)7 k 2 S6( q + q + q )+b( q + q ) ⋅L⋅sinβbîîrp1⋅L1⋅wcos⋅ β[N] (20)where k î1 [‐] it is the band loading coefficient becausethe band passing over deviation drums (k î1 =1,02…1,03)and k î2 [‐] it is the band loading coefficient over returndrum (k î2 =1,07…1,09).The band loading that passing over deviation drumshave some coefficients values, because the angles ofwrap up of band on these drums are equal.The condition by unslip of band on motor drum is:μ ⋅αk f ⋅ S 8 = S 1 ⋅e(21)With these expressions (13),…,(21) may be get thenext ecuations:Sk f ⋅S A1 =e⋅α−k2⋅k î ⋅k î 1 2 fμ [N] (22)S = 28 S1⋅ k î 1 ⋅ k î 2 + S A [N] (23)where S A has this formula:⎛qb⋅( L1+ kî1⋅kî2 ⋅L2) ⎞SA= w⋅cosβ⋅⎜⎟qrgkî1kî2 L2L1( qîqrp)⎝+ ⋅ ⋅ ⋅ + ⋅ +⎠ (24)+ sinβ⋅ L ⋅ q + q −k⋅k⋅q⋅L( ( ))1bîî1For horizontal transport conveyer (β=0) with banddeviation drums, the tensions S 1 and S 8 from the bandare:k f ⋅SBS1 = [N] (25)μ ⋅α2e − k ⋅k⋅kî1î2bî 2S = 2S1⋅ k î 1 ⋅ k î 2 + S B8 [N] (26)where S B may be calculate with:S B⎡⎤⎢q b ⋅( L1+ k î 1⋅k î 2 ⋅L2)= w ⋅ ⎢ + q rg ⋅k î 1⋅k î 2 ⋅L2⎢(27)⎣+ L1⋅2( ) ⎥ ⎥⎥ q î + q rp ⎦For these two situations (β>0 and β=0) the reducedresistant moments at motor shaft may be computewith:( S8− S1) DTMrr= ⋅ [Nm] (28)η ⋅i2Rf2012. Fascicule 3 [July–September]
ACTA TECHNICA CORVINIENSIS – Bulletin of EngineeringIn the relations (10) and (28) i is the transmition ratioof reduction devices:Ωmi = (29)ΩTwhere Ω m [s ‐1 ] and Ω T [s ‐1 ] are the angular speeds of themotor and the driven drum.THE NECESSARY POWER CALCULATION FOR DRIVING THE BELTTRANSPORT CONVEYERSThe necessary power for driving the belt transportconveyer may be calculate with:− 3P = M ⋅ Ω ⋅ 10 ;PPTTT==MMrrrrrr⋅ i ⋅m⋅ i ⋅ ΩvRbTT⋅ 10⋅ 10− 3− 3; [kW] (30)where v b [m/s] is the band speed and R T [m] is the rayof driven drum.May be choise a motor which has the nominal speed n n[rot/min]:30⋅Ω nmn ≥ (31)πand the power:Pn ≥ P T(32)In continuation it is checking if the starting motormoment M p [Nm] is bigger than the reduced resistantmoment M rr [Nm] at shaft of driven motor. For this,from the motor catalog, it is determining the variationof the motor moment in function with the slip s[‐].The motor moment is giving by simplification ecuationof Kloss:⋅MkM = 2 s s(33)k+skswhere: M k [Nm] is the critical motor moment, s k [‐] ‐the slip at the critical moment and s[‐] is the motorslip. These size are calculating with:M = λ ⋅ M ;ssskkk= sMMkknPn= λ ⋅Ωn30 ⋅P= λ ⋅nkπ ⋅nn2n ⋅( λ + λ − 1 );n0− n=n0nΩ 0 − Ω n=Ω0n0− ns = ;n⋅;2( λ + λ − 1 );2⋅( λ + λ − 1 )0Ω 0 − Ωs =Ω0(34)(35)(36)n0− nnsn= ;n0(37)Ω 0 − Ω nsn=Ω 0In this relations:λ[‐] is the motor overload coefficient gave it in themotor catalog,P n [W] is the motor nominal power,n 0 [rot/min] and Ω 0 [s ‐1 ] are the syncronic speed,respective the angular speed proper at this speed,n n [rot/min] and Ω n [s ‐1 ] are the nominal speed,respective the angular speed,n [rot/min] and Ω [s ‐1 ] are the momentan speed,respective the angular speed ands k [‐], s n [‐] and s[‐] are the slip proper for the criticalmoment M k , nominal moment M n and currentmoment M.The motor starting moment M p [Nm] are calculatingwith sympliphicate formula of Kloss for s=1:Mp⋅M⋅s= 2 (38)1+k k2skThe motor may win the dynamic moment M d [Nm] if:M p >M rr (39)If this condition is not carries out, may be choise amotor with bigger power.CONCLUSIONSThis paper introduces on the base of investigationdone it on spatiality literature [1‐7], a quick calculationof necessary power for drive with triphasic cageinduction motors the inclined or horizontal belttransport conveyer, with and without deviationdrums.For inclined or horizontal belt transport conveyerwithout deviation drums, the necessary power ofdriven motor are calculating with (30), (8), (9), (11),(12) and (10), and for inclined or horizontal transportconveyer with deviation drums, the necessary powerof driven motor are calculating with (30), (28), (24),(22), (23) or (27), (26), (25) and (28) with carry out ofinequality (39), for these two constructive types.In this work may be establish the algorithm and thecomputing program of power driven motor for belttransport conveyer with small and medium capacity.REFERENCES[1.] N.V. Boțan ‐ The Base of Computing Electrical Drives(in Romanian), <strong>Technica</strong>l House, Bucharest, Romania,1970 (Bazele calculului acționărilor electrice, EdituraTehnică, Bucureşti, România, 1970).[2.] Al. Fransua, C. Saal, and I. Țopa ‐ Electrical Drives (inRomanian), Didactical and Pedagogical House,Bucharest, Romania, 1975 (Acționări electrice, EdituraDidactică şi Pedagogică, Bucureşti, România, 1975).2012. Fascicule 3 [July–September] 29
- Page 2 and 3: ACTA TECHNICA CORVINIENSIS- BULLETI
- Page 4 and 5: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 6 and 7: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 8 and 9: Regional Editors from MALAYSIAAbdel
- Page 10 and 11: Imre TIMÁRUniversity of Pannonia,
- Page 12 and 13: Ioan MILOŞANTransilvania Universit
- Page 14 and 15: Member from GREECENicolaos VAXEVANI
- Page 16 and 17: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 18 and 19: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 20 and 21: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 22 and 23: two decades are seismically deficie
- Page 24 and 25: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 26 and 27: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 30 and 31: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 32 and 33: examination centre of the Hungarian
- Page 34 and 35: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 36 and 37: elieve that they are communicating
- Page 38 and 39: converting the data also increases
- Page 40 and 41: REFERENCES[1.] Bhavyesh Divecha, Aj
- Page 42 and 43: In addition, API (Application Progr
- Page 44 and 45: The new protocol has to be implemen
- Page 46 and 47: compressor, the now hot and highly
- Page 48 and 49: Figure 7. Pressure ratio of evapora
- Page 50 and 51: Physical data model (MFD) is obtain
- Page 52 and 53: The new project which now includes
- Page 54 and 55: Figure 3. Materials evolutionThe pr
- Page 56 and 57: (GPa) and weight used in the textil
- Page 58 and 59: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 60 and 61: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 62 and 63: A machine vision‐guided plant sen
- Page 64 and 65: During the experiment, non‐unifor
- Page 66 and 67: espectively velocities hodograph (v
- Page 68 and 69: generation and thermal‐diffusion
- Page 70 and 71: 70(Pr−1)=bGm( R −cPr)( − M+c
- Page 72 and 73: 72Figure 12: Sherwood Number for di
- Page 74 and 75: ACTA TECHNICA CORVINIENSIS - Bullet
- Page 76 and 77: The hardware components offer the p
- Page 78 and 79:
Markers 1 (t=‐60 ms) and 2 (t=‐
- Page 80 and 81:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 82 and 83:
compensation, apply dynamic control
- Page 84 and 85:
A. Impact on transmission line prot
- Page 86 and 87:
[12.] W.H. Zhang, S.J. Lee, M.S. Ch
- Page 88 and 89:
Substituting equations (2), (3), (4
- Page 90 and 91:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 92 and 93:
the tribological experiment to simu
- Page 94 and 95:
It is difficult to determine temper
- Page 96 and 97:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 98 and 99:
where: “ν ” represents the con
- Page 100 and 101:
Figure 10. The velocity field in a
- Page 102 and 103:
made on demand. In this type of pro
- Page 104 and 105:
traditional MANET routing protocol
- Page 106 and 107:
and classification,” In Journal o
- Page 108 and 109:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 110 and 111:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 112 and 113:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 114 and 115:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 116 and 117:
equipped with tube made from stainl
- Page 118 and 119:
Fig. 10 ‐ The die, the blank hold
- Page 120 and 121:
desktop, it must be based on runtim
- Page 122 and 123:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 124 and 125:
database, which makes it possible t
- Page 126 and 127:
technology - „Applied logistics
- Page 128 and 129:
increase in one of the factors lead
- Page 130 and 131:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 132 and 133:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 134 and 135:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 136 and 137:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 138 and 139:
ACTA TECHNICA CORVINIENSIS - Bullet
- Page 140 and 141:
ACTA TECHNICA CORVINIENSIS - Bullet