
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>경상대학교</strong> 물리학과 김현수<br />
9-8<br />
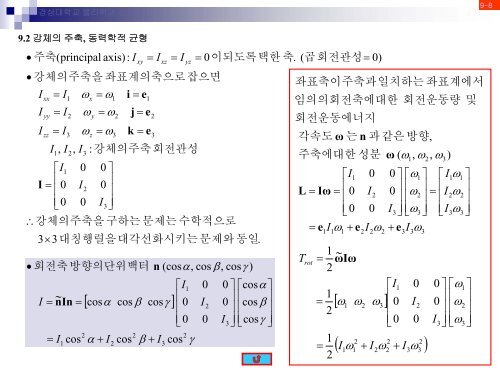
9.2 강체의 주축, 동력학적 균형<br />
0)<br />
(<br />
.<br />
0<br />
axis):<br />
principal<br />
( =<br />
=<br />
=<br />
=<br />
• 회전관성<br />
곱<br />
이되도록택한 축<br />
주축<br />
yz<br />
xz<br />
xy<br />
I<br />
I<br />
I<br />
.<br />
3<br />
3<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
:<br />
,<br />
,<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
3<br />
3<br />
3<br />
2<br />
2<br />
2<br />
1<br />
1<br />
1<br />
대칭행렬을대각선화시키는 문제와 동일<br />
강체의주축을 구하는 문제는 수학적으로<br />
강체의주축회전관성<br />
강체의주축을 좌표계의축으로잡으면<br />
×<br />
∴<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
•<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
z<br />
zz<br />
y<br />
yy<br />
x<br />
xx<br />
I<br />
e<br />
k<br />
e<br />
j<br />
e<br />
i<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
[ ]<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
γ<br />
β<br />
α<br />
2<br />
3<br />
2<br />
2<br />
2<br />
1<br />
3<br />
2<br />
1<br />
cos<br />
cos<br />
cos<br />
cos<br />
cos<br />
cos<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
cos<br />
cos<br />
cos<br />
~<br />
)<br />
cos<br />
,<br />
cos<br />
,<br />
(cos<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
•<br />
nIn<br />
회전축방향의단위백터 n<br />
3<br />
3<br />
3<br />
2<br />
2<br />
2<br />
1<br />
1<br />
1<br />
3<br />
3<br />
2<br />
2<br />
1<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
)<br />
,<br />
,<br />
(<br />
,<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
e<br />
e<br />
e<br />
I<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
n<br />
<strong>ω</strong><br />
+<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
=<br />
주축에대한 성분<br />
과같은 방향<br />
는<br />
각속도<br />
회전운동에너지<br />
임의의회전축에대한 회전운동량 및<br />
좌표축이주축과일치하는 좌표계에서<br />
[ ]<br />
( )<br />
2<br />
3<br />
3<br />
2<br />
2<br />
2<br />
2<br />
1<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
2<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
1<br />
~<br />
2<br />
1<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
T rot +<br />
+<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
= I<strong>ω</strong><br />
<strong>ω</strong>