
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Руководство <strong>по</strong> эксплуатации преобразователей <strong>VFD</strong>-M …………..………………………….…… стр. 80<br />
00: Нет синхронизации с вращающимся двигателем<br />
01: Поиск скорости начинается с <strong>по</strong>следнего заданного значения частоты<br />
02: Поиск скорости начинается с минимальной частоты<br />
Эта функция определяет метод синхронизации с вращающимся двигателем <strong>по</strong>сле<br />
отключения привода командой паузы (Base Block) или из-за срабатывания защиты от<br />
сверхтока или перенапряжения на шине <strong>по</strong>стоянного тока и <strong>по</strong>следующего рестарта<br />
привода.<br />
Pr. 114 Режим работы охлаждающего вентилятора Заводская уставка: 02<br />
Возможные значения:<br />
00: Вентилятор выключится через 1 мин <strong>по</strong>сле остановки привода<br />
01: Вентилятор включается <strong>по</strong> команде RUN, а выключается <strong>по</strong> команде STOP<br />
02: Вентилятор работает всегда <strong>по</strong>ка на ПЧ <strong>по</strong>дано напряжение питания<br />
03: Зарезервировано<br />
Параметр определяет режим охлаждения преобразователя встроенным<br />
вентилятором.<br />
Pr.115<br />
~<br />
Pr.135<br />
Параметры ПИД-регулятора<br />
Эти параметры ис<strong>по</strong>льзуются для регулирования различного рода процессов, таких<br />
как <strong>по</strong>ддержание <strong>по</strong>стоянного воздушного <strong>по</strong>тока, расхода, давления или температуры с<br />
<strong>по</strong>мощью <strong>по</strong>дачи сигналов обратной связи с соответствующего датчика.<br />
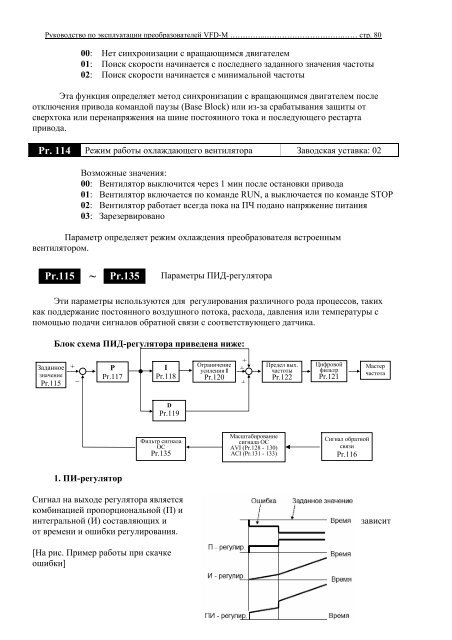
Блок схема ПИД-регулятора приведена ниже:<br />
Заданное<br />
значение<br />
Pr.115<br />
+<br />
−<br />
P<br />
Pr.117<br />
I<br />
Pr.118<br />
Ограничение<br />
усиления I<br />
Pr.120<br />
+<br />
+<br />
+<br />
Предел вых.<br />
частоты<br />
Pr.122<br />
Цифровой<br />
фильтр<br />
Pr.121<br />
Мастер<br />
частота<br />
D<br />
Pr.119<br />
Фильтр сигнала<br />
ОС<br />
Pr.135<br />
Масштабирование<br />
сигнала ОС<br />
AVI (Pr.128 - 130)<br />
ACI (Pr.131 - 133)<br />
Сигнал обратной<br />
связи<br />
Pr.116<br />
1. ПИ-регулятор<br />
Сигнал на выходе регулятора является<br />
комбинацией про<strong>по</strong>рциональной (П) и<br />
интегральной (И) составляющих и<br />
от времени и ошибки регулирования.<br />
зависит<br />
[На рис. Пример работы при скачке<br />
ошибки]