

dynamique non-lineaire des systemes multi-rotors. etudes ...
dynamique non-lineaire des systemes multi-rotors. etudes ...
dynamique non-lineaire des systemes multi-rotors. etudes ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
26 CHAPITRE 2.<br />
MODÈLES DE ROULEMENTS<br />
y<br />
y<br />
y<br />
PSfrag replacements<br />
PSfrag replacements<br />
PSfrag replacements<br />
z<br />
(a) 2 ddl<br />
x<br />
z<br />
(b) 4 ddl<br />
x<br />
z<br />
(c) 5 ddl<br />
x<br />
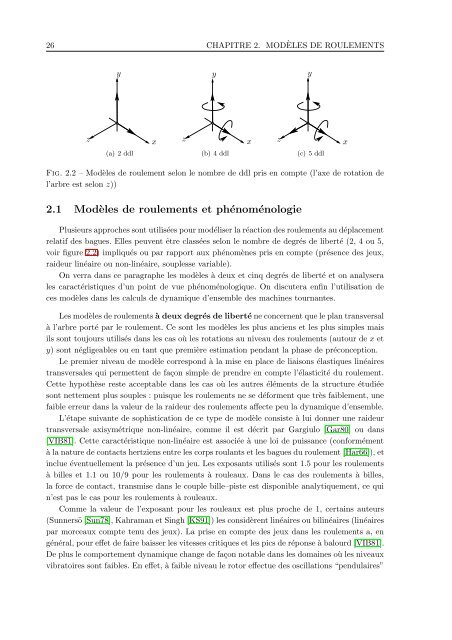
Fig. 2.2 – Modèles de roulement selon le nombre de ddl pris en compte (l’axe de rotation de<br />
l’arbre est selon z))<br />
2.1 Modèles de roulements et phénoménologie<br />
Plusieurs approches sont utilisées pour modéliser la réaction <strong>des</strong> roulements au déplacement<br />
relatif <strong>des</strong> bagues. Elles peuvent être classées selon le nombre de degrés de liberté (2, 4 ou 5,<br />
voir figure 2.2) impliqués ou par rapport aux phénomènes pris en compte (présence <strong>des</strong> jeux,<br />
raideur linéaire ou <strong>non</strong>-linéaire, souplesse variable).<br />
On verra dans ce paragraphe les modèles à deux et cinq degrés de liberté et on analysera<br />
les caractéristiques d’un point de vue phénoménologique. On discutera enfin l’utilisation de<br />
ces modèles dans les calculs de <strong>dynamique</strong> d’ensemble <strong>des</strong> machines tournantes.<br />
Les modèles de roulements à deux degrés de liberté ne concernent que le plan transversal<br />
à l’arbre porté par le roulement. Ce sont les modèles les plus anciens et les plus simples mais<br />
ils sont toujours utilisés dans les cas où les rotations au niveau <strong>des</strong> roulements (autour de x et<br />
y) sont négligeables ou en tant que première estimation pendant la phase de préconception.<br />
Le premier niveau de modèle correspond à la mise en place de liaisons élastiques linéaires<br />
transversales qui permettent de façon simple de prendre en compte l’élasticité du roulement.<br />
Cette hypothèse reste acceptable dans les cas où les autres éléments de la structure étudiée<br />
sont nettement plus souples : puisque les roulements ne se déforment que très faiblement, une<br />
faible erreur dans la valeur de la raideur <strong>des</strong> roulements affecte peu la <strong>dynamique</strong> d’ensemble.<br />
L’étape suivante de sophistication de ce type de modèle consiste à lui donner une raideur<br />
transversale axisymétrique <strong>non</strong>-linéaire, comme il est décrit par Gargiulo [Gar80] ou dans<br />
[VIB81]. Cette caractéristique <strong>non</strong>-linéaire est associée à une loi de puissance (conformément<br />
à la nature de contacts hertziens entre les corps roulants et les bagues du roulement [Har66]), et<br />
inclue éventuellement la présence d’un jeu. Les exposants utilisés sont 1.5 pour les roulements<br />
à billes et 1.1 ou 10/9 pour les roulements à rouleaux. Dans le cas <strong>des</strong> roulements à billes,<br />
la force de contact, transmise dans le couple bille–piste est disponible analytiquement, ce qui<br />
n’est pas le cas pour les roulements à rouleaux.<br />
Comme la valeur de l’exposant pour les rouleaux est plus proche de 1, certains auteurs<br />
(Sunnersö [Sun78], Kahraman et Singh [KS91]) les considèrent linéaires ou bilinéaires (linéaires<br />
par morceaux compte tenu <strong>des</strong> jeux). La prise en compte <strong>des</strong> jeux dans les roulements a, en<br />
général, pour effet de faire baisser les vitesses critiques et les pics de réponse à balourd [VIB81].<br />
De plus le comportement <strong>dynamique</strong> change de façon notable dans les domaines où les niveaux<br />
vibratoires sont faibles. En effet, à faible niveau le rotor effectue <strong>des</strong> oscillations “pendulaires”














