1 - Signal Processing Systems
1 - Signal Processing Systems
1 - Signal Processing Systems

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Hoofdstuk 1<br />
<strong>Signal</strong>en en systemen in de discrete tijd<br />
1.1 Tijddiscrete signalen<br />
Een tijddiscreet signaal Ò℄ is een rij van waarden, gedefinieerd voor gehele (discrete) waarden van<br />
Ò. Zo’n signaal verkrijgen we bijv. wanneer we iedere 10 min. een temperatuurmeting uitvoeren en<br />
de meetwaarden noteren. Indien we het tijdcontinue verloop van de temperatuur aanduiden met ´Øµ<br />
dan is Ò℄ de bemonstering van dit continue signaal waarvoor geldt Ò℄ ´ÒÌ µ. Hetbemonsteringsinterval<br />
Ì is dan gelijk aan 10 min..<br />
De nummering Ò kan dus samenhangen met de tijd, maar kan ook samenhangen met een andere<br />
variabele zoals bijv. de plaats, de frequentie of de rentestand. Voor het gemak zullen we, tenzij anders<br />
vermeld wordt, Ò als een discrete tijdvariabele beschouwen.<br />
Het tijdcontinue signaal ´Øµ wordt een analoog signaal genoemd terwijl het tijddiscrete signaal Ò℄<br />
kortheidshalve als een discreet signaal wordt aangeduid.<br />
De waarden Ò℄ kunnen worden omgezet in getallen zodat ze digitaal kunnen worden bewerkt; in dat<br />
geval noemen we Ò℄ een digitaal signaal.<br />
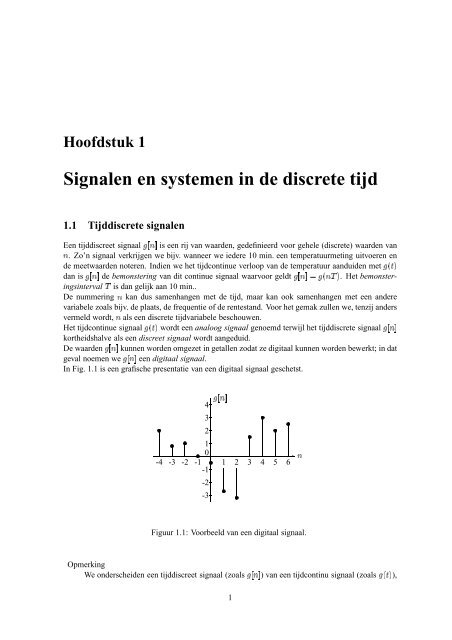
In Fig. 1.1 is een grafische presentatie van een digitaal signaal geschetst.<br />
Ø<br />
Ø Ø<br />
Ò℄<br />
4<br />
3<br />
2<br />
1<br />
Ø 0<br />
¹ Ò<br />
-4 -3 -2 -1 Ø 1 2 3 4 5 6<br />
-1<br />
-2<br />
-3<br />
Ø<br />
Ø<br />
Ø<br />
Ø<br />
Ø<br />
Ø<br />
Figuur 1.1: Voorbeeld van een digitaal signaal.<br />
Opmerking<br />
We onderscheiden een tijddiscreet signaal (zoals Ò℄) van een tijdcontinu signaal (zoals ´Øµ),<br />
1
2 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
door bij tijddiscrete signalen met rechte haken ‘[ ]’ te werken terwijl we bij tijdcontinue signalen<br />
kromme haken ‘( )’ gebruiken. Dit onderscheid maakt het mogelijk om hetzelfde grondsymbool<br />
voor de twee (verschillende) functies Ò℄ en ´Øµ te gebruiken.<br />
Enkele speciale tijddiscrete signalen zijn de eenheidsimpuls, de eenheidsstap en het sinusoïdale signaal;<br />
de definities van deze signalen zijn hieronder gegeven.<br />
1<br />
×<br />
ÆÒ℄<br />
Eenheidsimpuls : ÆÒ℄ <br />
´<br />
½ voor Ò ¼<br />
¼ voor Ò ¼<br />
× × × ×<br />
× × × × × ×<br />
¹ Ò<br />
-4 -3 -2 -1 0 1 2 3 4 5 6<br />
Ò℄<br />
1× × × × × × ×<br />
Eenheidsstap : Ò℄ <br />
´<br />
½ voor Ò ¼<br />
¼ voor Ò¼<br />
× × × ×<br />
¹ Ò<br />
-4 -3 -2 -1 0 1 2 3 4 5 6<br />
×<br />
×<br />
×<br />
Sinusoïdaal signaal : Ò℄ ×Ò´Ò · µ ¹ Ò<br />
×<br />
× ×<br />
×<br />
×<br />
×<br />
×<br />
×<br />
N.B.<br />
Een sinusoïdaal signaal is in het algemeen niet periodiek; het is slechts periodiek als de verhouding<br />
rationaal is.<br />
1.2 Het bewerken van tijdcontinue signalen met behulp van digitale<br />
systemen<br />
Een analoog signaal ܴص kan door een analoog (tijdcontinu) systeem worden bewerkt en zo worden<br />
omgezet in een (analoog) uitgangssignaal ݴص; het ‘bewerkende’ systeem noemen we een overdrachtssysteem<br />
ܴص ݴص. We beschouwen slechts lineaire systemen. Het analoge systeem is<br />
dan opgebouwd uit geheugenvrije elementen (zoals weerstanden en transistoren) plus elementen met<br />
geheugen (spoelen en condensatoren); het opnemen van elementen met geheugen zorgt ervoor dat het<br />
systeem frequentieafhankelijk wordt.<br />
Het is echter ook mogelijk om de signaalbewerking ܴص ݴص m.b.v. digitale middelen (digitale<br />
signaalbewerking) te doen. In Fig. 1.2 en op de omslag van dit dictaat is aangegeven welke weg het<br />
signaal daarvoor moet doorlopen.<br />
Het analoge signaal ܴص (spanning of stroom) wordt eerst bemonsterd door op equidistante tijdstippen<br />
dit signaal te meten (bemonsteren) en de meetwaarden via een analoog-digitaal (A/D) omzetter om<br />
te zetten in digitale meetwaarden: ÜÒ℄ Ü´ÒÌ µ.
1.3. De elementen van een digitaal filter 3<br />
Elektrisch<br />
analoog<br />
systeem<br />
Elektrisch<br />
analoog<br />
systeem<br />
ܴص<br />
ݴص<br />
<br />
<br />
Bemonsteren<br />
<br />
Ì<br />
Interpolatie<br />
<br />
Omzetten<br />
in<br />
getallen<br />
ÜÒ℄ ¹ Digitaal<br />
filter<br />
ÝÒ℄<br />
Omzetten van<br />
getallen in<br />
elektrisch<br />
signaal<br />
<br />
Figuur 1.2: Signaalbewerking met digitale middelen.<br />
Het digitale filter wordt nu geëxciteerd door het digitale ingangssignaal ÜÒ℄; het berekent voor iedere<br />
opeenvolgende Ò een nieuwe waarde voor het digitale uitgangssignaal ÝÒ℄ en vormt zo een (digitaal)<br />
overdrachtssysteem ÜÒ℄ ÝÒ℄. Het signaal ÝÒ℄ is dan de ‘bewerkte’ versie van het signaal ÜÒ℄.<br />
De opeenvolgende getallen ÝÒ℄ worden daarna in een digitaal-analoog (D/A) omzetter omgezet in<br />
een elektrisch signaal (spanning of stroom). Omdat er steeds een tijdinterval Ì verloopt tussen de<br />
opeenvolgende waarden van ÝÒ℄ zal het hieruit volgende elektrische signaal sprongsgewijs verlopen.<br />
Een elektrisch (tijdcontinu) interpolatiefilter heeft daarom de taak om het elektrisch signaal ‘glad’ en<br />
continu te laten verlopen.<br />
Uiteindelijk verkrijgen we dan het analoge elektrische uitgangssignaal ݴص dat een ‘bewerkte’ versie<br />
is van het analoge ingangssignaal ܴص.<br />
Opmerking<br />
In een digitaal filter kunnen slechts getallen met een eindige woordlengte bewerkt worden;<br />
daarom is kwantisering nodig. De ongewenste effecten van deze kwantisering zullen we in<br />
Hfdst. 5 beschouwen.<br />
1.3 De elementen van een digitaal filter<br />
We beschouwen voorlopig digitale filters die opgebouwd zijn uit een drietal lineaire elementen: de<br />
opteller, devermenigvuldiger en de vertrager (ofwel geheugenelement); de symbolen en de definities<br />
voor deze elementen zijn in Fig. 1.3 gegeven.<br />
De vermenigvuldigingsfactor « is constant en reëel.<br />
We zullen zien dat door het opnemen van geheugenelementen, frequentieafhankelijke filters kunnen<br />
worden gerealiseerd.
4 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
½ Ò℄<br />
¾ Ò℄<br />
Ê·<br />
<br />
½ Ò℄· ¾ Ò℄<br />
¹<br />
Ò℄ «Ò℄<br />
¹ « ¹<br />
Ò℄<br />
¹<br />
Ò ½℄<br />
¹<br />
Figuur 1.3: De lineaire elementen van digitale filters: van links naar rechts de opteller, de vermenigvuldiger<br />
en de vertrager.<br />
Overigens zullen we later ook andere elementen in beschouwing nemen, zoals de kwantisator, de<br />
bemonsteringfrequentie-verlager en -verhoger.<br />
Een digitaal filter is een overdrachtssysteem dat is opgebouwd uit een eindig aantal elementen. Het<br />
systeem wordt geëxciteerd door één ingangssignaal ÜÒ℄ en we beschouwen één signaal ÝÒ℄ als<br />
het uitgangssignaal (de responsie) van het systeem. In Fig. 1.4 is een algemeen filter schetsmatig<br />
weergeven.<br />
ÜÒ℄<br />
Ê ·<br />
ÝÒ℄<br />
¹ ¹ ¹ « ¹ ¹ ¹ ¹<br />
<br />
Figuur 1.4: Het digitale filter als black box.<br />
1.4 De toestandsbeschrijving van het systeem<br />
In Fig. 1.5 is het algemene systeem opnieuw getekend; nu zijn echter slechts de optellers en vermenigvuldigers<br />
in een ‘black box’ getekend terwijl, behalve het ingangs- en uitgangssignaal, de vertragers<br />
uitwendig aan de box zijn aangesloten.<br />
ÜÒ℄<br />
Ê ·<br />
ÝÒ℄<br />
¹ ¹ ¹ « ¹<br />
¹<br />
<br />
¹ <br />
× ½Ò ·½℄ × ½Ò℄<br />
¹ <br />
× ¾Ò·½℄ × ¾Ò℄<br />
¡¡¡ ¹ <br />
× ÄÒ·½℄ × ÄÒ℄<br />
Figuur 1.5: Het digitale filter als black box met naar buiten gevoerde geheugenelementen.<br />
De box ontvangt een aantal signalen aan zijn ingangen (ÜÒ℄, × ½ Ò℄, × ¾ Ò℄ ¡¡¡× Ä Ò℄), combineert<br />
deze signalen op een lineaire manier en vormt zo de van de box uitgaande signalen (ÝÒ℄, × ½ Ò ·½℄,<br />
× ¾ Ò·½℄¡¡¡× Ä Ò·½℄).
1.5. De eigenfunctie Þ Ò van het systeem 5<br />
Op een bepaald moment Ò ¼ wordt het ingangssignaal ÜÒ ¼ ℄ aan de box aangeboden terwijl de<br />
geheugenelementen de waarden × ½ Ò ¼ ℄, × ¾ Ò ¼ ℄ ¡¡¡× Ä Ò ¼ ℄hebben; hiervan uitgaand berekent de box<br />
dan de waarde ÝÒ ¼ ℄ van het uitgangssignaal en ook de nieuwe inhouden van de geheugenelementen<br />
(× ½ Ò ¼ ·½℄, × ¾ Ò ¼·½℄¡¡¡× Ä Ò ¼·½℄). Daarna staat het systeem klaar om de volgende waarde van<br />
het ingangssignaal te ontvangen en opnieuw de berekeningen uit te voeren; enz. enz.<br />
De uit de box komende signalen worden berekend door de ingaande signalen te combineren m.b.v. de<br />
operaties ‘optellen’ en ‘vermenigvuldigen met constanten’. Ieder uitgaand signaal is dus een lineaire<br />
combinatie van de ingaande signalen. De vergelijkingen zullen daarom de volgende vorm hebben:<br />
ÝÒ℄ ½ × ½ Ò℄· ¾ × ¾ Ò℄·¡¡¡· Ä × Ä Ò℄·ÜÒ℄<br />
× ½ Ò ·½℄ ½½ × ½ Ò℄· ½¾ × ¾ Ò℄·¡¡¡· ½Ä × Ä Ò℄· ½ ÜÒ℄<br />
× ¾ Ò·½℄ ¾½ × ½ Ò℄· ¾¾ × ¾ Ò℄·¡¡¡· ¾Ä × Ä Ò℄· ¾ ÜÒ℄<br />
.<br />
.<br />
. (1.1)<br />
× Ä Ò ·½℄ Ľ × ½ Ò℄· ľ × ¾ Ò℄·¡¡¡· ÄÄ × Ä Ò℄· Ä ÜÒ℄<br />
In matrixnotatie noteren we deze vergelijkingen als:<br />
met<br />
ÝÒ℄ ×Ò℄·ÜÒ℄ en ×Ò ·½℄×Ò℄·ÜÒ℄ (1.2)<br />
<br />
¾<br />
<br />
<br />
¿<br />
½½ ½¾ ¡¡¡ ½Ä<br />
¾½ ¾¾ ¡¡¡ ¾Ä<br />
<br />
. . .<br />
Ľ ľ ¡¡¡ ÄÄ<br />
¾<br />
<br />
<br />
¿<br />
½<br />
¾<br />
<br />
.<br />
Ä<br />
½ ¾ ¡¡¡ Ä ℄ en ×Ò℄ <br />
¾<br />
<br />
<br />
× ½ Ò℄<br />
× ¾ Ò℄<br />
.<br />
× Ä Ò℄<br />
De parameters ½½ ¡¡¡ ÄÄ ½ ¡¡¡ Ä ½ ¡¡¡ Ä en (en daarmee ook de waarden van de matrix <br />
en van de vectoren en ) worden bepaald door de structuur van het systeem en door de waarden<br />
van de vermenigvuldigers.<br />
De variabelen × ½ Ò℄, × ¾ Ò℄ ¡¡¡× Ä Ò℄ heten de toestandsvariabelen (Engels: state variables); zij zijn<br />
veroorzaakt door het verleden van het signaalverloop, zijn opgeslagen in de geheugenelementen en<br />
bepalen tezamen met het ingangssignaal ÜÒ℄, het toekomstige verloop van de variabelen. De vergelijkingen<br />
(1.1) en (1.2) heten de toestandsvergelijkingen en de vector ×Ò℄ heet de toestandsvector.<br />
Verg. (1.1) en (1.2) zeggen dus: uit het ingangssignaal en de toestand op een bepaald moment volgt<br />
(d.m.v. lineaire combinatie) ten eerste het uitgangssignaal en ten tweede de volgende toestand van het<br />
systeem.<br />
Indien de toestand ×Ò ¼ ℄ op een bepaald moment Ò ¼ bekend is en het ingangssignaal ÜÒ℄ bekend is<br />
vanaf dat moment Ò ¼ , kan m.b.v. verg. (1.1) de toestand en het uitgangssignaal voor Ò Ò ¼ achtereenvolgens<br />
worden bepaald:<br />
¿<br />
<br />
<br />
ÝÒ ¼ ℄×Ò ¼ ℄·ÜÒ ¼ ℄×Ò ¼ ·½℄×Ò ¼ ℄·ÜÒ ¼ ℄<br />
ÝÒ ¼·½℄×Ò ¼·½℄·ÜÒ ¼ ·½℄×Ò ¼·¾℄×Ò ¼ ·½℄·ÜÒ ¼·½℄<br />
ÝÒ ¼·¾℄×Ò ¼·¾℄·ÜÒ ¼ ·¾℄×Ò ¼·¿℄×Ò ¼ ·¾℄·ÜÒ ¼·¾℄<br />
Voorbeeld 1.4.1 Ga na dat voor de schakeling van Fig. 1.6 geldt<br />
¾<br />
<br />
¿<br />
<br />
×Ò ·½℄ · ¼ ½<br />
¼ ¼ ×Ò℄·<br />
´ · µ ½ <br />
¾<br />
<br />
½ ¼<br />
<br />
¿<br />
<br />
ÜÒ℄<br />
en ÝÒ℄ ´·µ´ · µ ´ · µ℄ ×Ò℄·´· µÜÒ℄.<br />
<br />
enz. enz.
6 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
¹ <br />
¹ <br />
¹ <br />
·<br />
<br />
¹ ÝÒ℄<br />
ÜÒ℄<br />
¹ · ¹ × ½ Ò℄<br />
¹ ¹ × ¾ Ò℄¹ · ¹ × ¿ Ò℄¹ ·<br />
Á<br />
<br />
<br />
<br />
¹ <br />
Figuur 1.6: Voorbeeld.<br />
1.5 De eigenfunctie Þ Ò van het systeem<br />
Voor de tijdcontinue lineaire tijdonafhankelijke overdrachtssystemen is het signaal ×Ø een eigenfunctie;<br />
het rekenen met deze signalen is eenvoudig en is van voordeel om de algemene systeemeigenschappen<br />
te beschrijven.<br />
Bij de nu beschouwde tijddiscrete systemen zoeken we ook naar zulke eigenfuncties, d.w.z. naar<br />
functies ÕÒ℄ die onvervormd door het systeem worden doorgegeven. Met ‘onvervormd’ bedoelen we<br />
dat indien het ingangssignaal gelijk is aan ÜÒ℄ ÕÒ℄, het uitgangssignaal slechts een factor scheelt<br />
met het ingangssignaal: ÝÒ℄ factor ¢ ÕÒ℄.<br />
We beschouwen eerst een eenvoudig systeem dat slechts uit één vertrager bestaat en proberen een<br />
eigenfunctie ÕÒ℄ van dit systeem te vinden.<br />
Voor de vertrager met ingangssignaal ÕÒ℄ is het uitgangssignaal gelijk aan ÕÒ ½℄; zie linkerhelft<br />
van Fig. 1.7. Indien ÕÒ℄ een eigenfunctie is moeten ingangs- en uitgangssignaal evenredig aan elkaar<br />
zijn d.w.z. ÕÒ℄ ÞÕÒ ½℄ ofwel ÕÒ ½℄ Þ ½ ÕÒ℄. Dan geldt dus<br />
ÕÒ℄ ÞÕÒ ½℄ Þ ¾ ÕÒ ¾℄ Þ ¿ ÕÒ ¿℄ ¡¡¡ Þ Ò Õ¼℄ ¡¡¡<br />
waaruit we concluderen dat de eigenfunctie ÕÒ℄ een meetkundige rij is met een willekeurig reden Þ:<br />
ÕÒ℄ Õ¼℄Þ Ò <br />
ÕÒ℄<br />
¹ ÕÒ ¹<br />
½℄ Þ Ò ¹ Þ<br />
Þ ½ ¹<br />
Ò ½<br />
Figuur 1.7: Symbolen voor de vertrager.<br />
In de rechterhelft van Fig. 1.7 is de tijdvertrager nogmaals getekend met een ingangssignaal Þ Ò<br />
(meetkundige rij met reden Þ en amplitude ); het uitgangssignaal is dan gelijk aan Þ Ò ½ <br />
Þ ½ Þ Ò (meetkundige rij met reden Þ en amplitude Þ ½ ). De vertrager vermenigvuldigt een ingangssignaal<br />
dat evenredig met een meetkundige rij Þ Ò verloopt dus met de factor Þ ½ . Het is daarom<br />
gebruikelijk om de vertrager aan te duiden met het symbool Þ ½ , zoals dit ook in de figuur is gebeurd.
1.6. Het overdrachtssysteem, de overdrachtsfunctie en de differentievergelijking 7<br />
We testen nu of de meetkundige rij ook een eigenfunctie is van het algemene tijddiscrete systeem<br />
door na te gaan of, wanneer het ingangssignaal volgens ÜÒ℄ Þ Ò verloopt, de vergelijkingen<br />
oplosbaar zijn indien we ervan uit gaan dat alle signalen in het systeem evenredig met Þ Ò verlopen.<br />
We substitueren daartoe de signaalverlopen<br />
ÜÒ℄ Þ Ò × ½ Ò℄Ë ½ Þ Ò × ¾ Ò℄Ë ¾ Þ Ò ¡¡¡ × Ä Ò℄Ë Ä Þ Ò en ÝÒ℄ Þ Ò<br />
in de toestandsvergelijkingen; dit leidt tot<br />
Ë ½ Þ Ò·½ ½½ Ë ½ Þ Ò · ½¾ Ë ¾ Þ Ò · ¡¡¡· ½Ä Ë Ä Þ Ò· ½ Þ Ò <br />
Ë ¾ Þ Ò·½ ¾½ Ë ½ Þ Ò · ¾¾ Ë ¾ Þ Ò · ¡¡¡· ¾Ä Ë Ä Þ Ò· ¾ Þ Ò <br />
.<br />
.<br />
.<br />
Ë Ä Þ Ò·½ Ľ Ë ½ Þ Ò · ľ Ë ¾ Þ Ò · ¡¡¡· ÄÄ Ë Ä Þ Ò · Ä Þ Ò en<br />
Þ Ò ½ Ë ½ Þ Ò· ¾ Ë ¾ Þ Ò·¡¡¡· Ä Ë Ä Þ Ò·Þ Ò <br />
De tijdafhankelijkheid Þ Ò kan uit al deze vergelijkingen worden weggedeeld waarna een vergelijkingsstelsel<br />
voor de amplitudes ( Ë ½ Ë ¾ ¡¡¡Ë Ä ) resulteert:<br />
´ ½½ ÞµË ½ · ½¾ Ë ¾ · ¡¡¡· ½Ä Ë Ä ½ <br />
¾½ Ë ½ ·´ ¾¾ ÞµË ¾ · ¡¡¡· ¾Ä Ë Ä ¾ <br />
.<br />
. .<br />
Ľ Ë ½ · ľ Ë ¾ · ¡¡¡·´ ÄÄ ÞµË Ä Ä en<br />
½ Ë ½ · ¾ Ë ¾ · ¡¡¡· Ä Ë Ä· <br />
Bij een gegeven amplitude van het ingangssignaal kunnen uit de eerste Ä vergelijkingen van (1.3)<br />
de Ä amplitudes Ë ½ Ë ¾ ¡¡¡Ë Ä van de toestandsvariabelen worden opgelost (eventueel met uitzondering<br />
van een eindig aantal Þ-waarden). Uit de laatste vergelijking volgt dan de amplitude van het<br />
uitgangssignaal . Het tijdverloop van alle signalen is daarmee bekend en gelijk aan (amplitude)¢Þ Ò .<br />
We concluderen hieruit dat Þ Ò inderdaad een eigenfunctie van het algemene systeem is.<br />
Het oplossen van de Ë ’s en leidt tot uitdrukkingen volgens Ë ´Þµ en À´Þµ. De<br />
evenredigheidsfactoren ´Þµ en À´Þµ zijn afhankelijk van de ’s, de ’s, de ’s en van (die door<br />
het systeem bepaald worden) en ook van de reden Þ (die uit verloop van het ingangssignaal volgt).<br />
Indien we (zoals gebruikelijk) uitgaan van een gegeven systeem, is slechts de reden Þ een variabele;<br />
daarom wordt slechts de Þ-afhankelijkheid expliciet in ´Þµ en À´Þµ aangeduid.<br />
De factor À´Þµ wordt de overdrachtsfunctie van het systeem genoemd.<br />
<br />
<br />
<br />
(1.3)<br />
1.6 Het overdrachtssysteem ÜÒ℄ <br />
en de differentievergelijking<br />
ÝÒ℄, de overdrachtsfunctie À ´Þµ<br />
Indien we een systeem als overdrachtssysteem ÜÒ℄ ÝÒ℄ beschouwen zijn we slechts geïnteresseerd<br />
in de relatie tussen het ingangssignaal (de excitatie) ÜÒ℄ en het uitgangssignaal (de responsie)<br />
ÝÒ℄ en niet in de inwendige signalen van het systeem (de toestandsvariabelen). In de vorige paragraaf<br />
introduceerden we de beschrijving van het overdrachtssysteem m.b.v. zijn overdrachtsfunctie À´Þµ;<br />
samengevat betekent dit<br />
ÜÒ℄ Þ Ò<br />
ÝÒ℄À´ÞµÞ Ò Þ Ò met À´Þµ<br />
De overdrachtsfunctie À´Þµ is dus de factor waarmee het systeem de amplitude van het ingangssignaal<br />
vermenigvuldigt. Deze factor hangt af van de structuur van het systeem, van de vermenigvuldigers<br />
en van de reden Þ van het ingangssignaal.
8 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
Opmerking<br />
Bij een analoog lineair en tijdonafhankelijk systeem is het signaalverloop ×Ø een eigenfunctie<br />
van het systeem. Een ingangssignaal ܴص ×Ø veroorzaakt daarom (in de stationaire<br />
toestand) een uitgangssignaal ݴص ×Ø en de amplitudes en hangen samen volgens<br />
À ´×µ waarbij À ´×µ de overdrachtsfunctie van het (analoge) tijdcontinue systeem is.<br />
We zien dus de overeenkomst tussen de verschijnselen in de continue en de discrete tijd. In de<br />
discrete tijd wordt de rol van het exponentiële verloop ×Ø overgenomen door de meetkundige<br />
rij Þ Ò die daarmee de tijddiscrete tegenhanger is van een exponentieel signaal. De samenhang<br />
tussen deze twee signaalverlopen wordt duidelijker indien we bedenken dat bemonstering<br />
van een exponentieel signaal ܴص ×Ø volgens ÜÒ℄ Ü´ÒÌ µ een meetkundige rij<br />
ÜÒ℄ ×ÒÌ ´ ×Ì µÒ Þ Ò oplevert, met Þ ×Ì . De meetkundige rij Þ Ò zullen we daarom<br />
ook een exponentieel signaal noemen.<br />
We bekijken nu opnieuw het elementaire vergelijkingsstelsel (1.1) en bepalen hiervan uitgaande de<br />
vergelijking die het verband tussen ÜÒ℄ en ÝÒ℄ beschrijft. Hiervoor moeten de interne signalen<br />
(× Ò℄) uit het stelsel worden geëlimineerd. Dan blijkt dat het verband tussen ÜÒ℄ en ÝÒ℄ gegeven<br />
wordt door<br />
ÝÒ℄ ¬ ¼ ÜÒ℄·¬ ½ ÜÒ ½℄ · ¬ ¾ ÜÒ ¾℄ · ¡¡¡·¬ Ä ÜÒ Ä℄<br />
<br />
·« ½ ÝÒ ½℄ · « ¾ ÝÒ ¾℄ · ¡¡¡·« Ä ÝÒ Ä℄<br />
Ä<br />
¼<br />
¬ ÜÒ ℄·<br />
Ä<br />
½<br />
« ÝÒ ℄ (1.4)<br />
Deze vergelijking heet de differentievergelijking (de D.V.) van het systeem en is de tijddiscrete tegenhanger<br />
van de differentiaalvergelijking van een analoog systeem.<br />
Bewijs.<br />
De gedetailleerde afleiding van de D.V. uit de toestandsvergelijkingen (1.1) laten we achterwege; we<br />
geven slechts het verloop van deze afleiding aan.<br />
Eerst herschrijven we de toestandsvergelijkingen als<br />
×Ò℄ ×Ò ½℄ · ÜÒ ½℄ en ÝÒ℄ ×Ò℄·ÜÒ℄<br />
Uit dit stelsel van Ä ·½ vergelijkingen willen we × ½ Ò℄, × ¾ Ò℄ ¡¡¡× Ä Ò℄ en × ½ Ò ½℄, × ¾ Ò<br />
½℄ ¡¡¡× Ä Ò ½℄, d.w.z. ¾Ä variabelen elimineren; we hebben hiervoor Ä vergelijkingen te weinig.<br />
Eenmaal ‘vertragen’ van het stelsel levert de Ä ·½nieuwe vergelijkingen<br />
×Ò ½℄ ×Ò ¾℄ · ÜÒ ¾℄ en ÝÒ ½℄ ×Ò ½℄ · ÜÒ ½℄<br />
er zijn echter ook Ä te elimineren variabelen bijgekomen (× ½ Ò ¾℄× ¾ Ò ¾℄ ¡¡¡× Ä Ò ¾℄). Ook<br />
komen de extra variabelen ÝÒ ½℄ en ÜÒ ½℄ voor. Wanneer we doorgaan tot en met de Ä¢<br />
vertraagde versie van het stelsel hebben we in het totaal ´Ä ·½µ ¾ vergelijkingen. In het totaal zijn er<br />
dan ´Ä ·¾µÄvariabelen die we willen elimineren nl.<br />
× ½ Ò℄× ½ Ò ½℄ ¡¡¡× ½ Ò ½ Ä℄<br />
× ¾ Ò℄× ¾ Ò ½℄ ¡¡¡× ¾ Ò ½ Ä℄<br />
.<br />
× Ä Ò℄× Ä Ò ½℄ ¡¡¡× Ò ½ Ä℄<br />
.
1.6. Het overdrachtssysteem, de overdrachtsfunctie en de differentievergelijking 9<br />
Wat betreft Ü en Ý komen de variabelen<br />
ÜÒ℄ÜÒ ½℄ ¡¡¡ÜÒ Ä℄en ÝÒ℄ÝÒ ½℄ ¡¡¡ÝÒ Ä℄<br />
voor.<br />
Het elimineren van de Ä ¾ ·¾Ä ×-variabelen uit de Ä ¾ ·¾Ä·½ vergelijkingen leidt dan tot één<br />
vergelijking tussen de Ü- enÝ-variabelen; de algemene vorm van deze vergelijking is de in (1.4)<br />
gegeven D.V.<br />
¾<br />
De D.V. (1.4) kan als volgt gelezen worden:<br />
het uitgangssignaal op een bepaald moment ÝÒ℄ is een lineaire combinatie van<br />
– het ingangssignaal ÜÒ℄ op dat moment<br />
– vertragingen van het ingangssignaal ÜÒ℄ (waarden ÜÒ ℄ uit het verleden)<br />
– vertragingen van het uitgangssignaal ÝÒ℄ (waarden ÝÒ ℄ uit het verleden).<br />
Deze uitspraak weerspiegelt de causaliteit van het systeem.<br />
Omdat we weten dat Þ Ò een eigenfunctie van het systeem is en dus<br />
ÜÒ℄ Þ Ò<br />
ÝÒ℄À´ÞµÞ Ò Þ Ò met À´Þµ<br />
bepalen we opnieuw het verband tussen de amplitudes en , maar nu uitgaande van de D.V. (1.4).<br />
Daartoe substitueren we ÜÒ℄ Þ Ò en ÝÒ℄ Þ Ò in de D.V.; dit leidt tot<br />
ofwel<br />
Þ Ò ¬ ¼ Þ Ò ·¬ ½ Þ Ò ½ · ¬ ¾ Þ Ò ¾ ·¡¡¡¬ Ä Þ Ò Ä<br />
·« ½ Þ Ò ½·« ¾ Þ Ò ¾·¡¡¡·« Ä Þ Ò Ä<br />
½ « ½ Þ ½ « ¾ Þ ¾ ¡¡¡ « Ä Þ Ä Þ Ò ¬ ¼·¬ ½ Þ ½·¬ ¾ Þ ¾·¡¡¡·¬ Ä Þ Ä Þ Ò <br />
Voor de overdrachtsfunctie H(z) volgt hieruit<br />
À´Þµ ¬ ¼·¬ ½ Þ ½·¬ ¾ Þ ¾·¡¡¡·¬ È<br />
Ä Þ Ä Ä¼<br />
½ « ½ Þ ½ « ¾ Þ ¾ ¡¡¡ « Ä Þ Ä ¬ Þ<br />
È <br />
½ Ľ<br />
« Þ (1.5)<br />
<br />
We hebben nu dus twee beschrijvingen van het digitale overdrachtssysteem ÜÒ℄ ÝÒ℄;één m.b.v.<br />
de overdrachtsfunctie (1.5) en één m.b.v. de differentievergelijking (1.4). Merk op dat de coëfficiënten<br />
die in deze beschrijvingen voorkomen dezelfde zijn. Dit wil zeggen dat uit een gegeven D.V. direct<br />
de overdrachtsfunctie volgt en omgekeerd. Aangezien het in de praktijk eenvoudig is om de overdrachtsfunctie<br />
van een systeem te bepalen, zal het bepalen van de D.V. steeds gebeuren door eerst de<br />
overdrachtsfunctie À´Þµ te bepalen en, daarvan uitgaand, de D.V. op te schrijven.<br />
Wat betreft de coëfficiënten van de D.V. en van À´Þµ (« ’s en ¬ ’s), constateren we dat deze reëel en<br />
constant zijn. Dit komt omdat de in het systeem voorkomende vermenigvuldigers reële constanten<br />
zijn.<br />
Verder merken we op dat de indexering in (1.4) en (1.5) van 0 tot Ä loopt. Hierbij is Ä gelijk aan<br />
het aantal vertragers dat in het systeem voorkomt.<br />
Het is echter mogelijk dat één of meerdere van de coëfficiënten (« ’s en ¬ ’s) gelijk aan nul zijn. We<br />
willen ons niet beperken tot het geval dat ¬ ¼ ongelijk aan nul is, maar er expliciet rekening mee houden<br />
dat de ¬-coëfficiënten kunnen ‘beginnen’ met een index  ( ¼) ofwel¬ ¼ ¬ ½ ¡¡¡ ¬  ½ ¼<br />
en ¬ Â ¼.<br />
Ook brengen we in de notatie expliciet tot uiting dat de « ’s gelijk aan nul kunnen zijn voor Å<br />
(met Å Ä)ende¬ ’s gelijk aan nul kunnen zijn voor Æ(met Æ Ä).
10 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
De bovengrens van de indexering kan dus verschillend zijn voor de « ’s en voor de ¬ ’s; de bovengrens<br />
(Æ resp. Å) is echter maximaal gelijk aan het aantal vertragers (Ä) dat in het systeem voorkomt.<br />
Dit leidt dan tot de volgende notatie voor de D.V. en de overdrachtsfunctie À´Þµ:<br />
Æ<br />
Å<br />
È ÆÂ<br />
¬ Þ <br />
ÝÒ℄ ¬ ÜÒ ℄· « ÝÒ ℄ en À´Þµ È<br />
½ Ž<br />
« Þ (1.6)<br />
<br />
Â<br />
½<br />
Het is ook mogelijk om À´Þµ zodanig op te schrijven dat er slechts polynomen met positieve machten<br />
van Þ in teller en noemer voorkomen; enkele equivalente schrijfwijzen zijn dan<br />
À´Þµ Þ Å Æ<br />
Þ Å Æ<br />
È ÆÂ<br />
¬ Þ<br />
È Æ <br />
Ž<br />
« Þ Å ÞÅ Æ<br />
Þ Å<br />
È Æ Â<br />
¼<br />
Þ Å<br />
È Æ Â<br />
¼<br />
Þ Å<br />
¬ Â·Þ Æ Â <br />
È Å ½<br />
¼<br />
« Å Þ <br />
¬ Æ Þ<br />
È <br />
Ž<br />
« Þ (1.7)<br />
Å <br />
Ontbinden van het teller- en noemerpolynoom in factoren leidt tot de schrijfwijze<br />
À´Þµ ¬ Â Þ Å Æ É Æ Â<br />
½ ´Þ Þ µ<br />
É Å½´Þ Ô µ (1.8)<br />
In de laatste uitdrukking zijn Þ ’s de Æ Â nulpunten en de Ô ’s de Å polen van de overdrachtsfunctie<br />
À´Þµ, die niet in Þ ¼liggen.<br />
In de oorsprong (Þ ¼) kan zich een enkelvoudig nulpunt (als Å Æ ½), een meervoudig nulpunt<br />
(als Šƽ), een enkelvoudige pool (als Å Æ ½) of een meervoudige pool (als Å Æ<br />
½) bevinden.<br />
In verg. (1.8) zien we verder dat het gedrag van À´Þµ voor Þ ½gelijk is aan ¬ Â Þ Â . Omdat<br />
 ¼, betekent dit dat À´Þµ voor Þ ½een eindige waarde ¬ ¼ heeft (voor  ¼)ofdatÀ´Þµ<br />
gelijk aan ¼ wordt (voor ¼). Anders gezegd: de graad van de teller van À´Þµ (als polynoom in Þ)<br />
is nooit groter dan die van de noemer.<br />
Onder de orde van een systeem verstaan we de waarde van Æ of Å naargelang welke van de twee<br />
waarden de grootste is: orde ÑÜ´ÅƵ. Aangezien beide waarden maximaal gelijk zijn aan<br />
het aantal aanwezige vertragers (Ä) is de orde dus maximaal gelijk aan dat aantal vertragers. In de<br />
praktijk zal de orde echter altijd gelijk zijn aan het aantal vertragers d.w.z. Ä ÑÜ´ÅƵ. Inde<br />
praktijk is dus òf Å òf Æ (of beiden) gelijk aan Ä.<br />
Voorbeeld 1.6.1 In het overdrachtssysteem Ü Ý van Fig. 1.8 zijn het ingangssignaal (), het uitgangssignaal<br />
( ) en twee interne signalen (Î en Ï ) aangeduid met hun amplitudes. Bij het rekenen<br />
aan deze schakeling gaan we er eerst van uit dat alle signalen verlopen volgens (amplitude)¢Þ Ò en<br />
berekenen de amplitude en de overdrachtsfunctie À´Þµ.<br />
Uit ÞÏ Î · ½ Ï volgt Ï <br />
Î<br />
Þ ½<br />
.<br />
Met ÞÎ · ¾ Ï · ¾Î<br />
Þ ½<br />
volgt Þ¾ ½ Þ ¾<br />
Þ ½<br />
Î ofwel Î Þ ½<br />
Þ ¾ ½ Þ ¾<br />
.<br />
½<br />
Dan is Ï <br />
Þ ¾ ½ Þ ¾<br />
.<br />
Het uitgangssignaal is dan gelijk aan<br />
½ Î · ¾ Ï ½Þ ½ ½ · ¾<br />
Þ ¾ ½ Þ ¾<br />
en de overdrachtsfunctie is<br />
À´Þµ ½Þ ½ ½· ¾<br />
Þ ¾ ½ Þ ¾<br />
À´Þµ<br />
½Þ ½·´ ¾ ½ ½ µÞ ¾<br />
<br />
½ ½ Þ ½ ¾ Þ ¾
1.6. Het overdrachtssysteem, de overdrachtsfunctie en de differentievergelijking 11<br />
¹<br />
½<br />
¹<br />
· ÞÎ ¹ Î<br />
Þ ½ ¹ ÞÏ · ¹<br />
<br />
<br />
Þ<br />
½<br />
½<br />
<br />
Ï ¹<br />
¾<br />
¹<br />
·<br />
<br />
¾<br />
<br />
Figuur 1.8: Voorbeeld.<br />
Wanneer we nu de gelijkheid<br />
Ó<br />
Ó<br />
Ò½ ½ Þ ½ ¾ Þ ¾ <br />
Ò ½ Þ ½ ·´ ¾ ½ ½ µÞ ¾ <br />
beschouwen, en ons realiseren dat de ‘operatie’ Þ ½ (populair gezegd) overeenkomt met eenmaal<br />
vertragen, Þ ¾ met twee maal vertragen etc., herkennen we direct de differentievergelijking<br />
<br />
ÝÒ℄ ½ ÝÒ ½℄ ¾ ÝÒ ¾℄ ½ ÜÒ ½℄·´ ¾ ½ ½ µÜÒ ¾℄<br />
We beëindigen deze paragraaf met het noemen van vier fundamentele eigenschappen van het<br />
beschouwde overdrachtssysteem en wel het reëel zijn, het causaal zijn, het tijdinvariant zijn en het<br />
lineair zijn van de signaaloverdracht ÜÒ℄ ÝÒ℄. Deze eigenschappen volgen direct uit het feit dat<br />
het systeem beschreven wordt met een D.V. volgens (1.4) waarbij de coëfficiënten (« ’s en ¬ ’s) reëel<br />
en constant zijn.<br />
Het systeem is reëel, dit betekent: indien het ingangssignaal ÜÒ℄ reëel is, dan is ook het uitgangssignaal<br />
ÝÒ℄ reëel.<br />
Het systeem is causaal, dit betekent: indien twee ingangssignalen Ü ½ Ò℄ en Ü ¾ Ò℄ gelijk aan elkaar<br />
zijn tot een bepaald moment Ò ¼ (Ü ½ Ò℄ Ü ¾ Ò℄voor ÒÒ ¼ ), zijn ook de bijbehorende responsies<br />
gelijk aan elkaar tot het moment Ò ¼ (Ý ½ Ò℄ Ý ¾ Ò℄voor ÒÒ ¼ ). Deze eigenschap volgt<br />
uit de D.V. (1.4) omdat een uitgangssignaal op een zeker moment niet bepaald wordt door de<br />
toekomst van in- of uitgangssignaal maar slechts door het verleden. Het systeem bevat immers<br />
slechts vertragers, geen ‘versnellers’.<br />
Het systeem is tijdinvariant (tijdonafhankelijk), dit betekent: als ÜÒ℄ ÝÒ℄ dan geldt ÜÒ<br />
Ò ¼ ℄ ÝÒ Ò ¼ ℄. Een tijdverschuiving van het ingangssignaal resulteert dus in eenzelfde<br />
tijdverschuiving van het uitgangssignaal. Deze eigenschap volgt uit het feit dat de coëfficiënten<br />
van de D.V. constant zijn.<br />
Het systeem is lineair, dit betekent: als Ü ½ Ò℄ Ý ½ Ò℄ en Ü ¾ Ò℄ Ý ¾ Ò℄ dan ½ Ü ½ Ò℄ ·<br />
¾ Ü ¾ Ò℄ ½ Ý ½ Ò℄· ¾ Ý ¾ Ò℄. Een lineaire combinatie van ingangssignalen resulteert dus<br />
in dezelfde lineaire combinatie van de respectieve uitgangssignalen. Verifieer zelf de juistheid<br />
van deze uitspraak door de signaalparen in de D.V. in te vullen.
12 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
We merken nog op dat deze eigenschap ook inhoudt dat een excitatie ÜÒ℄ ¼een responsie<br />
ÝÒ℄ ¼veroorzaakt ( ½ ¾ ¼); het systeem is dus ‘bronloos’ (bevat geen interne excitaties).<br />
Omdat een systeem, dat aan de D.V. (1.4) voldoet, causaal en bronloos is geldt nog: indien<br />
ÜÒ℄ ¼voor ÒÒ ¼ is ÝÒ℄ ¼voor ÒÒ ¼ (ga dit na). Er is dus geen uitgangssignaal<br />
voordat het ingangssignaal ‘begint’.<br />
1.7 De complexe rekenwijze voor sinusoïdale signalen<br />
In de praktijk bestaan er slechts reële signalen. Veelal is het echter handig om met complexe signalen<br />
te rekenen.<br />
Indien we een reëel lineair systeem beschouwen met twee reële excitaties Ü ½ Ò℄ en Ü ¾ Ò℄ zijn de<br />
bijbehorende responsies Ý ½ Ò℄ en Ý ¾ Ò℄ reëel, omdat het systeem reëel is. We kunnen echter ook (in<br />
gedachten) een complex ingangssignaal ÜÒ℄ beschouwen met ÜÒ℄ Ü ½ Ò℄·Ü ¾ Ò℄; vanwege de<br />
lineariteit zal dan de (complexe) responsie gelijk zijn aan ÝÒ℄ Ý ½ Ò℄·Ý ¾ Ò℄. De deelresponsies<br />
Ý ½ Ò℄ en Ý ¾ Ò℄ zijn hierbij reëel. We vinden derhalve de volgende eigenschap voor een reëel lineair<br />
systeem:<br />
als ÜÒ℄ ÝÒ℄ dan geldt Ê ÜÒ℄ Ê ÝÒ℄ en ÁÑ ÜÒ℄ ÁÑ ÝÒ℄<br />
Deze eigenschap vormt het uitgangspunt voor de complexe rekenwijze. In het hierna volgende werken<br />
we meestal met complexe signalen.<br />
Beschouw nu een reëel tijddiscreet sinusoïdaal ingangssignaal Ü Ö Ò℄ Ü Ñ Ó×´Ò · Ü µ. Om het<br />
rekenen gemakkelijker te maken, gebruiken we de complexe rekenwijze:<br />
Ü Ö Ò℄ Ê ÜÒ℄ met ÜÒ℄ Ò en Ü Ñ Ü <br />
Het signaal ÜÒ℄ is de complexe uitbreiding van de reële sinusoïde Ü Ö Ò℄. We zien dat ÜÒ℄ een<br />
meetkundige rij is met reden ; ÜÒ℄ verloopt dus zoals de signalen die we eerder beschouwden:<br />
ÜÒ℄ Þ Ò met Þ <br />
De hoek wordt de frequentie van het signaal genoemd en de factor de complexe amplitude van<br />
het signaal. Uit deze complexe amplitude volgt de amplitude Ü Ñ van de sinusoïde met Ü Ñ en<br />
de nulfase Ü van de sinusoïde met Ü Ö℄.<br />
Omdat we weten dat de responsie op het signaal ÜÒ℄ Þ Ò gelijk is aan ÝÒ℄ Þ Ò À´ÞµÞ Ò<br />
weten we ook dat de responsie op het (complexe) signaal ÜÒ℄ Ò gelijk is aan ÝÒ℄ Ò <br />
À´ µ Ò ; we hebben slechts Þ door vervangen. Uit de complexe responsie ÝÒ℄ volgt daarna<br />
de reële responsie Ý Ö Ò℄, volgens Ý Ö Ò℄ Ê ÝÒ℄. De complexe rekenwijze komt dus op het<br />
volgende neer:<br />
¯ ga van het reële ingangssignaal Ü Ö Ò℄ over op het complexe signaal ÜÒ℄ met<br />
Ü Ö Ò℄ Ü Ñ Ó×´Ò · Ü µ Ê Ò Ê ÜÒ℄ met Ü Ñ Ü <br />
¯ bepaal, m.b.v. de overdrachtsfunctie À´Þµ, het complexe uitgangssignaal ÝÒ℄<br />
ÜÒ℄ Ò ÝÒ℄ Ò met À´ µ
1.7. De complexe rekenwijze voor sinusoïdale signalen 13<br />
¯ en bepaal het reële uitgangssignaal Ý Ö Ò℄<br />
Ý Ö Ò℄ Ê ÝÒ℄ Ê Ò <br />
De reële responsie op uitgangssignaal is daarmee gelijk aan<br />
Ý Ö Ò℄ À´ µÜ Ñ Ó×´Ò · Ü · ÖÀ℄µ<br />
Ý Ñ Ó×´Ò · Ý µ met Ý Ñ À´ µÜ Ñ en Ý Ü · ÖÀ´ µ℄<br />
De functie À´ µ heet de frequentieresponsie van het systeem.<br />
De amplitudefactor À´ µ is de (frequentieafhankelijke) factor waarmee het systeem de amplitude<br />
van het ingangssignaal vermenigvuldigt.<br />
De faseverschuiving (of fasedraaiing) ÖÀ´ µ℄ geeft aan met welke (frequentieafhankelijke) hoek<br />
het systeem de fase van het ingangssignaal vermeerdert.<br />
N.B.<br />
De frequentieresponsie À´ µ is een periodieke functie van met een periode ¾. Eenvermeerdering<br />
van met een (geheel) aantal malen ¾ verandert de waarde van immers niet.<br />
Het is daarom gebruikelijk om het verloop van À´ µ, À´ µ en ÖÀ´ µ℄ slechts in één<br />
periode, met lengte ¾, te beschouwen; voor deze periode wordt meestal het gebied van ¼<br />
tot ¾of van tot ·genomen.<br />
Opmerking<br />
De complexe rekenwijze voor sinusoïdale signalen in tijddiscrete systemen is analoog aan<br />
die bij de tijdcontinue systemen. Wel zien we dat de rol van × uit het tijdcontinue<br />
overgenomen wordt door Þ . De rol die de imaginaire as (× ) inhet×-vlak heeft,<br />
wordt in het tijddiscrete dus door de eenheidscirkel (Þ )inhetÞ-vlak overgenomen.<br />
Voorbeeld 1.7.1 Beschouw een willekeurig tweede orde digitaal filter; dit heeft de overdrachtsfunctie<br />
À´Þµ ¼Þ ¾· ½ Þ· ¾<br />
¼ Þ ¾· ½ Þ· ¾<br />
en de frequentieresponsie<br />
À´ µ ¼ ¾ · ½ · ¾<br />
¼ ¾ · ½ · ¾<br />
<br />
Om de responsie op de sinusoïde Ü Ö Ò℄ Ü Ñ Ó×´Ò · Ü µ te bepalen moeten we À´ µ en<br />
ÖÀ´ µ℄ berekenen. Daarvoor herschrijven we À´ µ als<br />
dan volgt<br />
À´ µ ¼Ó×´¾µ·×Ò´¾µ · ½ Ó×´µ·×Ò´µ · ¾<br />
¼ Ó×´¾µ·×Ò´¾µ · ½ Ó×´µ·×Ò´µ · ¾<br />
<br />
×<br />
¼ Ó×´¾µ· ½ Ó×´µ· ¾ ¾· ¼ ×Ò´¾µ· ½ ×Ò´µ ¾<br />
en<br />
À´ µ <br />
<br />
Ö À´ µ<br />
¼ Ó×´¾µ· ½ Ó×´µ· ¾ ¾· ¼ ×Ò´¾µ· ½ ×Ò´µ ¾<br />
¼ ×Ò´¾µ· ½ ×Ò´µ<br />
atan<br />
¼ Ó×´¾µ· ½ Ó×´µ· ¾<br />
´· voor ¼ Ó×´¾µ· ½ Ó×´µ· ¾ ¼µ<br />
´· voor ¼ Ó×´¾µ· ½ Ó×´µ· ¾ ¼µ<br />
¼ ×Ò´¾µ· ½ ×Ò´µ<br />
atan<br />
¼ Ó×´¾µ· ½ Ó×´µ· ¾
14 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
De uitdrukking voor À´ µ kan vereenvoudigd worden door gebruik te maken van goniometrische<br />
relaties. Deze vereenvoudiging kan ook worden bereikt met een rekenmethode die we in de volgende<br />
paragraaf zullen behandelen.<br />
Indien we slechts geïnteresseerd zijn in de frequentieresponsie voor enkele speciale waarden van en<br />
niet in de complete frequentieafhankelijkheid, kunnen we deze gegeven waarden van natuurlijk ook<br />
rechtstreeks in À substitueren.<br />
Wanneer we bijv. slechts het gedrag voor ¾ willen bepalen substitueren we Þ ¾ direct<br />
in À´Þµ:<br />
Dan is<br />
en<br />
À´ ¾ µÀ´µ<br />
À <br />
×<br />
¾ ¼ ¾ · ¾ ½<br />
¾ ¼ ¾ · ¾ ½<br />
½<br />
ÖÀ℄ atan<br />
¾ ¼<br />
¼· ½ · ¾<br />
¼ · ½ · ¾<br />
<br />
´<br />
½<br />
atan<br />
¾ ¼<br />
· voor ¾ ¼ ¼<br />
· voor ¾ ¼ ¼<br />
Een zeer gemakkelijk te berekenen waarde van À is de waarde voor ¼ofwel Þ ½; À´½µ <br />
À´ ¼ µ beschrijft de overdracht voor een constant ingangssignaal (een ‘gelijkspanning’).<br />
<br />
1.8 De frequentieresponsie À ´ µ<br />
Voor de overdrachtsfunctie À´Þµ geldt de belangrijke spiegeleigenschap:<br />
À´Þ £ µÀ £´Þµ (1.9)<br />
Voor de frequentieresponsie À´ µ volgt hieruit<br />
À´ µÀ £´ µ en dus (1.10)<br />
À´ µ À´ µ en ÖÀ´ µ℄ ÖÀ´ µ℄<br />
De amplitudefactor À is dus een even functie van en de faseverschuiving ÖÀ℄ is een oneven<br />
functie van .<br />
Bewijs.<br />
De overdrachtsfunctie À´Þµ is het quotiënt van twee polynomen in Þ met reële coëfficiënten; zie<br />
verg. (1.7). Wanneer we nu Þ door Þ £ vervangen, zal een term Þ in teller of noemer van À´Þµ<br />
vervangen worden door ´Þ £ µ . Omdat de coëfficiënt reëel is geldt: ´Þ £ µ ´ Þ µ £ . Een<br />
vervanging van iedere term van de teller en de noemer door zijn complex toegevoegde, leidt tot de<br />
complex toegevoegde van het totale quotiënt en dus tot À´Þ £ µÀ £´Þµ.<br />
Voor Þ geldt Þ £ ´ µ £ ; dit resulteert in À´ µÀ £´ µ.<br />
¾<br />
De frequentieresponsie À´ µ is een periodieke functie van met een periode ¾. Verder vertoont de<br />
responsie de hierboven genoemde spiegelsymmetrie. Bij het tekenen van frequentiekarakteristieken<br />
kunnen we dus volstaan met het weergeven van À´ µ en ÖÀ´ µ℄ in het interval ¼tot
1.8. De frequentieresponsie À´ µ 15<br />
. Uit het even zijn van À´ µ en het oneven zijn van ÖÀ´ µ℄ volgt immers het verloop<br />
van deze functies voor tot ¼.<br />
Beschouw nu de functie ´Þµ À´ÞµÀ´Þ ½ µ; voor Þ geldt<br />
´ µÀ´ µÀ´ µÀ´ µÀ £´ µÀ´ µ ¾ <br />
De rationale functie ´Þµ À´ÞµÀ´Þ ½ µis een ‘nette’ rationale functie van Þ die op de eenheidscirkel<br />
gelijk is aan À´ µ ¾ en heet daarom een analytische voortzetting van À´ µ ¾ .<br />
In de vorige paragraaf hebben we in een voorbeeld het het (frequentieafhankelijke) verloop van<br />
de amplitudefactor À´ µ berekend. Deze berekening gaat echter eenvoudiger indien we eerst<br />
´Þµ berekenen en daarna met de substitutie Þ , het kwadraat À´ µ ¾ van de amplitudefactor<br />
bepalen. We lichten dit toe aan de hand van een voorbeeld.<br />
Voorbeeld 1.8.1 We beschouwen dus opnieuw de algemene tweede-orde overdrachtsfunctie<br />
dan is<br />
À´Þµ ¼Þ ¾· ½ Þ· ¾<br />
¼ Þ ¾· ½ Þ· ¾<br />
<br />
´Þµ À´ÞµÀ´Þ ½ µ ¼Þ ¾· ½ Þ· ¾<br />
¼ Þ ¾· ½ Þ· ¾<br />
¡ ¼Þ ¾· ½ Þ ½· ¾<br />
¼ Þ ¾· ½ Þ ½· ¾<br />
¾ ¼·¾ ½·¾ ¾·´ ¼ ½· ½ ¾ µ´Þ · Þ ½ µ· ¼ ¾´Þ ¾·Þ ¾ µ<br />
¾ ¼·¾ ½·¾ ¾·´ ¼ ½· ½ ¾ µ´Þ · Þ ½ µ· ¼ ¾´Þ ¾·Þ ¾ µ<br />
Nu bepalen we ´ µ en bedenken daarbij dat · ¾ Ó×´µ en ¾ · ¾ ¾ Ó×´¾µ:<br />
À´ µ ¾ ´ µ<br />
¾ ¼·¾ ½·¾ ¾·¾´ ¼ ½· ½ ¾ µ Ó×´µ·¾ ¼ ¾ Ó×´µ<br />
¾ ¼ · ¾ ½ · ¾ ¾ ·¾´ ¼ ½· ½ ¾ µ Ó×´µ·¾ ¼ ¾ Ó×´µ<br />
We zien dat in deze berekening geen goniometrische manipulaties nodig zijn.<br />
<br />
1.8.1 De grafische constructie van À en ÖÀ ℄ m.b.v. het pool-nulpunt-diagram<br />
In verg. (1.8) hebben we gezien dat de algemene overdrachtsfunctie geschreven kan worden als<br />
À´Þµ ¬ Â Þ Å Æ É Æ Â<br />
½ ´Þ Þ µ<br />
É Å½´Þ Ô µ <br />
hierin zijn de Þ ’s de nulpunten en de Ô ’s de polen van À´Þµ. Wanneer we m.b.v. deze uitdrukking<br />
de amplitudefactor À´ µ bepalen, volgt<br />
À´ µ ¬ Â <br />
É Æ Â<br />
½<br />
Þ <br />
É Å½<br />
Ô <br />
De factor Þ in de teller is in het complexe Þ-vlak de afstand tussen het punt (gelegen op<br />
de eenheidscirkel) en het nulpunt Þ . Deze afstand hangt af van de frequentie ; hoe deze afstand als<br />
functie van varieert is grafisch uit een pool-nulpunt-diagram af te leiden. Hetzelfde geldt voor de<br />
factor Ô in de noemer, die de afstand van het punt tot de pool Ô voorstelt. Een en ander is<br />
in Fig. 1.9 toegelicht; ga na hoe de afstanden variëren indien het interval van 0 tot doorloopt.
16 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
¾<br />
Ê<br />
Þ<br />
Þ Æ<br />
Ö <br />
Ô ¢<br />
Ê<br />
½ © ¼<br />
Þ<br />
Figuur 1.9: Bepaling van de amplitudefactor uit het pool-nulpunt-diagram.<br />
Æ<br />
¢<br />
¢<br />
Æ<br />
¢<br />
¢<br />
Æ<br />
<br />
Å<br />
½<br />
À´ µ<br />
<br />
¼ ¾ <br />
¹ <br />
Figuur 1.10: Voorbeeld van een pool-nulpunt-diagram en het bijbhorende amplitude-verloop.<br />
Uit een pool-nulpunt-diagram kan dus À´ µ eenvoudig (op de schaalfactor ¬ na) worden geconstrueerd;<br />
deze constructie kan ook in gedachten worden uitgevoerd en geeft dan een snel globaal<br />
inzicht in het verloop van À´ µ.<br />
In Fig. 1.10 is een voorbeeld van een pool-nulpunt-diagram met het bijbehorende verloop van<br />
À´ µ getekend.<br />
We maken nog enkele (voor de hand liggende) opmerkingen over het verloop van À:<br />
– Polen dicht bij de eenheidscirkel trekken À omhoog.<br />
– Nulpunten dicht bij de eenheidscirkel trekken À omlaag.<br />
– Nulpunten op de eenheidscirkel leiden tot À ¼.<br />
- Nulpunten of polen in Þ ¼hebben geen invloed op À.<br />
Ook ÖÀ´ µ℄ is m.b.v. een pool-nulpunt-diagram te construeren. Deze constructie volgt uit<br />
<br />
Æ Â<br />
ÖÀ´ µ℄ Ö¬  ℄·´Å Ƶ·<br />
½<br />
Ö´ Þ µ<br />
Å<br />
½<br />
Ö´ Ô µ<br />
Het beschouwen van de hoeken van de vectoren die met de polen en de nulpunten verbindt, geeft<br />
dus ook inzicht in het verloop van ÖÀ℄.<br />
Opmerking<br />
De polen en nulpunten van een overdrachtsfunctie vertonen een spiegelsymmetrie; ze treden<br />
in toegevoegd complexe paren op (zoals in Fig. 1.10). Dat dit zo is, volgt direct uit de
1.9. De realisering van een overdrachtssysteem 17<br />
spiegeleigenschap (1.9). Voor een nulpunt Þ geldt immers À´Þ µ¼; uit (1.9) volgt dan<br />
À´Þ £ µ¼£ ¼d.w.z. dat Þ £ ook een nulpunt is. Dat een pool Ô een paar vormt met een pool<br />
Ô £ volgt op analoge wijze.<br />
1.8.2 De bemonstering van een analoog sinusoïdaal signaal; het verband tussen en<br />
<br />
We gaan nu in op de betekenis van de frequentie van een tijddiscrete sinusoïde Ó×´Òµ. De hoek<br />
is niet meer en niet minder dan de toename van het argument van de sinusoïde wanneer we Ò met<br />
één vermeerderen. Bij een kleine waarde van ( ¼) zal de toename van het argument ‘per stap’<br />
klein zijn en de sinusoïde zal ‘langzaam’ variëren; een vergroting van zal een ‘snellere’ variatie<br />
veroorzaken.<br />
De variabele Ò is een variabele die slechts de nummering van de signaalwaarden aangeeft; deze nummering<br />
hoeft niet met een tijdvariabele samen te hangen. Wanneer Ò echter wel met de tijd samenhangt<br />
omdat het digitale signaal voortkomt uit de bemonstering van een analoog tijdsignaal, krijgt de<br />
frequentie een meer fysische betekenis. Op deze betekenis gaan we nu in door de bemonstering van<br />
een tijdcontinu sinusoïdaal signaal ´Øµ te beschouwen:<br />
´Øµ Ñ Ó×´Ø · µ Ñ Ó×´¾Ø · µ<br />
Bemonstering van dit signaal met een bemonsteringsinterval Ì ,debemonsteringsfrequentie is dan<br />
× ½Ì (Hertz), levert het digitale signaal<br />
Ò℄ ´ÒÌ µ Ñ Ó×´ÒÌ · µ Ñ Ó×´Ò · µ met Ì ¾<br />
×<br />
<br />
× ¾ <br />
Er bestaat dus een lineair verband tussen en enerzijds en anderzijds. Een bepaalde waarde<br />
van de hoek komt nu overeen met een bepaalde frequentie of (in Hertz) en de hoek heeft de<br />
betekenis van een genormeerde frequentie.<br />
Het interval ¼tot komt overeen met ¼tot Ì ofwel ¼tot × ¾.<br />
1.9 De realisering van een overdrachtssysteem<br />
We hebben ons tot nu toe bezig gehouden met de analyse van een overdrachtssysteem dat opgebouwd<br />
is uit optellers, tijdvertragers en vermenigvuldigers. Het bleek dat we zo’n overdrachtssysteem konden<br />
beschrijven met een differentievergelijking of met een overdrachtsfunctie.<br />
Bij de realisering of synthese van een systeem is het de bedoeling om m.b.v. de bekende elementen<br />
een systeem op te bouwen dat een gegeven D.V. of overdrachtsfunctie heeft. We willen dus een<br />
gegeven D.V. ofwel À´Þµ realiseren met<br />
Æ<br />
Å<br />
È Æ¼<br />
Þ <br />
ÝÒ℄ ÜÒ ℄ · ÝÒ ℄ ofwel À´Þµ È<br />
½ Ž<br />
Þ <br />
¼<br />
½<br />
Dit zijn de vergelijkingen (1.6) na vervanging van de «’s door ’s en de ¬’s door ’s. De ’s en ’s<br />
zijn hierbij willekeurige gegeven constanten.<br />
In Fig. 1.11 is een voor de hand liggende realisering gegeven (verifieer deze zelf). Deze realisering<br />
bevat Å · Æ vertragers.<br />
Twee realiseringen met het minimum aantal vertragers Ä met Ä ÑÜ´ÅƵ, zijn in Fig. 1.12<br />
gegeven; deze realiseringen staan bekend onder de namen ‘directe vorm I’ en ‘directe vorm II’. Ga<br />
zelf na dat deze filters de gewenste D.V. en À´Þµ hebben.
18 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
ÜÒ℄ ¹<br />
<br />
Þ ½ ¹ Þ ½ ¹ ¡¡¡ ¹ Þ<br />
½<br />
<br />
<br />
<br />
<br />
«<br />
Å<br />
<br />
<br />
<br />
¼ ½ ¾ Æ<br />
<br />
<br />
¨ÝÒ℄<br />
· ¹<br />
©<br />
<br />
<br />
Å ¾ ½<br />
<br />
Þ ½ <br />
¡¡¡ <br />
Þ ½ <br />
Þ ½<br />
<br />
Figuur 1.11: Realisering van een gegeven overdrachtsfunctie.<br />
Opmerking<br />
In de drie gegeven realiseringen kunnen één of meerdere ’s en/of ’s gelijk aan nul zijn. In de<br />
laatste twee realiseringen (Fig. 1.12) zullen voor Å Æ Äin ieder geval de coëfficiënten<br />
Å ·½ , Å ·¾ ¡¡¡ Ä gelijk aan nul zijn. Voor Æ Å Ä zijn in ieder geval Æ ·½ ,<br />
Æ ·¾ ¡¡¡ Ä gelijk aan nul.<br />
De gegeven schakelingen kunnen op drie manieren gezien worden:<br />
– als een realisering van een algemene D.V. of À´Þµ,<br />
– als een vervangingsschema van een willekeurig digitaal filter met Ä vertragers of<br />
– als een rekenschema dat aangeeft hoe een computer (in ‘hardware’ of ‘software’) kan worden geprogrammeerd<br />
om de gewenste D.V. of À´Þµ te realiseren.<br />
We beschrijven nu een ‘software’ programma dat uitgaat van het rekenschema volgens het bovenste<br />
schema in Fig. 1.12. In dit programma worden de rollen van de Ä vertragers overgenomen door Ä<br />
geheugenplaatsen × ½ , × ¾ ¡¡¡× Ä . We gaan uit van de toestand op een ‘tijdstip’ Ò ¼ en gaan na wat de<br />
computer moet doen tussen de tijdstippen Ò ¼ en Ò ¼ ·½. Op het tijdstip Ò ¼ bevatten de geheugenplaatsen<br />
de waarden × ½ Ò ¼ ℄, × ¾ Ò ¼ ℄ ¡¡¡× Ä Ò ¼ ℄ en heeft het ingangssignaal de waarde ÜÒ ¼ ℄. Het<br />
computerprogramma moet nu de volgende bewerkingen uitvoeren:<br />
stap 1. de waarde van het uitgangssignaal ÝÒ ¼ ℄ bepalen met<br />
ÝÒ ¼ ℄× ½ Ò ¼ ℄· ¼ ÜÒ ¼ ℄;<br />
stap 2. de nieuwe inhoud van de geheugenplaats × ½ bepalen met<br />
× ½ Ò ¼ ·½℄× ¾ Ò ¼ ℄· ½ ÜÒ ¼ ℄· ½ ÝÒ ¼ ℄;<br />
stap 3. de nieuwe inhoud van de geheugenplaats × ¾ bepalen met<br />
× ¾ Ò ¼ ·½℄× ¿ Ò ¼ ℄· ¾ ÜÒ ¼ ℄· ¾ ÝÒ ¼ ℄;<br />
.<br />
stap L+1. de nieuwe inhoud van de geheugenplaats × Ä bepalen met<br />
× Ä Ò ¼ ·½℄ Ä ÜÒ ¼ ℄· Ä ÝÒ ¼ ℄.<br />
Wanneer dit alles gebeurd is, staat het systeem klaar om op het tijdstip Ò ¼ ·½ de nieuwe waarde<br />
ÜÒ ¼ ·½℄van het ingangssignaal te ontvangen; de geschetste cyclus kan dan weer van voor af aan<br />
worden doorlopen.
1.10. De impulsresponsie, de convolutiesom en de stabiliteit 19<br />
ÜÒ℄<br />
Ä<br />
<br />
<br />
¡¡¡<br />
½<br />
<br />
¼<br />
<br />
· ¹ Þ<br />
½ ¹ · <br />
¹ Þ<br />
½ ¹<br />
¹<br />
Þ ½ ¹ <br />
· ¹ Þ<br />
½ ¹<br />
<br />
¡¡¡<br />
<br />
× <br />
<br />
Ä Ò℄ × Ä ½ Ò℄ × ¾ Ò℄ × ½ Ò℄<br />
ÝÒ℄<br />
· ¹<br />
Ä<br />
<br />
¡¡¡<br />
½<br />
ÜÒ℄<br />
¹<br />
¯<br />
Æ<br />
<br />
<br />
<br />
<br />
¼ ½ ¾<br />
<br />
· ¹ Þ<br />
½<br />
<br />
¹ Þ<br />
½<br />
<br />
¹ ¡¡¡<br />
<br />
¹ Þ<br />
½<br />
<br />
<br />
<br />
<br />
Ä<br />
<br />
<br />
¬<br />
<br />
ÝÒ℄<br />
· ¹<br />
<br />
¾<br />
<br />
Ä<br />
<br />
½<br />
<br />
¯<br />
Æ<br />
·<br />
<br />
¬<br />
<br />
Figuur 1.12: Twee realiseringen met een minimum aantal vertragers.<br />
We kunnen het voorgaande bijv. in de programmeertaal ‘Pascal’ implementeren.<br />
We slaan dan de waarden van de coëfficiënten ( ½¾¡¡¡Ä)en ( ¼½¡¡¡Ä)opintwee<br />
arrays ‘’ en‘’ gedeclareerd met<br />
var : array½Ä℄ of real; var : array¼Ä℄ of real;<br />
De geheugeninhouden × ( ½¾¡¡¡Ä) worden opgeslagen in een array ‘×’ gedeclareerd met<br />
var ×: array½Ä℄ of real;<br />
Het hierboven beschreven programmadeel komt er dan als volgt uit te zien:<br />
procedure Filter;<br />
begin<br />
end;<br />
haal het ingangssignaal binnen en ken dit toe aan de variabele Ü<br />
Ý ×½℄ · ¼℄ £ Ü ;<br />
het uitgangssignaal Ý kan nu naar buiten worden doorgegeven<br />
for ½ to Ä ½ do<br />
×℄ ×·½℄·℄£Ü·℄£Ý;<br />
×Ä℄Ä℄£Ü·Ä℄£Ý;<br />
De procedure ‘Filter’ wordt dan, gesynchroniseerd door een klok, steeds opnieuw aangeroepen.
20 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
1.10 De impulsresponsie Ò℄, de convolutiesom en de stabiliteit van een<br />
overdrachtssysteem ÜÒ℄ ÝÒ℄<br />
Tot nu toe zijn we twee manieren tegengekomen waarmee we een overdrachtssysteem volledig kunnen<br />
beschrijven, de differentievergelijking en de overdrachtsfunctie. We voegen hier nu de beschrijvingswijze<br />
m.b.v. de impulsresponsie Ò℄ aan toe en zullen zien dat de responsie ÝÒ℄ op een<br />
willekeurig signaal ÜÒ℄ gelijk is aan de convolutiesom<br />
ÝÒ℄ Ò℄£ÜÒ℄<br />
De eenheidsimpuls is gedefinieerd als (zie par. 1.1) ÆÒ℄ ½voor Ò ¼en ÆÒ℄ ¼voor Ò ¼en<br />
bezit de belangrijke zeefeigenschap waarmee een willekeurig signaal kan worden geschreven als een<br />
sommering van gewogen verschuivingen van deze eenheidsimpuls:<br />
ÜÒ℄ <br />
½<br />
½<br />
ÆÒ ℄Ü℄<br />
De impulsresponsie is per definitie de responsie van het systeem op de eenheidsimpuls:<br />
ÜÒ℄ ÆÒ℄ ÝÒ℄Ò℄<br />
De door ons beschouwde systemen zijn lineair en tijdinvariant (zie par. 1.6). Voor dit soort systeem<br />
kan de responsie ÝÒ℄ op een willekeurige excitatie ÜÒ℄ m.b.v. de impulsresponsie, worden bepaald.<br />
Immers<br />
per definitie geldt ÆÒ℄ Ò℄,<br />
uit de tijdinvariantie volgt ÆÒ ℄ Ò ℄,<br />
uit de lineariteit volgt ÆÒ ℄Ü℄ Ò ℄Ü℄,<br />
en eveneens<br />
È ½<br />
½ ÆÒ ℄Ü℄ È ½<br />
½ Ò ℄Ü℄.<br />
Met behulp van de zeefeigenschap van de deltafunctie volgt dat het linkerlid van de laatste uitdrukking<br />
gelijk is aan ÜÒ℄. De responsie ÝÒ℄ op een excitatie ÜÒ℄ kan dus worden geschreven als<br />
ÝÒ℄ <br />
½<br />
½<br />
Ò ℄Ü℄<br />
Deze sommering is een zogenaamde convolutiesom en kan (na vervanging van door Ò<br />
geschreven worden als<br />
ÝÒ℄ <br />
½<br />
½<br />
℄ÜÒ ℄<br />
) ook<br />
In het vervolg zullen we de convolutiesom symbolisch noteren m.b.v. een £-symbool:<br />
ÝÒ℄ Ò℄£ÜÒ℄<br />
½<br />
½<br />
Ò ℄Ü℄ <br />
½<br />
½<br />
℄ÜÒ ℄ (1.11)<br />
De convolutiesom is de tegenhanger van de convolutieintegraal uit het tijdcontinue en geeft aan hoe<br />
het verleden van het ingangssignaal meeweegt bij het bepalen van het uitgangssignaal op een bepaald<br />
moment. De impulsresponsie Ò℄ fungeert hierbij als weegfunctie. Zo zal de waarde ½℄ aangeven<br />
hoe sterk het ingangssignaal van 176 ‘momenten’ terug, ÜÒ ½℄, meeweegt in het huidige uitgangssignaal<br />
ÝÒ℄.
1.10. De impulsresponsie, de convolutiesom en de stabiliteit 21<br />
De door ons beschouwde systemen zijn causaal; in par. 1.6 zagen we dat dan (vanwege ÆÒ℄ ¼voor<br />
Ò¼) voor de impulsresponsie geldt:<br />
Ò℄ ¼voor Ò¼<br />
In de eerste sommering van (1.11) betekent dit dat voor de bovengrens Ò kan worden gelezen. In<br />
de tweede sommering kan de ondergrens gelijk aan ¼worden gesteld.<br />
Een ingangssignaal ÜÒ℄ begint ooit, bijvoorbeeld op Ò ¼. Voor de responsie van een causaal<br />
systeem op een, op Ò ¼beginnend ingangssignaal kan verg. (1.11) ook geschreven worden als<br />
ÝÒ℄ ¼voor Ò¼en ÝÒ℄ <br />
Ò<br />
¼<br />
Ò ℄Ü℄ <br />
Ò<br />
¼<br />
℄ÜÒ ℄ voor Ò ¼<br />
De impulsresponsie beschrijft een overdrachtssysteem volledig; d.w.z. indien we de impulsresponsie<br />
kennen, kunnen we de responsie op ieder willekeurig signaal bepalen (m.b.v. verg. (1.11).<br />
De responsie op een eigenfunctie ÜÒ℄ Þ Ò hebben we al leren kennen; deze is ÝÒ℄ À´ÞµÞ Ò .<br />
We bepalen deze responsie opnieuw, maar nu m.b.v. de convolutiesom. Dan is<br />
ÜÒ℄ Þ Ò<br />
ÝÒ℄<br />
½<br />
½<br />
℄ÜÒ ℄ <br />
½<br />
½<br />
℄Þ Ò <br />
<br />
<br />
<br />
½<br />
½<br />
℄Þ <br />
ÞÒ <br />
In deze laatste uitdrukking zien we dat de overdrachtsfunctie en de impulsresponsie samenhangen<br />
volgens<br />
À´Þµ <br />
½<br />
½<br />
Ò℄Þ Ò (1.12)<br />
De overdrachtsfunctie À´Þµ is dus enerzijds de factor waarmee het systeem de eigenfunctie Þ Ò vermenigvuldigt<br />
en anderzijds is hij de Þ-getransformeerde van de impulsresponsie.<br />
De impulsresponsie kan uit de overdrachtsfunctie worden bepaald via de Þ-terugtransformatie. Het<br />
is relatief eenvoudig is om de overdrachtsfunctie van een systeem te bepalen en het ligt daarom voor<br />
de hand om een gezochte impulsresponsie Ò℄ te bepalen door terugtransformatie van een À´Þµ. Op<br />
de Þ-terugtransformatie komen we in par. 2.4 terug.<br />
1.10.1 De stabiliteit van een overdrachtssysteem<br />
We introduceren nu een belangrijke eis die we aan overdrachtssystemen zullen stellen, namelijk de<br />
eis van stabiliteit. Wedefiniëren deze stabiliteit met:<br />
een overdrachtssysteem is stabiel indien iedere begrensde excitatie<br />
een begrensde responsie veroorzaakt<br />
Deze voorwaarde voor stabiliteit wordt in de literatuur ook wel de BIBO-stabiliteit genoemd; hierbij<br />
staat BIBO voor ‘bounded-input bounded-output’.<br />
Een ingangssignaal ÜÒ℄ is begrensd indien het voor alle waarden van Ò voldoet aan ÜÒ℄ ½;<br />
de waarden van het signaal zijn dan begrensd tot een interval tot . Ruwweg gezegd: het ingangssignaal<br />
is ‘eindig’. De stabiliteit eist dan dat het bijbehorende uitgangssignaal ÝÒ℄ ook eindig<br />
blijft en dus begrensd is. Omdat een overdrachtssysteem volledig gekarakteriseerd is door zijn impulsresponsie,<br />
zal de stabiliteit een eis opleggen aan Ò℄; deze eis is<br />
½<br />
Ò ½<br />
Ò℄ ½ ofwel: de impusresponsie is absoluut sommeerbaar. (1.13)
22 Hoofdstuk 1. <strong>Signal</strong>en en systemen in de discrete tijd<br />
Bewijs.<br />
Enerzijds geldt dat voor een willekeurig begrensd ingangssignaal ÜÒ℄ met ÜÒ℄ ½, de absolute<br />
waarde van het uitgangssignaal voldoet aan:<br />
ÝÒ℄ <br />
¬<br />
½<br />
½<br />
Ò ℄Ü℄<br />
½<br />
¬ <br />
½<br />
Ò ℄Ü℄ <br />
½<br />
½<br />
Ò ℄<br />
Dit betekent dat de absolute sommeerbaarheid van Ò℄ het begrensd zijn van ÝÒ℄ (en daarmee het<br />
bestaan van de convolutie) gegarandeert; het is daarom een voldoende voorwaarde voor stabiliteit.<br />
Anderzijds leidt het begrensde ingangssignaal ÜÒ℄×Ò´ Ò℄µ tot een uitgangs- signaal dat voor<br />
Ò ¼gelijk is aan<br />
ݼ℄ <br />
½<br />
½<br />
℄Ü℄ <br />
½<br />
½<br />
℄ ×Ò´ ℄µ <br />
½<br />
½<br />
℄<br />
Deze waarde is niet begrensd indien Ò℄ niet absoluut sommeerbaar is; de gestelde eis is dus ook een<br />
noodzakelijke voorwaarde.<br />
¾<br />
We zullen ons in het vervolg beperken tot stabiele overdrachtssystemen.<br />
Voorbeeld 1.10.1 Het voorgaande lichten we toe aan de hand van het eenvoudige systeem van<br />
Fig. 1.13. Voor ÜÒ℄ ÆÒ℄volgt uit een beschouwing van de schakeling direct dat het uitgangssignaal<br />
ÝÒ℄ Ò℄voldoet aan<br />
Ò℄ ¼voor Ò¼ ¼℄ ½ ½℄ ¾℄ ¾ ¡¡¡ en Ò ·½℄Ò℄<br />
ofwel Ò℄ ¼voor Ò¼en Ò℄ Ò voor Ò ¼.<br />
ÜÒ℄<br />
¹ · ¹ Þ<br />
½<br />
<br />
<br />
¹ ÝÒ℄<br />
Figuur 1.13: Voorbeeld.<br />
We testen de stabiliteit van het systeem door de sommering van Ò℄ van Ò ½ tot Ò ½ te<br />
bekijken. Vanwege Ò℄ ¼voor Ò¼krijgen we dan<br />
½<br />
Ò¼<br />
½<br />
Ò <br />
½<br />
½ voor ½ en Ò ½ voor ½<br />
Ò¼<br />
Het systeem is dus stabiel voor ½ ½.<br />
De bepaling van À´Þµ m.b.v. Þ-transformatie (1.12) leidt tot<br />
½<br />
½ Ò<br />
À´Þµ Ò Þ Ò <br />
<br />
Ò¼<br />
Ò¼<br />
<br />
Þ<br />
½<br />
½ ´Þµ <br />
Þ<br />
Þ
1.10. De impulsresponsie, de convolutiesom en de stabiliteit 23<br />
Merk op dat bovengenoemde sommering convergeert (bestaat) voor Þ ; bij een stabiel systeem<br />
is deze convergentie dus in ieder geval gegarandeerd voor Þ ½.<br />
Bepaal zelf nogmaals de overdrachtsfunctie, maar nu met de eerder behandelde methode d.w.z. door<br />
de amplitude te bepalen indien ÜÒ℄ Þ Ò .<br />
<br />
1.10.2 De lengte van een impulsresponsie<br />
In het algemeen zal de impulsresponsie Ò℄ van een tijddiscreet systeem oneindig lang duren; wanneer<br />
dit inderdaad het geval is spreken we van een IIR (Infinite Impulse Response) systeem.<br />
Een belangrijke subklasse van de discrete systemen wordt gevormd door de FIR systemen (Finite<br />
Impulse Response); dit zijn systemen waarvan de impulsresponsie een eindige lengte heeft.<br />
Aangezien de impulsresponsie van een FIR systeem dus slechts een eindig aantal van nul verschillende<br />
waarden bevat, is hij natuurlijk absoluut sommeerbaar; een FIR systeem is daarom altijd stabiel.<br />
Voor IIR systemen is de stabiliteit echter niet bij voorbaat gegarandeerd.<br />
Naast het karakteriseren van tijddiscrete systemen aan de hand van de lengte van de impulsresponsie,<br />
kunnen we ze ook onderscheiden naar het al dan niet optreden van terugkoppellussen in de realisering<br />
van het systeem. Indien terugkoppelingen aanwezig zijn, noemen we het systeem recursief ; wanneer<br />
deze terugkoppellussen ontbreken, heet het systeem niet-recursief.<br />
Meestal is een recursief systeem een IIR systeem en een niet-recursief systeem een FIR systeem.<br />
Indien we in de realisering van Fig. 1.11 of 1.12 de ’s gelijk aan nul maken zijn er geen terugkoppellussen<br />
aanwezig en het systeem is dan niet-recursief. De differentievergelijking heeft dan de vorm<br />
ÝÒ℄ ¼ ÜÒ℄· ½ ÜÒ ½℄ · ¾ ÜÒ ¾℄ · ¡¡¡· Æ ÜÒ Æ℄<br />
Het verleden van het uitgangssignaal zelf doet dus niet mee in het bepalen van het uitgangssignaal op<br />
een bepaald moment. Voor de impulsresponsie volgt dan<br />
Ò℄ <br />
´<br />
Ò voor Ò ¼½¡¡¡Æ<br />
¼ voor Ò¼en ÒÆ<br />
De waarden van de impulsresponsie worden dus direct door de waarden van de vermenigvuldigers<br />
gegeven.<br />
Overigens wordt de structuur van Fig. 1.11, waarin de ’s gelijk aan nul zijn, een transversale structuur<br />
of afgetapte vertragingslijn (tapped delay line) genoemd.<br />
Met FIR systemen is het mogelijk om de belangrijke klasse van lineaire-fase filters te realiseren. Deze<br />
filters worden in Hfdst. 10 behandeld.