

Dialogue essais-simulation et identification de lois de comportement ...
Dialogue essais-simulation et identification de lois de comportement ...
Dialogue essais-simulation et identification de lois de comportement ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Partie B – Chapitre 7 : I<strong>de</strong>ntification <strong>de</strong>s paramètres du <strong>comportement</strong> superélastique du NiTi<br />
Sollicitation<br />
(CL, Efforts)<br />
Modèle<br />
(Paramètres)<br />
Réponse<br />
( )<br />
Sollicitation<br />
(CL, Efforts)<br />
Réponse<br />
( )<br />
Paramètres<br />
du Modèle<br />
Problème direct<br />
Problème inverse<br />
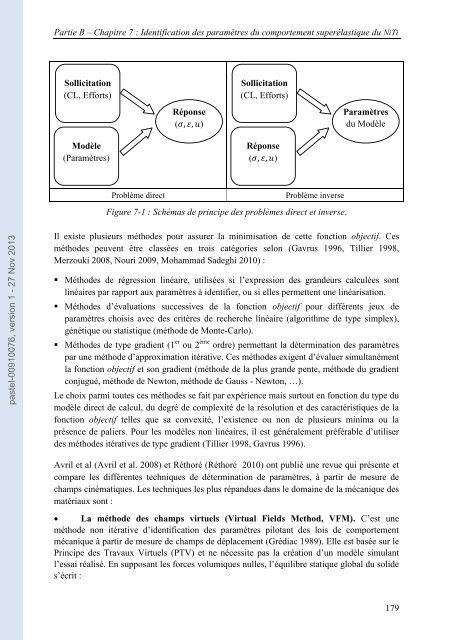
Figure 7-1 : Schémas <strong>de</strong> principe <strong>de</strong>s problèmes direct <strong>et</strong> inverse.<br />
pastel-00910076, version 1 - 27 Nov 2013<br />
Il existe plusieurs métho<strong>de</strong>s pour assurer la minimisation <strong>de</strong> c<strong>et</strong>te fonction objectif. Ces<br />
métho<strong>de</strong>s peuvent être classées en trois catégories selon (Gavrus 1996, Tillier 1998,<br />
Merzouki 2008, Nouri 2009, Mohammad Sa<strong>de</strong>ghi 2010) :<br />
• Métho<strong>de</strong>s <strong>de</strong> régression linéaire, utilisées si l’expression <strong>de</strong>s gran<strong>de</strong>urs calculées sont<br />
linéaires par rapport aux paramètres à i<strong>de</strong>ntifier, ou si elles perm<strong>et</strong>tent une linéarisation.<br />
• Métho<strong>de</strong>s d’évaluations successives <strong>de</strong> la fonction objectif pour différents jeux <strong>de</strong><br />
paramètres choisis avec <strong>de</strong>s critères <strong>de</strong> recherche linéaire (algorithme <strong>de</strong> type simplex),<br />
génétique ou statistique (métho<strong>de</strong> <strong>de</strong> Monte-Carlo).<br />
• Métho<strong>de</strong>s <strong>de</strong> type gradient (1 er ou 2 ème ordre) perm<strong>et</strong>tant la détermination <strong>de</strong>s paramètres<br />
par une métho<strong>de</strong> d’approximation itérative. Ces métho<strong>de</strong>s exigent d’évaluer simultanément<br />
la fonction objectif <strong>et</strong> son gradient (métho<strong>de</strong> <strong>de</strong> la plus gran<strong>de</strong> pente, métho<strong>de</strong> du gradient<br />
conjugué, métho<strong>de</strong> <strong>de</strong> Newton, métho<strong>de</strong> <strong>de</strong> Gauss - Newton, …).<br />
Le choix parmi toutes ces métho<strong>de</strong>s se fait par expérience mais surtout en fonction du type du<br />
modèle direct <strong>de</strong> calcul, du <strong>de</strong>gré <strong>de</strong> complexité <strong>de</strong> la résolution <strong>et</strong> <strong>de</strong>s caractéristiques <strong>de</strong> la<br />
fonction objectif telles que sa convexité, l’existence ou non <strong>de</strong> plusieurs minima ou la<br />
présence <strong>de</strong> paliers. Pour les modèles non linéaires, il est généralement préférable d’utiliser<br />
<strong>de</strong>s métho<strong>de</strong>s itératives <strong>de</strong> type gradient (Tillier 1998, Gavrus 1996).<br />
Avril <strong>et</strong> al (Avril <strong>et</strong> al. 2008) <strong>et</strong> Réthoré (Réthoré 2010) ont publié une revue qui présente <strong>et</strong><br />
compare les différentes techniques <strong>de</strong> détermination <strong>de</strong> paramètres, à partir <strong>de</strong> mesure <strong>de</strong><br />
champs cinématiques. Les techniques les plus répandues dans le domaine <strong>de</strong> la mécanique <strong>de</strong>s<br />
matériaux sont :<br />
La métho<strong>de</strong> <strong>de</strong>s champs virtuels (Virtual Fields M<strong>et</strong>hod, VFM). C’est une<br />
métho<strong>de</strong> non itérative d’<strong>i<strong>de</strong>ntification</strong> <strong>de</strong>s paramètres pilotant <strong>de</strong>s <strong>lois</strong> <strong>de</strong> <strong>comportement</strong><br />
mécanique à partir <strong>de</strong> mesure <strong>de</strong> champs <strong>de</strong> déplacement (Grédiac 1989). Elle est basée sur le<br />
Principe <strong>de</strong>s Travaux Virtuels (PTV) <strong>et</strong> ne nécessite pas la création d’un modèle simulant<br />
l’essai réalisé. En supposant les forces volumiques nulles, l’équilibre statique global du soli<strong>de</strong><br />
s’écrit :<br />
179













