
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Руководство <strong>по</strong> эксплуатации преобразователей <strong>VFD</strong>-M …………..………………………….…… стр. 81<br />
Замечание: сигнал ПИ регулятора <strong>по</strong>лучается как сумма про<strong>по</strong>рциональной и интегральной<br />
составляющих.<br />
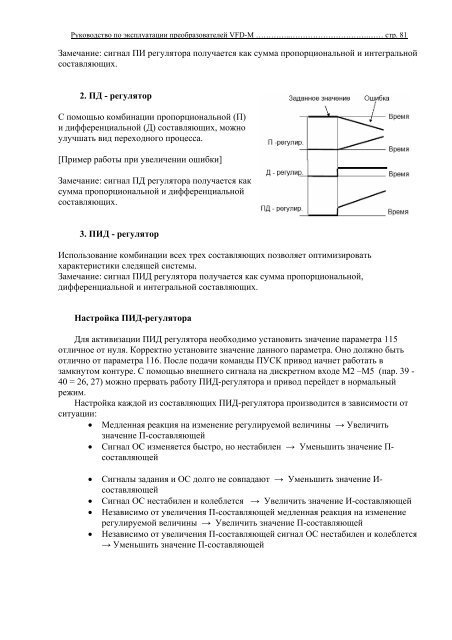
2. ПД - регулятор<br />
С <strong>по</strong>мощью комбинации про<strong>по</strong>рциональной (П)<br />
и дифференциальной (Д) составляющих, можно<br />
улучшать вид переходного процесса.<br />
[Пример работы при увеличении ошибки]<br />
Замечание: сигнал ПД регулятора <strong>по</strong>лучается как<br />
сумма про<strong>по</strong>рциональной и дифференциальной<br />
составляющих.<br />
3. ПИД - регулятор<br />
Ис<strong>по</strong>льзование комбинации всех трех составляющих <strong>по</strong>зволяет оптимизировать<br />
характеристики следящей системы.<br />
Замечание: сигнал ПИД регулятора <strong>по</strong>лучается как сумма про<strong>по</strong>рциональной,<br />
дифференциальной и интегральной составляющих.<br />
Настройка ПИД-регулятора<br />
Для активизации ПИД регулятора необходимо установить значение параметра 115<br />
отличное от нуля. Корректно установите значение данного параметра. Оно должно быть<br />
отлично от параметра 116. После <strong>по</strong>дачи команды ПУСК привод начнет работать в<br />
замкнутом контуре. С <strong>по</strong>мощью внешнего сигнала на дискретном входе М2 –М5 (пар. 39 -<br />
40 = 26, 27) можно прервать работу ПИД-регулятора и привод перейдет в нормальный<br />
режим.<br />
Настройка каждой из составляющих ПИД-регулятора производится в зависимости от<br />
ситуации:<br />
• Медленная реакция на изменение регулируемой величины → Увеличить<br />
значение П-составляющей<br />
• Сигнал ОС изменяется быстро, но нестабилен → Уменьшить значение П-<br />
составляющей<br />
• Сигналы задания и ОС долго не совпадают → Уменьшить значение И-<br />
составляющей<br />
• Сигнал ОС нестабилен и колеблется → Увеличить значение И-составляющей<br />
• Независимо от увеличения П-составляющей медленная реакция на изменение<br />
регулируемой величины → Увеличить значение П-составляющей<br />
• Независимо от увеличения П-составляющей сигнал ОС нестабилен и колеблется<br />
→ Уменьшить значение П-составляющей