

KR 700 PA, KR 700 PA arctic - KUKA Robotics
KR 700 PA, KR 700 PA arctic - KUKA Robotics
KR 700 PA, KR 700 PA arctic - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
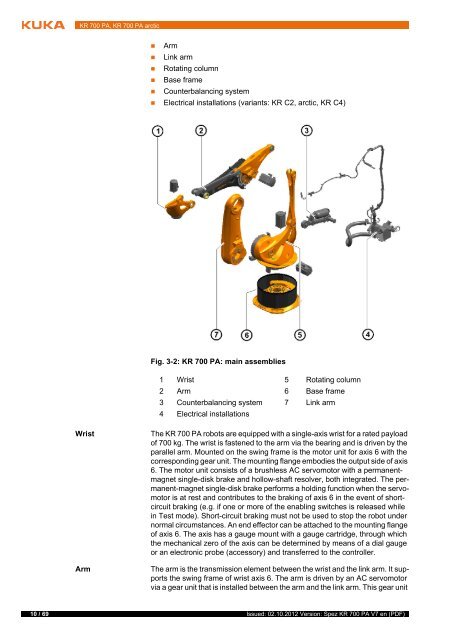
<strong>KR</strong> <strong>700</strong> <strong>PA</strong>, <strong>KR</strong> <strong>700</strong> <strong>PA</strong> <strong>arctic</strong>• Arm• Link arm• Rotating column• Base frame• Counterbalancing system• Electrical installations (variants: <strong>KR</strong> C2, <strong>arctic</strong>, <strong>KR</strong> C4)Fig. 3-2: <strong>KR</strong> <strong>700</strong> <strong>PA</strong>: main assemblies1 Wrist 5 Rotating column2 Arm 6 Base frame3 Counterbalancing system 7 Link arm4 Electrical installationsWristArmThe <strong>KR</strong> <strong>700</strong> <strong>PA</strong> robots are equipped with a single-axis wrist for a rated payloadof <strong>700</strong> kg. The wrist is fastened to the arm via the bearing and is driven by theparallel arm. Mounted on the swing frame is the motor unit for axis 6 with thecorresponding gear unit. The mounting flange embodies the output side of axis6. The motor unit consists of a brushless AC servomotor with a permanentmagnetsingle-disk brake and hollow-shaft resolver, both integrated. The permanent-magnetsingle-disk brake performs a holding function when the servomotoris at rest and contributes to the braking of axis 6 in the event of shortcircuitbraking (e.g. if one or more of the enabling switches is released whilein Test mode). Short-circuit braking must not be used to stop the robot undernormal circumstances. An end effector can be attached to the mounting flangeof axis 6. The axis has a gauge mount with a gauge cartridge, through whichthe mechanical zero of the axis can be determined by means of a dial gaugeor an electronic probe (accessory) and transferred to the controller.The arm is the transmission element between the wrist and the link arm. It supportsthe swing frame of wrist axis 6. The arm is driven by an AC servomotorvia a gear unit that is installed between the arm and the link arm. This gear unit10 / 69 Issued: 02.10.2012 Version: Spez <strong>KR</strong> <strong>700</strong> <strong>PA</strong> V7 en (PDF)













