
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>경상대학교</strong> 물리학과 김현수<br />
9-13<br />
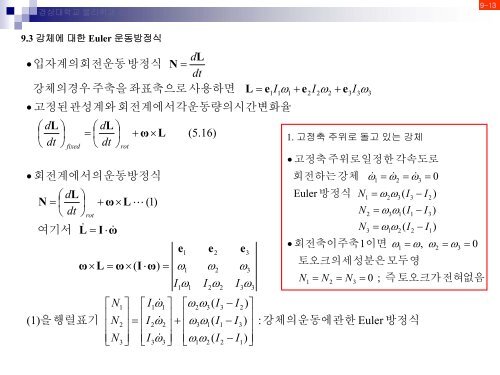
9.3 강체에 대한 Euler 운동방정식<br />
(5.16)<br />
3<br />
3<br />
3<br />
2<br />
2<br />
2<br />
1<br />
1<br />
1<br />
L<br />
<strong>ω</strong><br />
L<br />
L<br />
e<br />
e<br />
e<br />
L<br />
L<br />
N<br />
×<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
•<br />
+<br />
+<br />
=<br />
=<br />
•<br />
rot<br />
fixed<br />
dt<br />
d<br />
dt<br />
d<br />
I<br />
I<br />
I<br />
dt<br />
d<br />
고정된관성계와 회전계에서각운동량의시간변화율<br />
강체의경우 주축을 좌표축으로 사용하면<br />
입자계의회전운동방정식<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
1. 고정축 주위로 돌고 있는 강체<br />
즉 토오크가전혀없음<br />
토오크의세성분은 모두영<br />
이면<br />
회전축이주축<br />
방정식<br />
회전하는강체<br />
고정축 주위로일정한 각속도로<br />
;<br />
0<br />
0<br />
,<br />
1<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
Euler<br />
0<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
1<br />
2<br />
2<br />
1<br />
3<br />
3<br />
1<br />
1<br />
3<br />
2<br />
2<br />
3<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
=<br />
=<br />
=<br />
=<br />
=<br />
=<br />
•<br />
−<br />
=<br />
−<br />
=<br />
−<br />
=<br />
=<br />
=<br />
=<br />
•<br />
N<br />
N<br />
N<br />
I<br />
I<br />
N<br />
I<br />
I<br />
N<br />
I<br />
I<br />
N<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
&<br />
&<br />
&<br />
방정식<br />
강체의운동에관한<br />
을행렬표기<br />
여기서<br />
회전계에서의운동방정식<br />
Euler<br />
:<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
(1)<br />
)<br />
(<br />
(1)<br />
1<br />
2<br />
2<br />
1<br />
3<br />
1<br />
1<br />
3<br />
2<br />
3<br />
3<br />
2<br />
3<br />
3<br />
2<br />
2<br />
1<br />
1<br />
3<br />
2<br />
1<br />
3<br />
3<br />
2<br />
2<br />
1<br />
1<br />
3<br />
2<br />
1<br />
3<br />
2<br />
1<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
−<br />
−<br />
+<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⋅<br />
×<br />
=<br />
×<br />
⋅<br />
=<br />
×<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
=<br />
•<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
N<br />
N<br />
N<br />
I<br />
I<br />
I<br />
dt<br />
d<br />
rot<br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong> <strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
<strong>ω</strong><br />
&<br />
&<br />
&<br />
&<br />
&<br />
L<br />
e<br />
e<br />
e<br />
<strong>ω</strong><br />
I<br />
<strong>ω</strong><br />
L<br />
<strong>ω</strong><br />
<strong>ω</strong><br />
I<br />
L<br />
L<br />
<strong>ω</strong><br />
L<br />
N