Tab 36
Tab 36
Tab 36

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
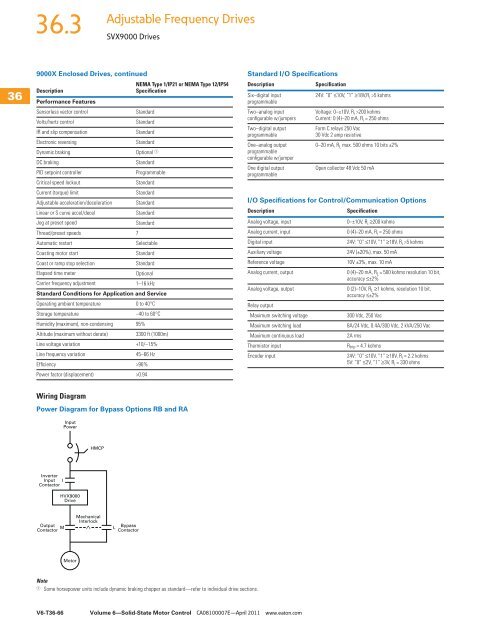
<strong>36</strong>.3Adjustable Frequency DrivesSVX9000 Drives<strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong><strong>36</strong>9000X Enclosed Drives, continuedDescriptionPerformance FeaturesSensorless vector controlStandardVolts/hertz controlStandardIR and slip compensationStandardElectronic reversingStandardDynamic brakingOptional DC brakingStandardPID setpoint controllerProgrammableCritical speed lockoutStandardCurrent (torque) limitStandardAdjustable acceleration/deceleration StandardLinear or S curve accel/decelStandardJog at preset speedStandardThread/preset speeds 7Automatic restartSelectableCoasting motor startStandardCoast or ramp stop selectionStandardElapsed time meterOptionalCarrier frequency adjustment1–16 kHzStandard Conditions for Application and ServiceOperating ambient temperature 0 to 40°CStorage temperature –40 to 60°CHumidity (maximum), non-condensing 95%Altitude (maximum without derate)3300 ft (1000m)Line voltage variation +10/–15%Line frequency variation45–66 HzEfficiency >96%Power factor (displacement) >0.94Wiring DiagramNEMA Type 1/IP21 or NEMA Type 12/IP54SpecificationPower Diagram for Bypass Options RB and RAInverterInputContactor IOutputContactorInputPowerHVX9000DriveMMotorHMCPMechanicalInterlockLBypassContactorNoteSome horsepower units include dynamic braking chopper as standard—refer to individual drive sections.Standard I/O SpecificationsDescriptionSpecificationSix–digital input24V: “0” ≤10V, “1” ≥18V,R i >5 kohmsprogrammableTwo–analog inputconfigurable w/jumpersTwo–digital outputprogrammableOne–analog outputprogrammableconfigurable w/jumperOne digital outputprogrammableVoltage: 0–±10V, R i >200 kohmsCurrent: 0 (4)–20 mA, R i = 250 ohmsForm C relays 250 Vac30 Vdc 2 amp resistive0–20 mA, R L max. 500 ohms 10 bits ±2%Open collector 48 Vdc 50 mAI/O Specifications for Control/Communication OptionsDescriptionSpecificationAnalog voltage, input0–±10V, R i ≥200 kohmsAnalog current, input0 (4)–20 mA, R i = 250 ohmsDigital input24V: “0” ≤10V, “1” ≥18V, R i >5 kohmsAuxiliary voltage24V (±20%), max. 50 mAReference voltage10V ±3%, max. 10 mAAnalog current, output0 (4)–20 mA, R L = 500 kohms resolution 10 bit,accuracy ≤±2%Analog voltage, output0 (2)–10V, R L ≥1 kohms, resolution 10 bit,accuracy ≤±2%Relay outputMaximum switching voltage300 Vdc, 250 VacMaximum switching load8A/24 Vdc, 0.4A/300 Vdc, 2 kVA/250 VacMaximum continuous load2A rmsThermistor inputR trip = 4.7 kohmsEncoder input24V: “0” ≤10V, “1” ≥18V, R i = 2.2 kohms5V: “0” ≤2V, “1” ≥3V, R i = 330 ohmsV6-T<strong>36</strong>-66Volume 6—Solid-State Motor Control CA08100007E—April 2011 www.eaton.com