
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>경상대학교</strong> 물리학과 김현수<br />
9-10<br />
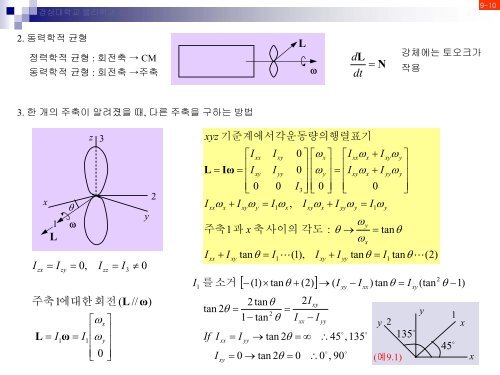
2. 동력학적 균형<br />
정력학적 균형 : 회전축 → CM<br />
동력학적 균형 : 회전축 →주축<br />
L<br />
<strong>ω</strong><br />
dL = N<br />
dt<br />
강체에는 토오크가<br />
작용<br />
3. 한 개의 주축이 알려졌을 때, 다른 주축을 구하는 방법<br />
I<br />
zx<br />
x<br />
1<br />
L<br />
= I<br />
L = I <strong>ω</strong> = I<br />
z 3<br />
2<br />
θ<br />
y<br />
<strong>ω</strong><br />
= 0,<br />
⎡<strong>ω</strong>x<br />
⎤<br />
⎢ ⎥<br />
⎢<br />
<strong>ω</strong><br />
y<br />
⎥<br />
⎢⎣<br />
0 ⎥⎦<br />
= I<br />
≠ 0<br />
주축1에대한 회전 ( L // <strong>ω</strong>)<br />
1<br />
zy<br />
1<br />
I<br />
zz<br />
3<br />
I<br />
1<br />
xyz 기준계에서각운동량의행렬표기<br />
⎡I<br />
xx<br />
I<br />
xy<br />
0 ⎤ ⎡<strong>ω</strong>x<br />
⎤ ⎡I<br />
xx<strong>ω</strong>x<br />
+ I<br />
xy<strong>ω</strong><br />
y ⎤<br />
L = I<strong>ω</strong> =<br />
⎢<br />
I I 0<br />
⎥ ⎢<br />
<strong>ω</strong><br />
⎥ ⎢<br />
I<br />
xy<strong>ω</strong>x<br />
I<br />
yy<strong>ω</strong><br />
⎥<br />
⎢<br />
xy yy<br />
⎥ ⎢<br />
y<br />
⎥<br />
=<br />
⎢<br />
+<br />
y<br />
⎥<br />
⎢⎣<br />
0 0 I ⎥<br />
3⎦<br />
⎢⎣<br />
0 ⎥⎦<br />
⎢⎣<br />
0 ⎥⎦<br />
I <strong>ω</strong> + I <strong>ω</strong> = I <strong>ω</strong> , I <strong>ω</strong> + I <strong>ω</strong> = I <strong>ω</strong><br />
주축1과<br />
x 축 사이의 각도<br />
I<br />
xx<br />
xx<br />
x<br />
+ I<br />
xy<br />
를 소거<br />
= I<br />
xy<br />
y<br />
1<br />
tanθ<br />
= I<br />
1<br />
x<br />
xy<br />
x<br />
<strong>ω</strong><br />
y<br />
: θ →<br />
<strong>ω</strong><br />
= tanθ<br />
L(1),<br />
I + I tanθ<br />
= I tanθ L(2)<br />
[ − (1) × tanθ<br />
+ (2)]<br />
2 tanθ<br />
tan 2θ<br />
= =<br />
2<br />
1−<br />
tan θ I<br />
If<br />
I<br />
I<br />
xx<br />
xy<br />
yy<br />
→ tan 2θ<br />
= ∞<br />
= 0 → tan 2θ<br />
= 0<br />
2I<br />
xx<br />
xy<br />
− I<br />
xy<br />
→ ( I<br />
yy<br />
∴45<br />
yy<br />
yy<br />
yy<br />
o<br />
o o<br />
∴0<br />
, 90<br />
y<br />
− I<br />
,135<br />
x<br />
xx<br />
o<br />
1<br />
y<br />
1<br />
) tanθ<br />
= I<br />
y<br />
2<br />
(예9.1)<br />
xy<br />
o<br />
135<br />
(tan<br />
y<br />
2<br />
θ −1)<br />
1<br />
o<br />
45<br />
x<br />
x