

dynamique non-lineaire des systemes multi-rotors. etudes ...
dynamique non-lineaire des systemes multi-rotors. etudes ...
dynamique non-lineaire des systemes multi-rotors. etudes ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
36 CHAPITRE 2.<br />
MODÈLES DE ROULEMENTS<br />
mt, Nm<br />
70<br />
60<br />
50<br />
40<br />
30<br />
mt, Nm<br />
120<br />
100<br />
80<br />
60<br />
20<br />
40<br />
10<br />
20<br />
0<br />
0<br />
ag replacements<br />
0.01<br />
0.005<br />
θ r<br />
0<br />
0<br />
PSfrag replacements<br />
0.002 0.004 0.006 0.008 0.01 0.012<br />
θ t<br />
0.01<br />
0.005<br />
θ r<br />
0<br />
0<br />
0.002 0.004 0.006 0.008 0.01 0.012<br />
θ t<br />
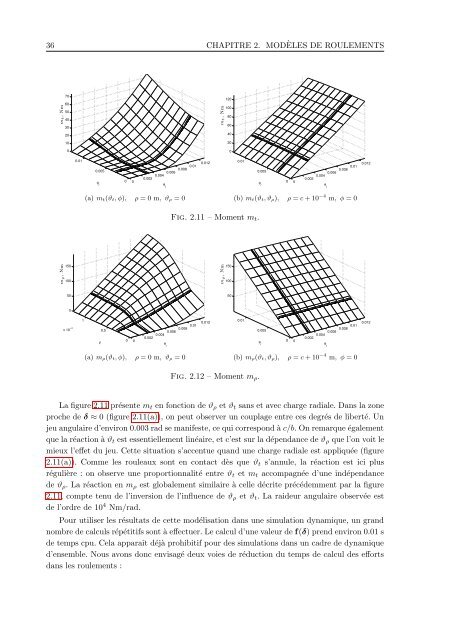
(a) m t(ϑ t, φ), ρ = 0 m, ϑ ρ = 0<br />
(b) m t(ϑ t, ϑ ρ), ρ = c + 10 −4 m, φ = 0<br />
Fig. 2.11 – Moment m t .<br />
mρ, Nm<br />
150<br />
100<br />
mρ, Nm<br />
150<br />
100<br />
50<br />
50<br />
0<br />
ag replacements<br />
x 10 −4<br />
1<br />
ρ<br />
0.5<br />
0<br />
0<br />
PSfrag replacements<br />
0.002 0.004 0.006 0.008 0.01 0.012<br />
θ r<br />
0.01<br />
0.005<br />
θ r<br />
0<br />
0<br />
0.002 0.004 0.006 0.008 0.01 0.012<br />
θ t<br />
(a) m ρ(ϑ t, φ), ρ = 0 m, ϑ ρ = 0<br />
(b) m ρ(ϑ t, ϑ ρ), ρ = c + 10 −4 m, φ = 0<br />
Fig. 2.12 – Moment m ρ .<br />
La figure 2.11 présente m t en fonction de ϑ ρ et ϑ t sans et avec charge radiale. Dans la zone<br />
proche de δ ≈ 0 (figure 2.11(a)), on peut observer un couplage entre ces degrés de liberté. Un<br />
jeu angulaire d’environ 0.003 rad se manifeste, ce qui correspond à c/b. On remarque également<br />
que la réaction à ϑ t est essentiellement linéaire, et c’est sur la dépendance de ϑ ρ que l’on voit le<br />
mieux l’effet du jeu. Cette situation s’accentue quand une charge radiale est appliquée (figure<br />
2.11(a)). Comme les rouleaux sont en contact dès que ϑ t s’annule, la réaction est ici plus<br />
régulière : on observe une proportionnalité entre ϑ t et m t accompagnée d’une indépendance<br />
de ϑ ρ . La réaction en m ρ est globalement similaire à celle décrite précédemment par la figure<br />
2.11, compte tenu de l’inversion de l’influence de ϑ ρ et ϑ t . La raideur angulaire observée est<br />
de l’ordre de 10 4 Nm/rad.<br />
Pour utiliser les résultats de cette modélisation dans une simulation <strong>dynamique</strong>, un grand<br />
nombre de calculs répétitifs sont à effectuer. Le calcul d’une valeur de f(δ) prend environ 0.01 s<br />
de temps cpu. Cela apparaît déjà prohibitif pour <strong>des</strong> simulations dans un cadre de <strong>dynamique</strong><br />
d’ensemble. Nous avons donc envisagé deux voies de réduction du temps de calcul <strong>des</strong> efforts<br />
dans les roulements :














