
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>경상대학교</strong> 물리학과 김현수<br />
<strong>경상대학교</strong> 물리학과 김현수<br />
9-1<br />
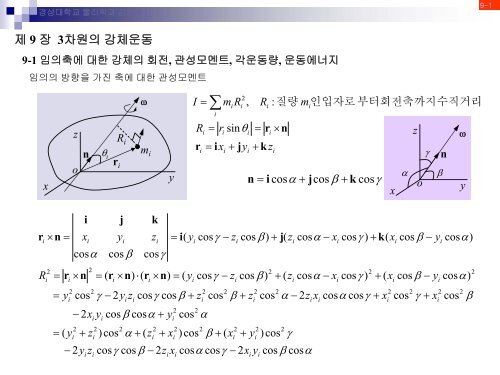
제 9 장 3차원의 강체운동<br />
9-1 임의축에 대한 강체의 회전, 관성모멘트, 각운동량, 운동에너지<br />
x<br />
y<br />
m i<br />
o<br />
R i<br />
z<br />
<strong>ω</strong><br />
r i<br />
θ i<br />
n<br />
임의의 방향을 가진 축에 대한 관성모멘트<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
z<br />
y<br />
x<br />
r<br />
R<br />
m<br />
R<br />
m R<br />
I<br />
k<br />
j<br />
i<br />
r<br />
n<br />
r<br />
+<br />
+<br />
=<br />
×<br />
=<br />
=<br />
= ∑<br />
sinθ<br />
:<br />
,<br />
2<br />
인입자로 부터회전축까지수직거리<br />
질량<br />
x<br />
y<br />
o<br />
z<br />
<strong>ω</strong><br />
n<br />
α<br />
β<br />
γ<br />
γ<br />
β<br />
α<br />
cos<br />
cos<br />
cos<br />
k<br />
j<br />
i<br />
n +<br />
+<br />
=<br />
α<br />
β<br />
γ<br />
α<br />
β<br />
γ<br />
γ<br />
β<br />
α<br />
α<br />
α<br />
β<br />
β<br />
γ<br />
γ<br />
α<br />
α<br />
β<br />
β<br />
γ<br />
γ<br />
α<br />
β<br />
γ<br />
α<br />
β<br />
γ<br />
α<br />
β<br />
γ<br />
α<br />
β<br />
γ<br />
γ<br />
β<br />
α<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
2<br />
)cos<br />
(<br />
)cos<br />
(<br />
)cos<br />
(<br />
cos<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
cos<br />
cos<br />
2<br />
cos<br />
)<br />
cos<br />
cos<br />
(<br />
)<br />
cos<br />
cos<br />
(<br />
)<br />
cos<br />
cos<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
cos<br />
cos<br />
(<br />
)<br />
cos<br />
cos<br />
(<br />
)<br />
cos<br />
cos<br />
(<br />
cos<br />
cos<br />
cos<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
y<br />
x<br />
x<br />
z<br />
z<br />
y<br />
y<br />
x<br />
x<br />
z<br />
z<br />
y<br />
y<br />
y<br />
x<br />
x<br />
x<br />
x<br />
z<br />
z<br />
z<br />
z<br />
y<br />
y<br />
y<br />
x<br />
x<br />
z<br />
z<br />
y<br />
R<br />
y<br />
x<br />
x<br />
z<br />
z<br />
y<br />
z<br />
y<br />
x<br />
−<br />
−<br />
−<br />
+<br />
+<br />
+<br />
+<br />
+<br />
=<br />
+<br />
−<br />
+<br />
+<br />
−<br />
+<br />
+<br />
−<br />
=<br />
−<br />
+<br />
−<br />
+<br />
−<br />
=<br />
×<br />
⋅<br />
×<br />
=<br />
×<br />
=<br />
−<br />
+<br />
−<br />
+<br />
−<br />
=<br />
=<br />
×<br />
n<br />
r<br />
n<br />
r<br />
n<br />
r<br />
k<br />
j<br />
i<br />
k<br />
j<br />
i<br />
n<br />
r
<strong>경상대학교</strong> 물리학과 김현수<br />
<strong>경상대학교</strong> 물리학과 김현수<br />
9-2<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
=<br />
−<br />
=<br />
=<br />
−<br />
=<br />
=<br />
−<br />
•<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
+<br />
=<br />
+<br />
=<br />
+<br />
−<br />
−<br />
−<br />
+<br />
+<br />
+<br />
+<br />
+<br />
=<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
곱<br />
관성의<br />
곱<br />
관성의<br />
곱<br />
관성의<br />
관성의곱<br />
축에대한 관성모멘트<br />
축에대한 관성모멘트<br />
축에대한 관성모멘트<br />
zx<br />
I<br />
I<br />
x<br />
m z<br />
yz<br />
I<br />
I<br />
z<br />
m y<br />
xy<br />
I<br />
I<br />
y<br />
m x<br />
z<br />
I<br />
y<br />
x<br />
m<br />
y<br />
I<br />
x<br />
z<br />
m<br />
x<br />
I<br />
z<br />
y<br />
m<br />
y<br />
m x<br />
x<br />
m z<br />
z<br />
m y<br />
y<br />
x<br />
m<br />
x<br />
z<br />
m<br />
z<br />
y<br />
m<br />
I<br />
xz<br />
zx<br />
i<br />
i<br />
i<br />
i<br />
zy<br />
yz<br />
i<br />
i<br />
i<br />
i<br />
yx<br />
xy<br />
i<br />
i<br />
i<br />
i<br />
zz<br />
i<br />
i<br />
i<br />
i<br />
yy<br />
i<br />
i<br />
i<br />
i<br />
xx<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
:<br />
:<br />
:<br />
:<br />
)<br />
(<br />
:<br />
)<br />
(<br />
:<br />
)<br />
(<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
2<br />
)cos<br />
(<br />
)cos<br />
(<br />
)cos<br />
(<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
α<br />
β<br />
γ<br />
α<br />
β<br />
γ<br />
γ<br />
β<br />
α<br />
일반축에 대한 관성모멘트<br />
β<br />
α<br />
γ<br />
α<br />
β<br />
γ<br />
γ<br />
β<br />
α<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
2<br />
cos<br />
cos<br />
cos<br />
2<br />
2<br />
2<br />
xy<br />
zx<br />
yz<br />
zz<br />
yy<br />
xx<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I +<br />
+<br />
+<br />
+<br />
+<br />
=<br />
∴<br />
[ ]<br />
)<br />
:<br />
~<br />
(<br />
cos<br />
cos<br />
cos<br />
cos<br />
cos<br />
cos<br />
~<br />
cos<br />
cos<br />
cos<br />
n<br />
,<br />
:<br />
)<br />
(<br />
의전치행열<br />
방향을향하는 축에대한 관성모멘트<br />
관성모멘트텐서<br />
나행렬로표시<br />
텐서<br />
n<br />
n<br />
nIn<br />
I<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
•<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
•<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
zz<br />
zy<br />
zx<br />
yz<br />
yy<br />
yx<br />
xz<br />
xy<br />
xx<br />
zz<br />
zy<br />
zx<br />
yz<br />
yy<br />
yx<br />
xz<br />
xy<br />
xx<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
n<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
tensor<br />
ji<br />
ij<br />
I<br />
I =<br />
- 관성의 곱은 질량분포와 좌표축에 대한<br />
강체의 방향에 관계<br />
- 실제의 강체에서 관성의 모멘트와 곱을 계산할 때<br />
: Σ→∫ ⎜ ⎜⎜⎜⎜ ⎝<br />
⎛<br />
+<br />
=<br />
+<br />
=<br />
+<br />
=<br />
∫<br />
∫<br />
∫<br />
dm<br />
y<br />
x<br />
I<br />
dm<br />
z<br />
x<br />
I<br />
dm<br />
z<br />
y<br />
I<br />
zz<br />
yy<br />
xx<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
= −<br />
=<br />
= −<br />
=<br />
= −<br />
=<br />
∫<br />
∫<br />
∫<br />
xzdm<br />
I<br />
I<br />
yzdm<br />
I<br />
I<br />
xydm<br />
I<br />
I<br />
xz<br />
zx<br />
zy<br />
yz<br />
yx<br />
xy
<strong>경상대학교</strong> 물리학과 김현수<br />
9-3<br />
1. 회전운동량<br />
L = N<br />
• dt<br />
d<br />
입자계에서회전운동방정식<br />
m i<br />
o<br />
R i<br />
<strong>ω</strong><br />
r i<br />
θ i<br />
n<br />
i<br />
i<br />
i<br />
i<br />
i m i<br />
r<br />
<strong>ω</strong><br />
v<br />
v<br />
r<br />
L<br />
×<br />
=<br />
•<br />
×<br />
=<br />
좌표계의원점에대한입자계의각운동량<br />
• 어떤<br />
∑<br />
구성입자의회전속도<br />
강체의<br />
[ ]<br />
∑<br />
∑<br />
∑<br />
∑<br />
⋅<br />
−<br />
=<br />
∴<br />
⋅<br />
−<br />
=<br />
⋅<br />
−<br />
⋅<br />
=<br />
×<br />
×<br />
×<br />
×<br />
=<br />
×<br />
=<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
m<br />
m r<br />
r<br />
m<br />
m<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
2<br />
2<br />
<strong>ω</strong><br />
r<br />
r<br />
<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
r<br />
r<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
r<br />
r<br />
r<br />
<strong>ω</strong> r<br />
r<br />
<strong>ω</strong><br />
r<br />
r<br />
<strong>ω</strong><br />
r<br />
v<br />
r<br />
L<br />
강체의각운동량<br />
<strong>ω</strong><br />
k<br />
j<br />
i<br />
<strong>ω</strong><br />
k<br />
k<br />
<strong>ω</strong><br />
j<br />
j<br />
<strong>ω</strong><br />
i<br />
i<br />
<strong>ω</strong><br />
kk<br />
jj<br />
ii<br />
<strong>ω</strong><br />
1<br />
kk<br />
jj<br />
ii<br />
1<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
1<br />
<strong>ω</strong><br />
r r<br />
1<br />
<strong>ω</strong><br />
r r<br />
<strong>ω</strong><br />
L<br />
=<br />
+<br />
+<br />
=<br />
⋅<br />
+<br />
⋅<br />
+<br />
⋅<br />
=<br />
⋅<br />
+<br />
+<br />
=<br />
⋅<br />
+<br />
+<br />
=<br />
=<br />
⋅<br />
⎥ ⋅<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
⎟ −<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
⎟ ⋅<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
•<br />
∑<br />
∑<br />
∑<br />
∑<br />
z<br />
y<br />
x<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
m<br />
m r<br />
m<br />
m r<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
:<br />
2<br />
2<br />
단위텐서<br />
텐서형태<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
1<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
1<br />
1<br />
)<br />
)(<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
(dyad product)<br />
:<br />
c<br />
b<br />
a<br />
d<br />
c<br />
ab<br />
d<br />
c<br />
b<br />
a<br />
c<br />
ab<br />
c<br />
b<br />
a<br />
c<br />
ab<br />
ab<br />
⋅<br />
⋅<br />
=<br />
⋅<br />
⋅<br />
∗<br />
⋅<br />
=<br />
+<br />
+<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⋅<br />
⋅<br />
=<br />
⋅<br />
•<br />
z<br />
z<br />
y<br />
y<br />
x<br />
x<br />
z<br />
y<br />
x<br />
z<br />
z<br />
y<br />
y<br />
x<br />
x<br />
z<br />
z<br />
z<br />
y<br />
y<br />
x<br />
x<br />
y<br />
z<br />
z<br />
y<br />
y<br />
x<br />
x<br />
x<br />
z<br />
y<br />
x<br />
z<br />
z<br />
y<br />
z<br />
x<br />
z<br />
z<br />
y<br />
y<br />
y<br />
x<br />
y<br />
z<br />
x<br />
y<br />
x<br />
x<br />
x<br />
c<br />
b<br />
c<br />
b<br />
c<br />
b<br />
a<br />
a<br />
a<br />
c<br />
b<br />
c<br />
b<br />
c<br />
b<br />
a<br />
c<br />
b<br />
c<br />
b<br />
c<br />
b<br />
a<br />
c<br />
b<br />
c<br />
b<br />
c<br />
b<br />
a<br />
c<br />
c<br />
c<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
형태의벡터곱 다이아드 곱<br />
[ ]<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
→<br />
z<br />
z<br />
y<br />
z<br />
x<br />
z<br />
z<br />
y<br />
y<br />
y<br />
x<br />
y<br />
z<br />
x<br />
y<br />
x<br />
x<br />
x<br />
z<br />
y<br />
x<br />
z<br />
y<br />
x<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
a<br />
b<br />
b<br />
b<br />
a<br />
a<br />
a<br />
ab
<strong>경상대학교</strong> 물리학과 김현수<br />
9-4<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
∑<br />
= −<br />
⎥ ⋅<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
+<br />
+<br />
⋅<br />
=<br />
⋅<br />
⋅<br />
=<br />
+<br />
=<br />
−<br />
=<br />
⎥ ⋅<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
+<br />
+<br />
⋅<br />
=<br />
⋅<br />
⋅<br />
=<br />
−<br />
=<br />
⋅<br />
⋅<br />
=<br />
•<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
xy<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
xx<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
ij<br />
y<br />
m x<br />
m<br />
m r<br />
I<br />
z<br />
y<br />
m<br />
m x<br />
m r<br />
m<br />
m r<br />
I<br />
m<br />
m r<br />
ij<br />
T<br />
j<br />
r r<br />
kk<br />
jj<br />
ii<br />
i<br />
j<br />
I<br />
i<br />
i<br />
r r<br />
kk<br />
jj<br />
ii<br />
i<br />
i<br />
I<br />
i<br />
r r<br />
1<br />
I<br />
T<br />
j<br />
T<br />
i<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
3<br />
:<br />
3<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
성분<br />
의<br />
차원텐서<br />
차원에서텐서<br />
<strong>ω</strong> = i<strong>ω</strong> x<br />
[보기]<br />
x<br />
y<br />
z<br />
= 0<br />
=<br />
=<br />
z<br />
y<br />
x<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
)<br />
(<br />
//<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
×<br />
→<br />
+<br />
+<br />
=<br />
∴<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⋅<br />
=<br />
<strong>ω</strong><br />
L<br />
k<br />
j<br />
i<br />
L<br />
k<br />
j<br />
i<br />
<strong>ω</strong><br />
I<br />
L<br />
zx<br />
yx<br />
xx<br />
z<br />
zz<br />
y<br />
zy<br />
x<br />
zx<br />
z<br />
yz<br />
y<br />
yy<br />
x<br />
yx<br />
z<br />
xz<br />
y<br />
xy<br />
x<br />
xx<br />
z<br />
zz<br />
y<br />
zy<br />
x<br />
zx<br />
z<br />
yz<br />
y<br />
yy<br />
x<br />
yx<br />
z<br />
xz<br />
y<br />
xy<br />
x<br />
xx<br />
z<br />
y<br />
x<br />
zz<br />
zy<br />
zx<br />
yz<br />
yy<br />
yx<br />
xz<br />
xy<br />
xx<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
r r<br />
1<br />
L<br />
⋅<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
⎟ −<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
= ∑<br />
∑<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
m<br />
r<br />
m 2 )<br />
(<br />
//<br />
:<br />
.<br />
×<br />
∗<br />
⋅<br />
=<br />
•<br />
<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
I<br />
L<br />
는반드시평행이라고 할 수없음<br />
과<br />
즉<br />
같다고 할 수는없음<br />
각운동량벡터의방향은반드시회전축방향과<br />
텐서표기법으로 각운동량
<strong>경상대학교</strong> 물리학과 김현수<br />
9-5<br />
[예제 9.1] 질량이 m이고한변이a 인 균질한 정사각형 판의 대각선에 대한 관성모멘트는?<br />
x<br />
y<br />
o<br />
z<br />
n<br />
α<br />
β<br />
γ<br />
a<br />
a<br />
m<br />
a<br />
2<br />
4<br />
2<br />
4<br />
2<br />
2<br />
0<br />
2<br />
0<br />
0<br />
2<br />
2<br />
4<br />
1<br />
4<br />
4<br />
2<br />
2<br />
2<br />
0<br />
0,<br />
0<br />
0,<br />
:<br />
0<br />
3<br />
2<br />
,<br />
3<br />
1<br />
ma<br />
a<br />
a<br />
m<br />
a<br />
a<br />
a<br />
ydy<br />
a<br />
xydxdy<br />
I<br />
I<br />
I<br />
I<br />
yz<br />
xz<br />
z<br />
ma<br />
I<br />
I<br />
I<br />
ma<br />
I<br />
I<br />
a<br />
a<br />
a<br />
yx<br />
xy<br />
yz<br />
xz<br />
yy<br />
xx<br />
zz<br />
yy<br />
xx<br />
= −<br />
= −<br />
= −<br />
⋅<br />
= −<br />
= −<br />
= −<br />
=<br />
=<br />
=<br />
→<br />
=<br />
=<br />
=<br />
=<br />
+<br />
=<br />
=<br />
=<br />
∫<br />
∫<br />
∫<br />
σ<br />
σ<br />
σ<br />
σ<br />
[ ]<br />
[ ] 2<br />
2<br />
1<br />
2<br />
1<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
2<br />
3<br />
2<br />
2<br />
3<br />
1<br />
2<br />
4<br />
1<br />
2<br />
4<br />
1<br />
2<br />
3<br />
1<br />
12<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
~<br />
,<br />
cos<br />
cos<br />
cos<br />
0<br />
0<br />
cos90<br />
cos<br />
,<br />
cos 45<br />
cos<br />
cos<br />
~<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
ma<br />
ma<br />
I<br />
I<br />
ma<br />
ma<br />
ma<br />
ma<br />
ma<br />
ma<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=<br />
∴<br />
=<br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=<br />
n<br />
k<br />
j<br />
i<br />
n<br />
nIn<br />
I<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
o<br />
o<br />
[예제 9.2] 회전운동량 계산<br />
(a) x축에 대한 회전<br />
x<br />
y<br />
o<br />
L<br />
a<br />
a<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
L<br />
⋅<br />
=<br />
=<br />
=<br />
=<br />
0<br />
z<br />
y<br />
x<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=<br />
⋅<br />
=<br />
j<br />
i<br />
<strong>ω</strong><br />
I<br />
L<br />
4<br />
1<br />
3<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
4<br />
1<br />
3<br />
1<br />
2<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
ma<br />
ma<br />
ma<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
+<br />
=<br />
+<br />
=<br />
+<br />
=<br />
∫<br />
∫<br />
∫<br />
dm<br />
y<br />
x<br />
I<br />
dm<br />
z<br />
x<br />
I<br />
dm<br />
z<br />
y<br />
I<br />
zz<br />
yy<br />
xx<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
= −<br />
=<br />
= −<br />
=<br />
= −<br />
=<br />
∫<br />
∫<br />
∫<br />
xzdm<br />
I<br />
I<br />
yzdm<br />
I<br />
I<br />
xydm<br />
I<br />
I<br />
xz<br />
zx<br />
zy<br />
yz<br />
yx<br />
xy<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
= 2<br />
a m<br />
σ
<strong>경상대학교</strong> 물리학과 김현수<br />
9-6<br />
(b) 원점을 지나는 대각선 축<br />
0<br />
2<br />
cos 45<br />
=<br />
=<br />
=<br />
=<br />
z<br />
y<br />
x<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
o<br />
x<br />
y<br />
o<br />
L<br />
a<br />
a<br />
<strong>ω</strong><br />
z<br />
<strong>ω</strong> x<br />
<strong>ω</strong> y ( )<br />
j<br />
i<br />
<strong>ω</strong><br />
I<br />
L +<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=<br />
⋅<br />
=<br />
2<br />
12<br />
0<br />
1<br />
1<br />
2<br />
12<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
2<br />
12<br />
1<br />
2<br />
12<br />
1<br />
2<br />
2<br />
2<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2 <strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
ma<br />
ma<br />
ma<br />
ma<br />
[ ]<br />
[ ] ( )<br />
12<br />
1<br />
1<br />
1<br />
2<br />
12<br />
0<br />
1<br />
1<br />
0<br />
1<br />
1<br />
2<br />
12<br />
~<br />
)<br />
(<br />
12<br />
5<br />
144<br />
25<br />
)<br />
(<br />
16<br />
1<br />
9<br />
1<br />
)<br />
(<br />
0<br />
0<br />
)<br />
(<br />
~<br />
)<br />
(<br />
)<br />
(<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
4<br />
1<br />
3<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
2<br />
2<br />
2<br />
1/<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
ma<br />
L<br />
ma<br />
ma<br />
L<br />
b<br />
ma<br />
L<br />
ma<br />
ma<br />
ma<br />
L<br />
L<br />
a<br />
=<br />
→<br />
+<br />
⎟<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎟<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
=<br />
=<br />
→<br />
=<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=<br />
=<br />
⋅<br />
=<br />
LL<br />
LL<br />
L<br />
L<br />
의경우<br />
의경우<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
0<br />
0<br />
0<br />
0<br />
ma<br />
I
<strong>경상대학교</strong> 물리학과 김현수<br />
9-7<br />
2. 강체의 회전운동에너지<br />
x<br />
y<br />
m i<br />
o<br />
R i<br />
z<br />
<strong>ω</strong><br />
r i<br />
θ i<br />
n<br />
L<br />
<strong>ω</strong><br />
v<br />
r<br />
<strong>ω</strong><br />
v<br />
r<br />
<strong>ω</strong><br />
C<br />
B<br />
A<br />
C<br />
B<br />
A<br />
v<br />
r<br />
<strong>ω</strong><br />
v<br />
v<br />
r<br />
<strong>ω</strong><br />
v<br />
⋅<br />
=<br />
×<br />
⋅<br />
=<br />
×<br />
⋅<br />
=<br />
×<br />
⋅<br />
=<br />
⋅<br />
×<br />
⋅<br />
×<br />
=<br />
⋅<br />
=<br />
×<br />
=<br />
∑<br />
∑<br />
∑<br />
∑<br />
2<br />
1<br />
)<br />
(<br />
2<br />
1<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
rot<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
rot<br />
i<br />
i<br />
m<br />
m<br />
T<br />
m<br />
m<br />
T<br />
회전운동에서<br />
[ ] ( )<br />
z<br />
y<br />
yz<br />
z<br />
x<br />
xz<br />
y<br />
x<br />
xy<br />
z<br />
zz<br />
y<br />
yy<br />
x<br />
xx<br />
z<br />
y<br />
x<br />
zz<br />
zy<br />
zx<br />
yz<br />
yy<br />
yx<br />
xz<br />
xy<br />
xx<br />
z<br />
y<br />
x<br />
rot<br />
rot<br />
cm<br />
trans<br />
rot<br />
cm<br />
trans<br />
cm<br />
cm<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
T<br />
T<br />
T<br />
T<br />
T<br />
T<br />
m<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong> 2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
1<br />
~<br />
2<br />
1<br />
2<br />
1<br />
,<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
,<br />
2<br />
2<br />
2<br />
+<br />
+<br />
+<br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
⋅<br />
⋅<br />
=<br />
⋅<br />
+<br />
⋅<br />
=<br />
+<br />
=<br />
⋅<br />
=<br />
=<br />
<strong>ω</strong>I<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
<strong>ω</strong><br />
p<br />
v<br />
L<br />
<strong>ω</strong><br />
p<br />
v<br />
v<br />
p<br />
v<br />
강체의전체운동에너지<br />
인 입자계의 병진운동에너지<br />
입자계의운동량이<br />
질량중심의속도가<br />
행렬표기<br />
[예제 9.3] (a) x축에 대한 회전 (정사각판)<br />
[ ]<br />
2<br />
2<br />
2<br />
2<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
2<br />
6<br />
1<br />
2<br />
1<br />
3<br />
1<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1 0 0<br />
2<br />
1<br />
~<br />
2<br />
1<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
ma<br />
ma<br />
ma<br />
T<br />
=<br />
⋅<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
= I<strong>ω</strong> =<br />
<strong>ω</strong><br />
(b) 대각선축에 대한 회전<br />
[ ]<br />
2<br />
2<br />
2<br />
1<br />
2<br />
1<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
2<br />
24<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
1<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
ma<br />
ma<br />
T<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=
<strong>경상대학교</strong> 물리학과 김현수<br />
9-8<br />
9.2 강체의 주축, 동력학적 균형<br />
0)<br />
(<br />
.<br />
0<br />
axis):<br />
principal<br />
( =<br />
=<br />
=<br />
=<br />
• 회전관성<br />
곱<br />
이되도록택한 축<br />
주축<br />
yz<br />
xz<br />
xy<br />
I<br />
I<br />
I<br />
.<br />
3<br />
3<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
:<br />
,<br />
,<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
3<br />
3<br />
3<br />
2<br />
2<br />
2<br />
1<br />
1<br />
1<br />
대칭행렬을대각선화시키는 문제와 동일<br />
강체의주축을 구하는 문제는 수학적으로<br />
강체의주축회전관성<br />
강체의주축을 좌표계의축으로잡으면<br />
×<br />
∴<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
•<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
z<br />
zz<br />
y<br />
yy<br />
x<br />
xx<br />
I<br />
e<br />
k<br />
e<br />
j<br />
e<br />
i<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
[ ]<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
2<br />
3<br />
2<br />
2<br />
2<br />
1<br />
3<br />
2<br />
1<br />
cos<br />
cos<br />
cos<br />
cos<br />
cos<br />
cos<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
cos<br />
cos<br />
cos<br />
~<br />
)<br />
cos<br />
,<br />
cos<br />
,<br />
(cos<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
•<br />
nIn<br />
회전축방향의단위백터 n<br />
3<br />
3<br />
3<br />
2<br />
2<br />
2<br />
1<br />
1<br />
1<br />
3<br />
3<br />
2<br />
2<br />
1<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
)<br />
,<br />
,<br />
(<br />
,<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
e<br />
e<br />
e<br />
I<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
n<br />
<strong>ω</strong><br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
주축에대한 성분<br />
과같은 방향<br />
는<br />
각속도<br />
회전운동에너지<br />
임의의회전축에대한 회전운동량 및<br />
좌표축이주축과일치하는 좌표계에서<br />
[ ]<br />
( )<br />
2<br />
3<br />
3<br />
2<br />
2<br />
2<br />
2<br />
1<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
2<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
1<br />
~<br />
2<br />
1<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
T rot +<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
= I<strong>ω</strong><br />
<strong>ω</strong>
<strong>경상대학교</strong> 물리학과 김현수<br />
9-9<br />
1. 주축의 존재<br />
• 대칭인 강체는 대칭축이 주축이 됨<br />
(곱 회전관성 = 0)<br />
• 임의 모양의 평면판 강체의 주축<br />
I<br />
y’<br />
z = 0<br />
xy<br />
z<br />
:<br />
2<br />
= −<br />
I<br />
∫<br />
xz<br />
y<br />
= I<br />
yz<br />
= 0<br />
xy dm = 0<br />
x’<br />
dm<br />
이되는 축<br />
1<br />
x<br />
→ 주축<br />
• 강체가 주축중의 하나인 1축에 대한 회전<br />
<strong>ω</strong> = <strong>ω</strong><br />
1,<br />
<strong>ω</strong>2<br />
= <strong>ω</strong>2<br />
= 0<br />
L = e1I 1<strong>ω</strong>1<br />
= I1<strong>ω</strong><br />
각운동량과 각속도는 같은 방향<br />
. 회전축이 주축의 방향이면 각운동량과<br />
각속도의 방향이 일치함<br />
[예제 9.4] (a) 직육면체 토막의 질량중심에 대한 주축 (표8.1)<br />
(b) 탁구 라켓의 주축<br />
I = I<br />
I<br />
I<br />
I<br />
1<br />
2<br />
3<br />
1<br />
2 2 m 2 2<br />
( b + c ),<br />
I = ( a + c )<br />
m<br />
I1<br />
=<br />
2<br />
12<br />
12<br />
m 2 2<br />
I3<br />
= ( a + b )<br />
12<br />
점O를<br />
지나는임의축에대한<br />
회전관성<br />
I = I<br />
cos<br />
I = I(cos<br />
2<br />
2<br />
rod<br />
α + I<br />
+ I<br />
2<br />
α + cos<br />
disc<br />
cos<br />
정육면체(<br />
a = b = c) : I<br />
2<br />
1 ⎛ m ⎞<br />
= 0 + ⎜ ⎟a<br />
4 ⎝ 2 ⎠<br />
1 ⎛ m ⎞<br />
= ⎜ ⎟(2a)<br />
3 ⎝ 2 ⎠<br />
1 ⎛ m ⎞<br />
= ⎜ ⎟(2a)<br />
3 ⎝ 2 ⎠<br />
2<br />
2<br />
2<br />
2<br />
=<br />
+<br />
+<br />
β + I<br />
1<br />
β + cos<br />
1<br />
8<br />
5<br />
4<br />
3<br />
2<br />
= I<br />
⎛<br />
⎜<br />
⎝<br />
⎛<br />
⎜<br />
⎝<br />
3<br />
2<br />
2<br />
ma<br />
cos<br />
= I<br />
2<br />
m ⎞<br />
⎟a<br />
2 ⎠<br />
m ⎞<br />
⎟a<br />
2 ⎠<br />
2<br />
2<br />
2<br />
3<br />
γ ) =<br />
,<br />
γ<br />
1<br />
6<br />
31<br />
= ma<br />
24<br />
=<br />
3<br />
b<br />
cos<br />
ma<br />
17<br />
12<br />
2<br />
2<br />
c<br />
2a<br />
3<br />
ma<br />
2<br />
2<br />
a<br />
α + cos<br />
O<br />
2<br />
→ I<br />
2<br />
O<br />
2<br />
3<br />
β + cos<br />
a<br />
= I<br />
1<br />
2<br />
+ I<br />
2<br />
1<br />
γ = 1<br />
1
<strong>경상대학교</strong> 물리학과 김현수<br />
9-10<br />
2. 동력학적 균형<br />
정력학적 균형 : 회전축 → CM<br />
동력학적 균형 : 회전축 →주축<br />
L<br />
<strong>ω</strong><br />
dL = N<br />
dt<br />
강체에는 토오크가<br />
작용<br />
3. 한 개의 주축이 알려졌을 때, 다른 주축을 구하는 방법<br />
I<br />
zx<br />
x<br />
1<br />
L<br />
= I<br />
L = I <strong>ω</strong> = I<br />
z 3<br />
2<br />
θ<br />
y<br />
<strong>ω</strong><br />
= 0,<br />
⎡<strong>ω</strong>x<br />
⎤<br />
⎢ ⎥<br />
⎢<br />
<strong>ω</strong><br />
y<br />
⎥<br />
⎢⎣<br />
0 ⎥⎦<br />
= I<br />
≠ 0<br />
주축1에대한 회전 ( L // <strong>ω</strong>)<br />
1<br />
zy<br />
1<br />
I<br />
zz<br />
3<br />
I<br />
1<br />
xyz 기준계에서각운동량의행렬표기<br />
⎡I<br />
xx<br />
I<br />
xy<br />
0 ⎤ ⎡<strong>ω</strong>x<br />
⎤ ⎡I<br />
xx<strong>ω</strong>x<br />
+ I<br />
xy<strong>ω</strong><br />
y ⎤<br />
L = I<strong>ω</strong> =<br />
⎢<br />
I I 0<br />
⎥ ⎢<br />
<strong>ω</strong><br />
⎥ ⎢<br />
I<br />
xy<strong>ω</strong>x<br />
I<br />
yy<strong>ω</strong><br />
⎥<br />
⎢<br />
xy yy<br />
⎥ ⎢<br />
y<br />
⎥<br />
=<br />
⎢<br />
+<br />
y<br />
⎥<br />
⎢⎣<br />
0 0 I ⎥<br />
3⎦<br />
⎢⎣<br />
0 ⎥⎦<br />
⎢⎣<br />
0 ⎥⎦<br />
I <strong>ω</strong> + I <strong>ω</strong> = I <strong>ω</strong> , I <strong>ω</strong> + I <strong>ω</strong> = I <strong>ω</strong><br />
주축1과<br />
x 축 사이의 각도<br />
I<br />
xx<br />
xx<br />
x<br />
+ I<br />
xy<br />
를 소거<br />
= I<br />
xy<br />
y<br />
1<br />
tanθ<br />
= I<br />
1<br />
x<br />
xy<br />
x<br />
<strong>ω</strong><br />
y<br />
: θ →<br />
<strong>ω</strong><br />
= tanθ<br />
L(1),<br />
I + I tanθ<br />
= I tanθ L(2)<br />
[ − (1) × tanθ<br />
+ (2)]<br />
2 tanθ<br />
tan 2θ<br />
= =<br />
2<br />
1−<br />
tan θ I<br />
If<br />
I<br />
I<br />
xx<br />
xy<br />
yy<br />
→ tan 2θ<br />
= ∞<br />
= 0 → tan 2θ<br />
= 0<br />
2I<br />
xx<br />
xy<br />
− I<br />
xy<br />
→ ( I<br />
yy<br />
∴45<br />
yy<br />
yy<br />
yy<br />
o<br />
o o<br />
∴0<br />
, 90<br />
y<br />
− I<br />
,135<br />
x<br />
xx<br />
o<br />
1<br />
y<br />
1<br />
) tanθ<br />
= I<br />
y<br />
2<br />
(예9.1)<br />
xy<br />
o<br />
135<br />
(tan<br />
y<br />
2<br />
θ −1)<br />
1<br />
o<br />
45<br />
x<br />
x
<strong>경상대학교</strong> 물리학과 김현수<br />
9-11<br />
4. 회전관성 행렬의 대각화로 주축을 구하는 방법<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⋅<br />
−<br />
→<br />
⋅<br />
=<br />
=<br />
⋅<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
:<br />
where,<br />
0<br />
)<br />
(<br />
1<br />
3<br />
2<br />
1 I<br />
I<br />
I<br />
I<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
i<br />
주축이 일때<br />
주축에대한 주관성모멘트<br />
λ<br />
λ<br />
λ<br />
λ<br />
e<br />
1<br />
I<br />
e<br />
1<br />
e<br />
e<br />
I<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
+<br />
+<br />
+<br />
−<br />
=<br />
−<br />
−<br />
−<br />
=<br />
−<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
2<br />
3<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
:<br />
,<br />
,<br />
)<br />
(<br />
:<br />
,<br />
,<br />
0<br />
0<br />
0<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
I<br />
I<br />
C<br />
B<br />
A<br />
C<br />
B<br />
A<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
zz<br />
zy<br />
zx<br />
yz<br />
yy<br />
yx<br />
xz<br />
xy<br />
xx<br />
i<br />
주관성모멘트<br />
방정식의세실근<br />
와는 무관<br />
의함수<br />
1<br />
I<br />
1)<br />
(<br />
1<br />
cos<br />
cos<br />
cos<br />
0<br />
cos<br />
cos<br />
cos<br />
0<br />
)<br />
(<br />
cos<br />
cos<br />
cos<br />
cos<br />
cos<br />
cos<br />
1<br />
1<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
=<br />
⋅<br />
=<br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
−<br />
=<br />
⋅<br />
−<br />
→<br />
=<br />
⋅<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
e<br />
e<br />
e<br />
1<br />
I<br />
e<br />
e<br />
I<br />
Q<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
γ<br />
β<br />
α<br />
λ<br />
γ<br />
β<br />
α<br />
<strong>ω</strong><br />
zz<br />
zy<br />
zx<br />
yz<br />
yy<br />
yx<br />
xz<br />
xy<br />
xx<br />
zz<br />
zy<br />
zx<br />
yz<br />
yy<br />
yx<br />
xz<br />
xy<br />
xx<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
<strong>ω</strong><br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
주축의 단위벡터에 대해<br />
임의의 xyz-좌표계에서 좌표축이 주축이 되도록<br />
회전하여 그 단위벡터들이 위 식을 만족하는 조건<br />
L<br />
<strong>ω</strong><br />
1<br />
2<br />
3<br />
x<br />
y<br />
z<br />
e 1<br />
α 1<br />
β 1<br />
γ 1<br />
원래 좌표계에 대한<br />
주축방향 구하기<br />
)<br />
//<br />
(<br />
)<br />
cos<br />
,<br />
cos<br />
,<br />
(cos<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
L<br />
e<br />
e<br />
<strong>ω</strong><br />
←<br />
=<br />
⋅<br />
=<br />
=<br />
=<br />
λ<br />
γ<br />
β<br />
α<br />
<strong>ω</strong>
<strong>경상대학교</strong> 물리학과 김현수<br />
9-12<br />
[예제 9.6] 정사각판의 한 구석에 대한<br />
주 관성모멘트 (예제 9.1)<br />
x<br />
z<br />
y<br />
a<br />
a<br />
0<br />
)<br />
3<br />
2<br />
(<br />
0<br />
0<br />
0<br />
)<br />
3<br />
1<br />
(<br />
4<br />
1<br />
0<br />
4<br />
1<br />
)<br />
3<br />
1<br />
(<br />
2 =<br />
−<br />
−<br />
−<br />
−<br />
−<br />
ma<br />
λ<br />
λ<br />
λ<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
=<br />
→<br />
= ±<br />
−<br />
=<br />
∴<br />
=<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
=<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
⎟ −<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
2<br />
2<br />
2<br />
1<br />
2<br />
3<br />
2<br />
2<br />
2<br />
2<br />
12<br />
7<br />
12<br />
1<br />
4<br />
1<br />
3<br />
1<br />
3<br />
2<br />
0<br />
3<br />
2<br />
4<br />
1<br />
3<br />
1<br />
0<br />
3<br />
2<br />
4<br />
1<br />
3<br />
2<br />
3<br />
1<br />
ma<br />
ma<br />
ma<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
λ<br />
[예제 9.7] 정사각판의 한 구석에 대한 주축방향<br />
1<br />
cos<br />
cos<br />
cos<br />
0<br />
)cos<br />
(<br />
0,<br />
)cos<br />
(<br />
cos<br />
0,<br />
cos<br />
)cos<br />
(<br />
0<br />
cos<br />
cos<br />
cos<br />
)<br />
(<br />
0<br />
0<br />
0<br />
)<br />
(<br />
0<br />
)<br />
(<br />
2<br />
2<br />
2<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
=<br />
+<br />
+<br />
=<br />
−<br />
=<br />
−<br />
+<br />
−<br />
=<br />
−<br />
−<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
−<br />
−<br />
−<br />
γ<br />
β<br />
α<br />
γ<br />
λ<br />
β<br />
λ<br />
α<br />
β<br />
α<br />
λ<br />
γ<br />
β<br />
α<br />
λ<br />
λ<br />
λ<br />
and<br />
ma<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡−<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
1<br />
0<br />
0<br />
,<br />
0<br />
1<br />
1<br />
2<br />
1<br />
,<br />
0<br />
1<br />
1<br />
2<br />
1<br />
)<br />
(cos<br />
3<br />
2<br />
1 e<br />
e<br />
e<br />
을취함<br />
원래의좌표계에서본 주축<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
=<br />
3<br />
2<br />
3<br />
1<br />
4<br />
1<br />
4<br />
1<br />
3<br />
1<br />
2<br />
0<br />
0<br />
0<br />
0<br />
ma<br />
I<br />
2<br />
3<br />
2<br />
12<br />
7<br />
12<br />
1<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
2<br />
1<br />
2<br />
3<br />
3<br />
3<br />
3<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
90<br />
0<br />
cos<br />
45<br />
,<br />
135<br />
0<br />
cos<br />
cos<br />
12<br />
7<br />
90<br />
0<br />
cos<br />
0,<br />
cos<br />
cos<br />
45<br />
0<br />
cos<br />
cos<br />
12<br />
1<br />
,<br />
3<br />
2<br />
90<br />
,<br />
0<br />
:<br />
ma<br />
ma<br />
ma<br />
ma<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
→<br />
=<br />
=<br />
=<br />
→<br />
=<br />
+<br />
=<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
→<br />
=<br />
=<br />
+<br />
−<br />
=<br />
=<br />
→<br />
=<br />
−<br />
=<br />
=<br />
=<br />
=<br />
=<br />
I<br />
o<br />
o<br />
o<br />
o<br />
o<br />
o<br />
o<br />
γ<br />
γ<br />
β<br />
α<br />
β<br />
α<br />
λ<br />
γ<br />
γ<br />
β<br />
α<br />
β<br />
α<br />
β<br />
α<br />
λ<br />
λ<br />
β<br />
α<br />
γ<br />
을대입<br />
을대입<br />
적어도 주축중의하나는 사각판에수직
<strong>경상대학교</strong> 물리학과 김현수<br />
9-13<br />
9.3 강체에 대한 Euler 운동방정식<br />
(5.16)<br />
3<br />
3<br />
3<br />
2<br />
2<br />
2<br />
1<br />
1<br />
1<br />
L<br />
<strong>ω</strong><br />
L<br />
L<br />
e<br />
e<br />
e<br />
L<br />
L<br />
N<br />
×<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
•<br />
+<br />
+<br />
=<br />
=<br />
•<br />
rot<br />
fixed<br />
dt<br />
d<br />
dt<br />
d<br />
I<br />
I<br />
I<br />
dt<br />
d<br />
고정된관성계와 회전계에서각운동량의시간변화율<br />
강체의경우 주축을 좌표축으로 사용하면<br />
입자계의회전운동방정식<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
1. 고정축 주위로 돌고 있는 강체<br />
즉 토오크가전혀없음<br />
토오크의세성분은 모두영<br />
이면<br />
회전축이주축<br />
방정식<br />
회전하는강체<br />
고정축 주위로일정한 각속도로<br />
;<br />
0<br />
0<br />
,<br />
1<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
Euler<br />
0<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
1<br />
2<br />
2<br />
1<br />
3<br />
3<br />
1<br />
1<br />
3<br />
2<br />
2<br />
3<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
•<br />
−<br />
=<br />
−<br />
=<br />
−<br />
=<br />
=<br />
=<br />
=<br />
•<br />
N<br />
N<br />
N<br />
I<br />
I<br />
N<br />
I<br />
I<br />
N<br />
I<br />
I<br />
N<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
&<br />
&<br />
&<br />
방정식<br />
강체의운동에관한<br />
을행렬표기<br />
여기서<br />
회전계에서의운동방정식<br />
Euler<br />
:<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
(1)<br />
)<br />
(<br />
(1)<br />
1<br />
2<br />
2<br />
1<br />
3<br />
1<br />
1<br />
3<br />
2<br />
3<br />
3<br />
2<br />
3<br />
3<br />
2<br />
2<br />
1<br />
1<br />
3<br />
2<br />
1<br />
3<br />
3<br />
2<br />
2<br />
1<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
−<br />
+<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⋅<br />
×<br />
=<br />
×<br />
⋅<br />
=<br />
×<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
•<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
N<br />
N<br />
N<br />
I<br />
I<br />
I<br />
dt<br />
d<br />
rot<br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
&<br />
&<br />
&<br />
&<br />
&<br />
L<br />
e<br />
e<br />
e<br />
<strong>ω</strong><br />
I<br />
<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
L<br />
L<br />
<strong>ω</strong><br />
L<br />
N
<strong>경상대학교</strong> 물리학과 김현수<br />
9-14<br />
9.4 강체의 자유회전 : 기하학적 논의<br />
• 강체의 자유회전운동 ( N = 0 )<br />
(예) - 질량중심 주위에 자유로이 회전할 수<br />
있도록되어있는경우.<br />
- 균일한 중력장에서 자유낙하 하면서<br />
자유 회전하는 강체의 경우.<br />
N = 0 → L = const.<br />
• 강체에 고정된 회전축에 대해서 각운동량의<br />
크기는 일정해도 방향은 변할 수 있음.<br />
L ⋅L<br />
= const.<br />
2<br />
I <strong>ω</strong> + I <strong>ω</strong> + I <strong>ω</strong> = L<br />
2<br />
1<br />
회전운동에너지 <strong>ω</strong> ⋅L<br />
= 2T<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
3<br />
2<br />
3<br />
2<br />
3<br />
2<br />
3<br />
I <strong>ω</strong> + I <strong>ω</strong> + I <strong>ω</strong> = const.<br />
3<br />
T : 일정<br />
= const.<br />
rot<br />
= const.<br />
3<br />
3<br />
<strong>ω</strong><br />
o<br />
o<br />
2<br />
2<br />
2<br />
세차운동 없음<br />
<strong>ω</strong><br />
안정<br />
1<br />
세차운동 없음<br />
안정<br />
1<br />
불안정<br />
1<br />
o<br />
p<br />
<strong>ω</strong><br />
L : 일정<br />
2<br />
: Poinsot 타원체<br />
I <<br />
1<br />
< I<br />
2<br />
I3<br />
3<br />
o<br />
<strong>ω</strong><br />
<strong>ω</strong> 의 세차운동<br />
1
<strong>경상대학교</strong> 물리학과 김현수<br />
9-15<br />
9.5 대칭축을 가진 강체의 자유회전 : 해석적 방법<br />
•강체가 어떤 대칭축을 가지고 있어서 세 관성모멘트 중 2개가 같은<br />
특별한 경우의 Euler 방정식의 풀이<br />
3 축이 대칭축일때<br />
I s<br />
= I3<br />
I = I1<br />
=<br />
I<br />
대칭축에대한 관성모멘트<br />
2<br />
Euler 방정식<br />
⎡N<br />
⎢<br />
⎢<br />
N<br />
⎢⎣<br />
N<br />
1<br />
2<br />
3<br />
대칭축에수직인축에대한<br />
관성모멘트<br />
⎤ ⎡ I &<br />
1<strong>ω</strong>1<br />
⎤ ⎡<strong>ω</strong>2<strong>ω</strong>3<br />
( I<br />
⎥ ⎢ ⎥ ⎢<br />
⎥<br />
=<br />
⎢<br />
I &<br />
2<strong>ω</strong>2<br />
⎥<br />
+<br />
⎢<br />
<strong>ω</strong>3<strong>ω</strong>1<br />
( I<br />
⎥⎦<br />
⎢⎣<br />
I & ⎥ ⎢<br />
3<strong>ω</strong>3<br />
⎦ ⎣<strong>ω</strong>1<strong>ω</strong><br />
2(<br />
I<br />
N = 0일때Euler<br />
방정식<br />
) ⎤<br />
)<br />
⎥<br />
⎥<br />
) ⎥⎦<br />
⎛ I & <strong>ω</strong>1<br />
+ <strong>ω</strong>2<strong>ω</strong>3(<br />
I<br />
s<br />
− I)<br />
= 0<br />
⎜<br />
⎜ I & <strong>ω</strong>2<br />
+ <strong>ω</strong>3<strong>ω</strong>1<br />
( I − I<br />
s<br />
) = 0<br />
⎜<br />
⎝ I &<br />
s<strong>ω</strong>3<br />
= 0 → <strong>ω</strong>3<br />
= const.<br />
I<br />
s<br />
− I<br />
put Ω = <strong>ω</strong>3<br />
: 세차운동의회전진동수<br />
I<br />
3<br />
1<br />
2<br />
− I<br />
− I<br />
2<br />
3<br />
− I<br />
1<br />
⎛ & <strong>ω</strong>1<br />
+ Ω<strong>ω</strong><br />
= 0 → &&<br />
2<br />
<strong>ω</strong> + Ω &<br />
1<br />
<strong>ω</strong>2<br />
= 0<br />
⎜<br />
⎝ & <strong>ω</strong>2<br />
− Ω<strong>ω</strong>1<br />
= 0<br />
2<br />
&& <strong>ω</strong> + Ω <strong>ω</strong> = 0 → <strong>ω</strong> = <strong>ω</strong> cosΩt<br />
1<br />
& <strong>ω</strong> = −Ω<strong>ω</strong><br />
sin Ωt<br />
→ <strong>ω</strong> = <strong>ω</strong> sin Ωt<br />
1<br />
1<br />
0<br />
<strong>ω</strong> = <strong>ω</strong> cosα<br />
1<br />
2<br />
o<br />
o<br />
1<br />
<strong>ω</strong> 3<br />
o<br />
3<br />
Ω<br />
α<br />
<strong>ω</strong> o<br />
대칭축을같는 강체의자유회전 →회전속도벡터는<br />
대칭축 주위의원뿔을 따라 세차운동<br />
I<br />
s<br />
− I<br />
세차운동의회전진동수 : Ω = <strong>ω</strong>3<br />
I<br />
대칭축과(3<br />
− 축)<br />
회전축사이의각도:<br />
α<br />
3<br />
∴Ω =<br />
I<br />
s<br />
− I<br />
I<br />
<strong>ω</strong> cosα<br />
<strong>ω</strong><br />
2
<strong>경상대학교</strong> 물리학과 김현수<br />
9-16<br />
9.6 고정계에 대한 강체의 회전 : Euler 각도<br />
3<br />
z’<br />
<strong>ω</strong><br />
z<br />
L<br />
2<br />
α<br />
θ<br />
o<br />
φ ψ 1<br />
x<br />
x’<br />
O123계에서<strong>ω</strong>의성분<br />
고정좌표계 Oxyz ↔ Ox’y’z’↔ 주축으로 된 좌표계 O123,<br />
y’ 강체의회전속도 <strong>ω</strong>,<br />
Ox'<br />
y'<br />
z'<br />
계에서회전속도 <strong>ω</strong>'<br />
<strong>ω</strong> 는 z'(3)<br />
축에대한 회전 ψ&<br />
에Ox'<br />
y'<br />
z'<br />
좌표계에서의<br />
y<br />
회전<strong>ω</strong>'<br />
이겹친것임<br />
Ox'<br />
y'<br />
z'<br />
계에서<strong>ω</strong>'<br />
의성분<br />
Ox'<br />
y'<br />
z'<br />
계에서<strong>ω</strong>의성분<br />
⎛<strong>ω</strong>'<br />
= & θ<br />
⎛<br />
x'<br />
<strong>ω</strong> = &<br />
x'<br />
θ<br />
⎜<br />
⎜<br />
⎜<strong>ω</strong>'<br />
'<br />
= & φ<br />
'<br />
= &<br />
y y<br />
φ sinθ<br />
⎜<strong>ω</strong><br />
= &<br />
y'<br />
φ sinθ<br />
⎜<br />
⎜<br />
⎝<strong>ω</strong>'<br />
'<br />
= & φ<br />
'<br />
= &<br />
z z<br />
φ cosθ<br />
⎝<strong>ω</strong><br />
= & φ cosθ<br />
+ ψ&<br />
z'<br />
⎛<strong>ω</strong><br />
= <strong>ω</strong> ψ + <strong>ω</strong> ψ = & θ ψ + &<br />
1 x'<br />
cos<br />
y'<br />
sin cos φ sinθ<br />
sinψ<br />
⎜<br />
⎡<strong>ω</strong><br />
⎤ ⎡ ψ ψ ⎤⎡<br />
& ⎤<br />
1<br />
cos sin 0 θ<br />
⎜<strong>ω</strong><br />
= <strong>ω</strong> ( −sinψ<br />
) + <strong>ω</strong> cosψ<br />
= − & θ sinψ<br />
+ &<br />
⎢ ⎥ ⎢<br />
⎥⎢<br />
⎥<br />
2 x'<br />
y'<br />
φ sinθ<br />
cosψ<br />
⇒<br />
⎜<br />
⎢<br />
<strong>ω</strong><br />
⎥<br />
=<br />
⎢<br />
− ψ ψ &<br />
2<br />
sin cos 0<br />
⎥⎢<br />
φ sinθ<br />
⎥<br />
⎜<br />
⎝<strong>ω</strong><br />
= <strong>ω</strong> = & φ cosθ<br />
+ ψ&<br />
⎢ ⎥ ⎢<br />
⎥⎢<br />
⎥<br />
3 z'<br />
⎣<strong>ω</strong><br />
&<br />
⎦ ⎣ 0 0 1⎦⎣φ<br />
cosθ<br />
+ ψ&<br />
3<br />
⎦<br />
• 강체에 토오크가 작용하지 않는 경우에 각운동량 L은 고정계인 Oxyz계에서 크기와 방향이 일정<br />
L의방향 : z 축방향→불변선(invariable line)<br />
• Ox'<br />
y'<br />
z'<br />
계에서 L 성분<br />
고정좌표계와 주축좌표계의 연계 :<br />
( L = 0, L = Lsinθ,<br />
L L cosθ )<br />
x ' y'<br />
z'<br />
=<br />
φ, θ,<br />
ψ : Euler 각도
<strong>경상대학교</strong> 물리학과 김현수<br />
9-17<br />
강체의회전속도:<br />
<strong>ω</strong><br />
3 z’<br />
θ<br />
2<br />
y'<br />
dt시간 후 강체의무한소회전각도:<br />
dβ<br />
dβ<br />
= <strong>ω</strong>dt<br />
= dφ<br />
+ dθ<br />
+ dψ<br />
∴<strong>ω</strong><br />
= φ& + θ&<br />
+ ψ&<br />
, <strong>ω</strong>'<br />
= φ&<br />
+ θ&<br />
θ &<br />
ψ& φ&<br />
φ<br />
ψ<br />
1<br />
<strong>ω</strong><br />
<strong>ω</strong>'<br />
x'<br />
x,1<br />
z, 3<br />
φ&<br />
dφ<br />
x'<br />
dφ<br />
z', 3<br />
y, 2<br />
dθ<br />
dφ<br />
θ &<br />
φ&<br />
x'<br />
y'<br />
z', 3<br />
ψ&<br />
dθ<br />
φ&<br />
dψ<br />
dψ<br />
dφ<br />
마디선<br />
θ & 2<br />
x'<br />
y'<br />
1
<strong>경상대학교</strong> 물리학과 김현수<br />
9-18<br />
s<br />
z<br />
z<br />
y<br />
y<br />
x<br />
x<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
z<br />
y<br />
x<br />
z<br />
y<br />
x<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
⎟<br />
⎟<br />
⎠<br />
⎞<br />
•<br />
'<br />
'<br />
3<br />
'<br />
'<br />
'<br />
'<br />
2<br />
1 ,<br />
:<br />
'<br />
',<br />
',<br />
: 3<br />
'<br />
2<br />
:1,<br />
'<br />
,<br />
'<br />
3<br />
주축<br />
축<br />
축<br />
축<br />
평면<br />
축<br />
축<br />
대칭축이 축인강체의경우<br />
평면에놓이게됨<br />
성분이없으므로<br />
는<br />
상수<br />
에서<br />
'<br />
'<br />
'<br />
0<br />
0<br />
0<br />
,<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
z<br />
y<br />
x<br />
I<br />
I<br />
L<br />
L<br />
x<br />
x<br />
x<br />
x<br />
x<br />
x<br />
x<br />
x<br />
<strong>ω</strong><br />
θ<br />
θ<br />
θ<br />
<strong>ω</strong><br />
θ<br />
<strong>ω</strong><br />
=<br />
∴<br />
=<br />
→<br />
=<br />
=<br />
=<br />
=<br />
=<br />
•<br />
&<br />
&<br />
&<br />
α<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
α<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
α<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
α<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
α<br />
cos<br />
,<br />
sin<br />
cos<br />
,<br />
sin<br />
:<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
s<br />
z<br />
z<br />
z<br />
z<br />
y<br />
y<br />
y<br />
y<br />
z<br />
y<br />
I<br />
I<br />
L<br />
I<br />
I<br />
L<br />
z<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
• 각<br />
축 사이의<br />
와<br />
벡터<br />
각속도<br />
<strong>ω</strong><br />
∗<br />
=<br />
=<br />
•<br />
α L<br />
θ<br />
α<br />
θ<br />
tan<br />
tan<br />
'<br />
'<br />
s<br />
z<br />
y<br />
I<br />
I<br />
L<br />
L<br />
사이의관계<br />
와<br />
각도<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
→<br />
><br />
><br />
→<br />
<<br />
<<br />
(body cone)<br />
:<br />
(space cone)<br />
:<br />
) :<br />
(<br />
) :<br />
(<br />
강체원뿔<br />
가 지나가는 곡면<br />
대칭축 주위에<br />
공간원뿔<br />
가 지나가는 곡면<br />
주위에<br />
각운동량벡터<br />
회전축이대칭축과각운동량벡터 사이에있음<br />
길쭉한 강체<br />
각운동량벡터가대칭축과 회전축 사이에있음<br />
납작한 강체<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
L<br />
α<br />
θ<br />
α<br />
θ<br />
s<br />
s<br />
I<br />
I<br />
I<br />
I<br />
2<br />
1/<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
tan<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
'<br />
cot<br />
1<br />
sin<br />
cot<br />
1<br />
1<br />
tan<br />
tan<br />
cos<br />
1<br />
sin<br />
tan<br />
1<br />
1<br />
cos<br />
tan<br />
1<br />
cos<br />
1<br />
)<br />
tan<br />
1<br />
(sec<br />
sin<br />
sin<br />
sin<br />
sin<br />
2<br />
2<br />
2<br />
2<br />
2<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
= ⎡ +<br />
∴ +<br />
=<br />
+<br />
=<br />
−<br />
=<br />
+<br />
=<br />
+<br />
=<br />
∴<br />
+<br />
=<br />
→<br />
+<br />
=<br />
∗<br />
=<br />
→<br />
=<br />
=<br />
α<br />
θ<br />
α<br />
α<br />
α<br />
θ<br />
θ<br />
α<br />
θ<br />
α<br />
θ<br />
θ<br />
θ<br />
θ<br />
α<br />
<strong>ω</strong><br />
φ<br />
α<br />
<strong>ω</strong><br />
θ<br />
φ<br />
<strong>ω</strong><br />
α<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
s<br />
I<br />
I<br />
s<br />
s<br />
s<br />
I<br />
I<br />
s<br />
y<br />
s<br />
s<br />
및<br />
식<br />
&<br />
&<br />
2<br />
1/<br />
2<br />
2<br />
2<br />
2<br />
1/<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1/<br />
2<br />
2<br />
2<br />
cos<br />
1<br />
1<br />
cos<br />
sin<br />
cot<br />
1<br />
sin<br />
sin<br />
sin<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
⎟<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
+<br />
=<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
+<br />
=<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡ +<br />
=<br />
=<br />
∴<br />
α<br />
<strong>ω</strong><br />
α<br />
α<br />
<strong>ω</strong><br />
α<br />
α<br />
<strong>ω</strong><br />
θ<br />
α<br />
<strong>ω</strong><br />
φ<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
s<br />
s<br />
s<br />
&<br />
y'<br />
z'<br />
L<br />
<strong>ω</strong><br />
θ<br />
α<br />
강체원뿔<br />
공간원뿔
<strong>경상대학교</strong> 물리학과 김현수<br />
9-19<br />
대칭축을 갖는 강체의 자유회전에 대한 요약 → 기본적으로 세 개의 각도 변화율이 있음<br />
: 1. 회전속도의 크기 <strong>ω</strong>, 2. 대칭축에 대한 회전축 (<strong>ω</strong>의방향)의세차율Ω<br />
3. 불변선(각운동량벡터)에 대한 대칭축의 세차율 & φ 가 기본임.<br />
[예제 9.8] 프레스비의 세차운동<br />
3<br />
1<br />
대칭성<br />
α<br />
I<br />
θ<br />
2<br />
L<br />
수직축정리<br />
= I<br />
1<br />
→ 2I<br />
= I<br />
s<br />
I<br />
<strong>ω</strong><br />
3<br />
→<br />
→<br />
= I<br />
+ I<br />
= 2<br />
2<br />
1 2<br />
2I1<br />
= I3<br />
I<br />
I<br />
s<br />
Ω =<br />
⎛<br />
⎜<br />
⎝<br />
&<br />
⎡ ⎛ I<br />
φ = <strong>ω</strong> ⎢1<br />
+<br />
⎜<br />
⎣ ⎝ I<br />
= <strong>ω</strong><br />
I<br />
I<br />
s<br />
⎞<br />
−1⎟<br />
<strong>ω</strong> cosα<br />
= <strong>ω</strong> cosα<br />
⎠<br />
2<br />
s<br />
2<br />
⎞<br />
−1<br />
⎟cos<br />
⎠<br />
2<br />
( 1+<br />
3cos α )<br />
1/ 2<br />
α
<strong>경상대학교</strong> 물리학과 김현수<br />
9-20<br />
9.7 자이로 세차운동 : 팽이의 운동<br />
x<br />
y<br />
z<br />
x’<br />
y’<br />
z’<br />
l<br />
1<br />
2<br />
3<br />
mg<br />
θ<br />
φ<br />
ψ<br />
cm<br />
cm<br />
mg l θ o<br />
y’<br />
z<br />
z’<br />
)<br />
sin<br />
( θ<br />
l<br />
모멘트팔<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
=<br />
=<br />
=<br />
×<br />
=<br />
0<br />
0<br />
sin<br />
sin<br />
'<br />
'<br />
'<br />
z<br />
y<br />
x<br />
N<br />
N<br />
mgl<br />
N<br />
mgl<br />
N<br />
θ<br />
θ<br />
F<br />
r<br />
N<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
+<br />
=<br />
=<br />
=<br />
ψ<br />
θ<br />
φ<br />
<strong>ω</strong><br />
θ<br />
φ<br />
<strong>ω</strong><br />
θ<br />
<strong>ω</strong><br />
&<br />
&<br />
&<br />
&<br />
cos<br />
sin<br />
'<br />
'<br />
'<br />
z<br />
y<br />
x<br />
<strong>ω</strong>의성분<br />
L<br />
<strong>ω</strong><br />
L<br />
N<br />
L<br />
×<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
•<br />
=<br />
+<br />
=<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
+<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
•<br />
'<br />
'<br />
'<br />
'<br />
)<br />
:<br />
cos<br />
(<br />
)<br />
cos<br />
(<br />
sin<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
rot<br />
z<br />
s<br />
s<br />
z<br />
z<br />
z<br />
z<br />
y<br />
y<br />
y<br />
y<br />
x<br />
x<br />
x<br />
x<br />
dt<br />
d<br />
z<br />
y<br />
x<br />
S<br />
S<br />
I<br />
I<br />
I<br />
L<br />
I<br />
I<br />
L<br />
I<br />
I<br />
L<br />
계에서운동방정식<br />
스핀<br />
의성분<br />
ψ<br />
θ<br />
φ<br />
<strong>ω</strong><br />
ψ<br />
θ<br />
φ<br />
<strong>ω</strong><br />
θ<br />
φ<br />
<strong>ω</strong><br />
θ<br />
<strong>ω</strong><br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
S<br />
I<br />
I<br />
I<br />
s<br />
θ<br />
φ<br />
θ<br />
θ<br />
φ<br />
θ<br />
φ<br />
θ<br />
sin<br />
cos<br />
sin<br />
'<br />
'<br />
'<br />
&<br />
&<br />
&<br />
&<br />
&<br />
k<br />
j<br />
i<br />
.<br />
cos<br />
sin<br />
0<br />
sin<br />
cos<br />
cos<br />
2sin<br />
sin<br />
)<br />
cos<br />
sin<br />
(<br />
0<br />
.,<br />
.<br />
0,<br />
sin<br />
sin<br />
0<br />
cos<br />
2<br />
sin<br />
(2)<br />
cos<br />
)<br />
sin<br />
(<br />
0<br />
(1)<br />
cos<br />
sin<br />
sin<br />
sin<br />
2<br />
2<br />
2<br />
'<br />
2<br />
const<br />
L<br />
S<br />
I<br />
I<br />
S<br />
I<br />
S<br />
I<br />
I<br />
I<br />
S<br />
I<br />
I<br />
const<br />
S<br />
I<br />
L<br />
const<br />
S<br />
S<br />
I<br />
I<br />
S<br />
I<br />
S<br />
I<br />
I<br />
I<br />
I<br />
S<br />
I<br />
I<br />
I<br />
S<br />
I<br />
I<br />
mg<br />
z<br />
s<br />
s<br />
s<br />
s<br />
dt<br />
d<br />
s<br />
z<br />
s<br />
s<br />
s<br />
dt<br />
d<br />
s<br />
=<br />
=<br />
+<br />
→<br />
=<br />
−<br />
+<br />
+<br />
+<br />
=<br />
=<br />
=<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
=<br />
→<br />
−<br />
+<br />
=<br />
−<br />
+<br />
=<br />
+<br />
−<br />
=<br />
−<br />
+<br />
=<br />
•<br />
θ<br />
θ<br />
φ<br />
θ<br />
θ<br />
θ<br />
θ θ<br />
θ<br />
φ<br />
θ<br />
φ<br />
θ<br />
θ<br />
φ<br />
θ<br />
θφ<br />
θ<br />
θφ<br />
θ<br />
θ<br />
θφ<br />
θ<br />
φ<br />
θ<br />
θφ<br />
θ<br />
θ<br />
φ<br />
θ<br />
θ<br />
φ<br />
θ<br />
φ<br />
θ<br />
θ<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&&<br />
L<br />
&<br />
&<br />
&<br />
&<br />
L<br />
&<br />
&<br />
&&<br />
l<br />
성분별로<br />
θ<br />
θ<br />
θ<br />
φ<br />
θ<br />
θ<br />
)cos<br />
(<br />
)sin<br />
sin<br />
(<br />
cos<br />
sin<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
'<br />
'<br />
'<br />
'<br />
'<br />
S<br />
I<br />
I<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
s<br />
z<br />
y<br />
Z<br />
z<br />
Z<br />
y<br />
Z<br />
x<br />
z<br />
+<br />
=<br />
+<br />
=<br />
+<br />
+<br />
=<br />
&
<strong>경상대학교</strong> 물리학과 김현수<br />
9-21<br />
mglsinθ<br />
= I && θ + I & φ sinθ<br />
& φ<br />
2<br />
sS<br />
− I sinθ<br />
cosθ<br />
o<br />
• 특수한경우 θ = 90 , & θ = & θ<br />
= 0<br />
(1) → mgl<br />
= I<br />
sS<br />
&<br />
2. 조용한 팽이 : 세차운동이 없음<br />
φ<br />
&<br />
z’ 3<br />
dL<br />
θ = 0 = 상수,<br />
φ = 실수<br />
N =<br />
2 2<br />
dt<br />
I s<br />
S ≥ 4mglI,<br />
팽이가 쓰러졌을때:<br />
θ = 90<br />
1. 자이로스코프의 고른 세차운동<br />
mg<br />
l<br />
o<br />
• θ 가일정하지만 90 가 아닐때<br />
& θ = && θ = 0<br />
2<br />
(1) → mglsinθ<br />
= I S & φ sinθ<br />
− I &<br />
s<br />
φ cosθ<br />
sinθ<br />
2<br />
mgl<br />
= I S & φ − I &<br />
s<br />
φ cosθ<br />
2<br />
( I cosθ<br />
) & φ − I S & φ + mgl<br />
= 0<br />
s<br />
2 2<br />
± − 4 cos<br />
∴ &<br />
I<br />
sS<br />
I<br />
s<br />
S mglI<br />
θ<br />
φ =<br />
2I<br />
cosθ<br />
+ : 빠른 세차운동,<br />
− : 느린세차운동<br />
9.9 에너지방정식과 장동<br />
• 자이로스코프에 마찰력이 작용하지 않으면<br />
에너지보존<br />
• 전체에너지 T<br />
+ V =<br />
2 2 2<br />
( I<strong>ω</strong><br />
+ I<strong>ω</strong><br />
+ I S ) + mg cosθ<br />
= E<br />
E<br />
= 상수<br />
rot<br />
1<br />
2 x'<br />
y'<br />
s<br />
l<br />
• Euler 각도를 쓰면<br />
( I & 2<br />
θ + I & 2 2<br />
2<br />
φ sin θ + I S ) + mg cosθ<br />
E<br />
1<br />
2<br />
s<br />
l =<br />
o<br />
보통의 경우 팽이나 자이로스코프는 느린<br />
것이 일어남.<br />
2<br />
I s<br />
S<br />
2<br />
≥ 4mglI<br />
cosθ<br />
: & φ 가 실수일조건<br />
Lz<br />
− I<br />
sS<br />
cosθ<br />
Lz<br />
− Lz<br />
cosθ<br />
(9.107) → &<br />
'<br />
φ =<br />
=<br />
2<br />
2<br />
I sin θ I sin θ<br />
2<br />
1 Lz<br />
− Lz<br />
θ<br />
I & 2 (<br />
'<br />
cos ) 1 2<br />
θ +<br />
+ I<br />
sS<br />
+ mgl<br />
cosθ<br />
=<br />
2<br />
2 2I<br />
sin θ 2<br />
E
<strong>경상대학교</strong> 물리학과 김현수<br />
9-22<br />
유효포텐셜<br />
:<br />
cos<br />
sin<br />
2<br />
)<br />
cos<br />
(<br />
)<br />
(<br />
)<br />
(<br />
2<br />
1<br />
2<br />
1<br />
'<br />
cos<br />
sin<br />
2<br />
)<br />
cos<br />
(<br />
2<br />
1<br />
2<br />
1<br />
2<br />
2<br />
'<br />
2<br />
2<br />
2<br />
2<br />
'<br />
2<br />
2<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
l<br />
&<br />
l<br />
&<br />
mg<br />
I<br />
L<br />
L<br />
V<br />
V<br />
I<br />
S<br />
I<br />
E<br />
E<br />
mg<br />
I<br />
L<br />
L<br />
I<br />
S<br />
I<br />
E<br />
z<br />
z<br />
s<br />
z<br />
z<br />
s<br />
+<br />
−<br />
=<br />
+<br />
=<br />
−<br />
=<br />
+<br />
−<br />
+<br />
+<br />
=<br />
0 ~ 1<br />
:<br />
~ 90<br />
0<br />
:<br />
0<br />
)<br />
(<br />
0<br />
)<br />
(<br />
:<br />
3<br />
:<br />
)<br />
(<br />
where,<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
2<br />
)(2<br />
(1<br />
sin<br />
)<br />
cos<br />
(<br />
)<br />
cos<br />
2<br />
(2<br />
2<br />
cos<br />
2<br />
sin<br />
)<br />
cos<br />
(<br />
)<br />
(1<br />
,<br />
)<br />
(1<br />
)<br />
(sin<br />
,<br />
cos<br />
put,<br />
2<br />
2<br />
2<br />
'<br />
1<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
'<br />
1<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
'<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1/<br />
2<br />
u<br />
u<br />
f<br />
u<br />
f<br />
t<br />
u<br />
f<br />
u<br />
f<br />
du<br />
dt<br />
t<br />
u<br />
f<br />
u<br />
dt<br />
du<br />
u<br />
f<br />
u<br />
I<br />
u<br />
L<br />
L<br />
I<br />
u<br />
mg<br />
S<br />
I<br />
E<br />
u<br />
u<br />
I<br />
L<br />
L<br />
I<br />
mg<br />
S<br />
I<br />
E<br />
I<br />
E<br />
I<br />
mg<br />
I<br />
S<br />
I<br />
I<br />
L<br />
L<br />
u<br />
u<br />
u<br />
u<br />
u<br />
z<br />
z<br />
s<br />
z<br />
z<br />
s<br />
s<br />
z<br />
z<br />
→<br />
=<br />
><br />
→<br />
←<br />
=<br />
=<br />
=<br />
=<br />
=<br />
−<br />
−<br />
−<br />
−<br />
−<br />
=<br />
−<br />
−<br />
−<br />
−<br />
=<br />
=<br />
+<br />
+<br />
−<br />
+<br />
−<br />
=<br />
−<br />
= −<br />
= −<br />
=<br />
∫<br />
∫<br />
−<br />
−<br />
−<br />
o<br />
o<br />
&<br />
&<br />
l<br />
&<br />
l<br />
&<br />
l<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
의 근<br />
실수<br />
차 다항식<br />
타원적분<br />
의 형태<br />
f(u)<br />
u<br />
-1<br />
0 1<br />
u 3<br />
u 2<br />
u 1 )<br />
(nutation<br />
:<br />
~<br />
~<br />
2<br />
1<br />
2<br />
1<br />
진동하는것<br />
세차운동을 하면서<br />
장동<br />
θ<br />
→θ<br />
u<br />
u<br />
물리학적인 근이 아님<br />
f(u)<br />
u<br />
-1 1<br />
: 장동이 없고 팽이는<br />
고른 세차운동<br />
f(u)<br />
u<br />
-1 1<br />
: 조용한 팽이에 대한 조건<br />
V (θ )<br />
1<br />
θ 2<br />
θ<br />
θ<br />
E'
<strong>경상대학교</strong> 물리학과 김현수<br />
9-23<br />
9.9 자이로 나침판<br />
z <strong>ω</strong> e <strong>ω</strong> e y’<br />
N<br />
S<br />
r e λ<br />
λ<br />
λ<br />
<strong>ω</strong><br />
λ<br />
<strong>ω</strong><br />
sin<br />
) :<br />
'<br />
(<br />
cos<br />
) :<br />
(<br />
e<br />
e<br />
y<br />
성분<br />
축<br />
수직성분<br />
수평성분 북쪽방향성분<br />
i’<br />
φ<br />
N χ k’<br />
E<br />
S<br />
W<br />
자이로스코프의<br />
회전축<br />
0<br />
,<br />
90 =<br />
= l<br />
o<br />
θ<br />
φ<br />
λ<br />
<strong>ω</strong><br />
λ<br />
<strong>ω</strong><br />
φ<br />
λ<br />
<strong>ω</strong><br />
sin<br />
cos<br />
'<br />
sin<br />
'<br />
cos<br />
cos<br />
'<br />
'<br />
'<br />
'<br />
e<br />
e<br />
e<br />
e<br />
z<br />
y<br />
x<br />
k<br />
j<br />
i<br />
<strong>ω</strong> +<br />
+<br />
=<br />
• 계에서<br />
s<br />
e<br />
e<br />
e<br />
e<br />
e<br />
I<br />
I<br />
I<br />
I<br />
I<br />
z<br />
y<br />
x<br />
=<br />
=<br />
=<br />
+<br />
+<br />
+<br />
+<br />
=<br />
+<br />
+<br />
=<br />
+<br />
=<br />
+<br />
=<br />
•<br />
3<br />
2<br />
1 ,<br />
)<br />
sin<br />
cos<br />
'(<br />
)<br />
sin<br />
'(<br />
cos<br />
cos<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
'<br />
자이로스코프의주 관성모멘트<br />
자이로스코프의각속도<br />
계에서<br />
의비율로 돌고있으므로<br />
수직축을 중심으로<br />
φ<br />
λ<br />
<strong>ω</strong><br />
ψ<br />
λ<br />
<strong>ω</strong><br />
φ<br />
φ<br />
λ<br />
<strong>ω</strong><br />
ψ<br />
φ<br />
ψ<br />
φ<br />
φ<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
k<br />
j<br />
i<br />
k<br />
j<br />
<strong>ω</strong><br />
k<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
j<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
φ<br />
λ<br />
<strong>ω</strong><br />
ψ<br />
λ<br />
<strong>ω</strong><br />
φ<br />
φ<br />
λ<br />
<strong>ω</strong><br />
sin<br />
cos<br />
,<br />
'<br />
)<br />
sin<br />
(<br />
'<br />
cos<br />
cos<br />
'<br />
e<br />
s<br />
e<br />
e<br />
S<br />
where<br />
S<br />
I<br />
I<br />
I<br />
+<br />
=<br />
+<br />
+<br />
+<br />
=<br />
&<br />
&<br />
k<br />
j<br />
i<br />
L<br />
S<br />
I<br />
I<br />
I<br />
dt<br />
d<br />
s<br />
e<br />
e<br />
e<br />
e<br />
e<br />
rot<br />
)<br />
sin<br />
(<br />
cos<br />
cos<br />
sin<br />
cos<br />
sin<br />
cos<br />
cos<br />
'<br />
'<br />
'<br />
'<br />
λ<br />
<strong>ω</strong><br />
φ<br />
φ<br />
λ<br />
<strong>ω</strong><br />
φ<br />
λ<br />
<strong>ω</strong><br />
φ<br />
λ<br />
<strong>ω</strong><br />
φ<br />
λ<br />
<strong>ω</strong><br />
+<br />
+<br />
×<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
•<br />
&<br />
&<br />
k<br />
j<br />
i<br />
L<br />
<strong>ω</strong><br />
L<br />
N<br />
회전좌표계에대한 운동방정식<br />
( ) ( )<br />
( ) ( )<br />
( )<br />
φ<br />
λ<br />
<strong>ω</strong><br />
φ<br />
φ<br />
λ<br />
<strong>ω</strong><br />
φ<br />
λ<br />
<strong>ω</strong><br />
φ<br />
φ<br />
λ<br />
<strong>ω</strong><br />
cos<br />
cos<br />
sin<br />
cos<br />
cos<br />
0<br />
.<br />
0,<br />
'<br />
0<br />
'<br />
sin<br />
0<br />
'<br />
cos<br />
cos<br />
2<br />
2<br />
'<br />
'<br />
'<br />
e<br />
s<br />
e<br />
z<br />
s<br />
y<br />
e<br />
x<br />
e<br />
S<br />
I<br />
I<br />
I<br />
const<br />
S<br />
dt<br />
dS<br />
dt<br />
dS<br />
I<br />
dt<br />
d<br />
I<br />
dt<br />
d<br />
I<br />
N<br />
−<br />
+<br />
=<br />
=<br />
∴<br />
=<br />
→<br />
×<br />
+<br />
=<br />
×<br />
+<br />
+<br />
=<br />
×<br />
+<br />
=<br />
•<br />
&&<br />
&<br />
L<br />
<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
성분별로<br />
⎟<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
=<br />
=<br />
=<br />
+<br />
= −<br />
= −<br />
=<br />
→<br />
−<br />
=<br />
λ<br />
<strong>ω</strong><br />
π<br />
<strong>ω</strong><br />
π<br />
χ<br />
χ<br />
λ<br />
<strong>ω</strong><br />
χ<br />
χ<br />
φ<br />
χ<br />
φ<br />
χ<br />
φ<br />
χ<br />
φ<br />
χ<br />
φ<br />
cos<br />
2<br />
2<br />
0<br />
:<br />
0<br />
sin<br />
cos<br />
,<br />
,<br />
sin<br />
cos<br />
90<br />
0<br />
e<br />
s<br />
e<br />
s<br />
S<br />
I<br />
I<br />
T<br />
I<br />
S<br />
I<br />
주위로진동<br />
로 표현하면 편리<br />
의 여각인<br />
&&<br />
&&<br />
&&<br />
&<br />
&<br />
o
<strong>경상대학교</strong> 물리학과 김현수<br />
9-24<br />
9.10 강체의 일반적인 운동 : 굴러가는 바퀴<br />
dt<br />
d<br />
dt<br />
d<br />
m<br />
com L<br />
N<br />
v<br />
F<br />
=<br />
=<br />
•<br />
:<br />
(2)<br />
:<br />
(1)<br />
질량중심에대한 회전운동<br />
질량중심의병진운동<br />
일반적운동<br />
<br />
k’<br />
j’<br />
mg<br />
φ &<br />
<strong>ω</strong><br />
θ<br />
o<br />
p<br />
운동의 일반 방정식<br />
)<br />
(<br />
,<br />
op<br />
po<br />
com<br />
com<br />
op<br />
p<br />
op<br />
com<br />
p<br />
dt<br />
d<br />
m<br />
dt<br />
d<br />
m<br />
dt<br />
d<br />
dt<br />
d<br />
m<br />
m<br />
r<br />
<strong>ω</strong><br />
r<br />
<strong>ω</strong><br />
v<br />
L<br />
g<br />
v<br />
r<br />
L<br />
F<br />
r<br />
v<br />
g<br />
F<br />
−<br />
×<br />
=<br />
×<br />
=<br />
=<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
×<br />
=<br />
×<br />
=<br />
+<br />
질량중심의속도<br />
[ ]<br />
(9.139)<br />
'<br />
)<br />
'cos<br />
'sin<br />
(<br />
'<br />
')<br />
(<br />
'<br />
'<br />
'<br />
'<br />
)<br />
'cos<br />
'sin<br />
(<br />
')<br />
(<br />
'<br />
:<br />
),<br />
'cos<br />
'sin<br />
(<br />
',<br />
2<br />
L<br />
L<br />
<strong>ω</strong><br />
L<br />
k<br />
j<br />
j<br />
j<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
j<br />
<strong>ω</strong><br />
j<br />
<strong>ω</strong><br />
k<br />
j<br />
j<br />
<strong>ω</strong><br />
j<br />
L<br />
k<br />
j<br />
g<br />
j<br />
r<br />
×<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
+<br />
×<br />
−<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
×<br />
×<br />
+<br />
×<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
×<br />
−<br />
×<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
+<br />
+<br />
×<br />
×<br />
= −<br />
+<br />
= −<br />
= −<br />
rot<br />
rot<br />
rot<br />
op<br />
dt<br />
d<br />
mga<br />
dt<br />
d<br />
ma<br />
dt<br />
d<br />
dt<br />
d<br />
mg<br />
a<br />
dt<br />
d<br />
m<br />
a<br />
dt<br />
d<br />
a<br />
g<br />
a<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
θ<br />
회전좌표계에서<br />
바퀴의반경<br />
에대입<br />
특별한경우 고른 굴림<br />
(9.139)<br />
'<br />
'<br />
'<br />
(9.102)<br />
'<br />
'<br />
'<br />
(9.93)<br />
'<br />
'<br />
'<br />
(9.92)<br />
,<br />
sin<br />
,<br />
sin<br />
1<br />
1,<br />
90<br />
,<br />
90<br />
:steady rolling)<br />
(<br />
→<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
⎞<br />
+<br />
+<br />
= −<br />
→<br />
+<br />
+<br />
= −<br />
→<br />
+<br />
= −<br />
→<br />
= −<br />
≈<br />
≈<br />
<strong>경상대학교</strong> 물리학과 김현수<br />
9-25<br />
S<br />
I<br />
S<br />
I<br />
I<br />
S<br />
I<br />
I<br />
mga<br />
S<br />
S<br />
ma<br />
s<br />
s<br />
s<br />
&<br />
&<br />
&&<br />
&<br />
&&<br />
&<br />
&<br />
&<br />
&<br />
'<br />
)<br />
'(<br />
)<br />
'(<br />
'<br />
)<br />
'<br />
'<br />
'<br />
(<br />
2<br />
k<br />
j<br />
i<br />
i<br />
i<br />
k<br />
i +<br />
+<br />
+<br />
+<br />
−<br />
=<br />
−<br />
−<br />
−<br />
χ<br />
φ<br />
φ<br />
χ<br />
χ<br />
φ<br />
χ<br />
[ ]<br />
)<br />
(<br />
0<br />
)<br />
(<br />
0<br />
)<br />
(<br />
)<br />
(<br />
(1)<br />
(1)<br />
:<br />
0<br />
0,<br />
(2)<br />
:<br />
(3)<br />
(3)<br />
)<br />
(<br />
0<br />
(2)<br />
0<br />
(1)<br />
)<br />
(<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
ma<br />
I<br />
I<br />
Imga<br />
S<br />
Imga<br />
S<br />
ma<br />
I<br />
I<br />
Imga<br />
S<br />
ma<br />
I<br />
I<br />
ma<br />
I<br />
I<br />
I<br />
S<br />
I<br />
S<br />
I<br />
I<br />
S<br />
ma<br />
I<br />
S<br />
S<br />
I<br />
S<br />
ma<br />
S<br />
I<br />
I<br />
S<br />
I<br />
I<br />
mga<br />
S<br />
ma<br />
s<br />
s<br />
s<br />
s<br />
s<br />
s<br />
s<br />
s<br />
s<br />
s<br />
s<br />
s<br />
+<br />
><br />
∴<br />
><br />
−<br />
+<br />
⋅<br />
=<br />
−<br />
+<br />
+<br />
+<br />
→<br />
= −<br />
→<br />
=<br />
+<br />
=<br />
=<br />
→<br />
→<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎛<br />
+<br />
=<br />
→<br />
=<br />
−<br />
+<br />
=<br />
+<br />
= −<br />
−<br />
−<br />
바퀴가안정하게굴러가려면<br />
에대입<br />
초기조건<br />
일정<br />
성분별<br />
χ<br />
χ<br />
χ<br />
φ<br />
χ<br />
φ<br />
φ<br />
χ<br />
χ<br />
φ<br />
φ<br />
χ<br />
χ<br />
φ<br />
χ<br />
&&<br />
&<br />
&<br />
&<br />
L<br />
&<br />
&<br />
&<br />
L<br />
&<br />
&&<br />
L<br />
&<br />
&&<br />
&<br />
&&<br />
17.6 cm/s<br />
0.176 m/s<br />
3<br />
10<br />
0.95<br />
9.8<br />
3<br />
,<br />
3<br />
)<br />
2(<br />
,<br />
2<br />
1<br />
2<br />
9.12<br />
2<br />
1/<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
2<br />
=<br />
=<br />
⎟<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎜<br />
⎝<br />
⎛ ×<br />
×<br />
><br />
><br />
=<br />
=<br />
=<br />
+<br />
><br />
=<br />
=<br />
−<br />
v<br />
ga<br />
v<br />
aS<br />
v<br />
v<br />
a<br />
g<br />
ma<br />
ma<br />
mga<br />
S<br />
ma<br />
I<br />
I<br />
CM<br />
s<br />
굴러가는 동전<br />
예제
<strong>경상대학교</strong> 물리학과 김현수<br />
1. 아래 그림처럼 H=6 cm, L=9 cm 인 두 직각삼각형<br />
금속판이 놓여 있다. 이 구조의 질량중심의 위치를<br />
구하여 그림에 표시하시오.<br />
y<br />
2. 10 kg의입자는y가 줄어드는 방향으로 30 m/s 의<br />
속도로 움직이고, 20 kg 의입자는x가 증가하는<br />
방향으로 20 m/s의 속도로 움직인다. 두 입자계의<br />
질량중심의 속력은 얼마인가?<br />
H<br />
y<br />
O<br />
H<br />
y<br />
: (<br />
dy<br />
x<br />
L<br />
H − y)<br />
= L : x → x =<br />
( H − y)<br />
L<br />
dm = σ ⋅ dy<br />
H<br />
CM<br />
=<br />
=<br />
∫<br />
∫<br />
L<br />
2<br />
y<br />
Ly<br />
ydm<br />
dm<br />
2<br />
H<br />
0<br />
H<br />
0<br />
=<br />
∫<br />
0<br />
H<br />
∫<br />
0<br />
L<br />
−<br />
3H<br />
L<br />
−<br />
2H<br />
H<br />
y<br />
y<br />
( H − y)<br />
L<br />
H<br />
( H − y)<br />
L<br />
y dy<br />
H<br />
( H − y)<br />
L<br />
dy<br />
H<br />
3<br />
0<br />
H<br />
0<br />
H<br />
2<br />
=<br />
=<br />
∫<br />
0<br />
H<br />
∫<br />
0<br />
2<br />
LH LH<br />
−<br />
2 3<br />
LH<br />
LH −<br />
2<br />
x<br />
⎛ L<br />
⎜ Ly −<br />
⎝ H<br />
⎛ L<br />
⎜ L −<br />
⎝ H<br />
H<br />
2<br />
=<br />
LH<br />
6<br />
LH<br />
2<br />
2<br />
2 ⎞<br />
y ⎟dy<br />
⎠<br />
⎞<br />
y⎟dy<br />
⎠<br />
=<br />
1<br />
3<br />
H<br />
v<br />
m<br />
m<br />
1<br />
2<br />
CM<br />
∴v<br />
= 10 kg,<br />
= 20 kg,<br />
1<br />
= −10ˆj<br />
+<br />
CM<br />
=<br />
m1v<br />
m<br />
=<br />
=<br />
50<br />
3<br />
1<br />
v<br />
1<br />
v<br />
2<br />
+ m2v<br />
+ m<br />
( −10)<br />
= −30ˆj<br />
(m/s)<br />
2<br />
40 ˆi<br />
3<br />
2<br />
= 20ˆi<br />
(m/s)<br />
2<br />
⎛<br />
+ ⎜<br />
⎝<br />
(m/s)<br />
40<br />
3<br />
= 16.67 m/s<br />
−10×<br />
30ˆj<br />
+ 20×<br />
20ˆi<br />
=<br />
10 + 20<br />
2<br />
⎞<br />
⎟<br />
⎠<br />
=<br />
2500<br />
9
<strong>경상대학교</strong> 물리학과 김현수