CapÃtulo 10 - Programa de Engenharia QuÃmica - COPPE / UFRJ
CapÃtulo 10 - Programa de Engenharia QuÃmica - COPPE / UFRJ
CapÃtulo 10 - Programa de Engenharia QuÃmica - COPPE / UFRJ

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>10</strong>. INTRODUÇÃO À OTIMIZAÇÃO<strong>10</strong>.1 Formulação <strong>de</strong> ProblemasOs componentes chaves da formulação <strong>de</strong> um problema <strong>de</strong> otimização são:1) A função objetivo2) O mo<strong>de</strong>lo do processo3) As restriçõesA função objetivo representa lucro, custo, energia, produção, distância, etc., em termosdas variáveis <strong>de</strong> <strong>de</strong>cisão do processo ou sistema em análise. O mo<strong>de</strong>lo do processo e asrestrições <strong>de</strong>screvem as inter-relações entre estas variáveis.<strong>10</strong>.1.1 AplicaçõesAs técnicas <strong>de</strong> otimização, que buscam a melhor solução para um problema (máximosou mínimos <strong>de</strong> gran<strong>de</strong>zas mensuráveis em seus domínios <strong>de</strong> <strong>de</strong>finição), fazem-se necessáriasem muitas áreas da engenharia, tais como:• pesquisa operacional: otimização <strong>de</strong> sistemas técnico-econômicos, controle <strong>de</strong>estoques, planejamento <strong>de</strong> produção, etc.;• engenharia <strong>de</strong> processos: dimensionamento e otimização <strong>de</strong> processos, integraçãomássica e energética <strong>de</strong> processos, estimação <strong>de</strong> parâmetros, reconciliação <strong>de</strong> dados,análise <strong>de</strong> flexibilida<strong>de</strong>, etc.;• controle <strong>de</strong> processos: i<strong>de</strong>ntificação <strong>de</strong> sistemas, controle ótimo, controle adaptativo,controle preditivo, estimadores <strong>de</strong> estados, etc.;• análise numérica: aproximações, regressão, solução <strong>de</strong> sistemas lineares e nãolineares,etc.A otimização po<strong>de</strong> ser efetuada em diferentes níveis <strong>de</strong>ntro <strong>de</strong> uma empresa, <strong>de</strong>s<strong>de</strong>uma combinação complexa <strong>de</strong> plantas e unida<strong>de</strong>s <strong>de</strong> suprimentos, passando por plantasindividuais, combinações <strong>de</strong> unida<strong>de</strong>s, equipamentos, peças <strong>de</strong> equipamentos, até entida<strong>de</strong>smenores. Portanto, o escopo <strong>de</strong> um problema <strong>de</strong> otimização po<strong>de</strong> ser toda a empresa, umaplanta, um processo, uma equipamento, uma peça <strong>de</strong> um equipamento, ou qualquer sistemaintermediário entre estes. Em uma indústria típica existem três níveis que po<strong>de</strong>m serotimizados: nível gerencial, nível <strong>de</strong> projeto <strong>de</strong> processo e especificação <strong>de</strong> equipamento enível <strong>de</strong> operação <strong>de</strong> plantas.
Existe uma série <strong>de</strong> atributos <strong>de</strong> processos que afetam os custos ou lucros, tornando-osatrativos para aplicação <strong>de</strong> otimização, tais como:- vendas limitadas pela produção aumento <strong>de</strong> capacida<strong>de</strong> produtiva- vendas limitadas pelo mercado aumento <strong>de</strong> eficiência ou produtivida<strong>de</strong>- gran<strong>de</strong>s unida<strong>de</strong>s <strong>de</strong> processamento redução dos custos <strong>de</strong> produção- elevados consumos <strong>de</strong> matéria-prima ou energia redução do consumo- qualida<strong>de</strong> do produto superior às especificações operar perto das restrições- perda <strong>de</strong> componentes valiosos para os efluentes ajustes e re-aproveitamentos- alto custo <strong>de</strong> mão-<strong>de</strong>-obra automação e replanejamento das unida<strong>de</strong>s.Exemplo 1: No projeto <strong>de</strong> um sistema <strong>de</strong> resfriamento representado abaixo:F, t oA 1 , U 1W 1 , T 1F, t 1W 2 , T 2 W 3 , T 3F, t 2 F, t 3A 2 , U 2 A 3 , U 3W 3 , T 3W 1 , T 1W 2 , T 2<strong>de</strong>seja-se dimensionar os trocadores <strong>de</strong> calor <strong>de</strong> modo a resfriar a corrente a temperatura t opara t 3 com o menor custo possível. Uma análise econômica levou a seguinte expressão docusto do sistema:custo por unida<strong>de</strong>: ci ai Ai biWicusto total: cT3i1cion<strong>de</strong> o coeficiente a i é função do tipo <strong>de</strong> trocador <strong>de</strong> calor e do fluido refrigerante e b i é ocusto unitário do refrigerante. Uma análise técnica (balanço <strong>de</strong> energia) gerou as seguintesrelações restritivas:AiFCp ti lnU ti1i Ti T ie W FCp i ( ti1ti)on<strong>de</strong> Cp é o calor específico da corrente, U i é o coeficiente global <strong>de</strong> troca térmica e i é ocalor <strong>de</strong> vaporização do refrigerante. Portanto, dados os tipos <strong>de</strong> trocadores <strong>de</strong> calor e fluidosrefrigerantes, e conhecidas as temperaturas T i e as proprieda<strong>de</strong>s Cp, i e U i , o problema <strong>de</strong>levar a corrente (F, t o ) para a condição (F, t 3 ) da maneira mais econômica possível, consisteem minimizar c T no projeto dos trocadores <strong>de</strong> calor.2i
<strong>10</strong>.1.2 NomenclaturaNo contexto <strong>de</strong> otimização os problemas são tratados <strong>de</strong>ntro da seguintes <strong>de</strong>finições:função objetivo: é a função matemática cujo máximo ou mínimo <strong>de</strong>seja-se <strong>de</strong>terminar. Noexemplo acima a função objetivo é o custo total.variáveis <strong>de</strong> <strong>de</strong>cisão:são as variáveis in<strong>de</strong>pen<strong>de</strong>ntes que aparecem na função objetivo.Correspon<strong>de</strong>m, em número, ao excesso <strong>de</strong> variáveis em relação aonúmero <strong>de</strong> equações (restrições <strong>de</strong> igualda<strong>de</strong>), isto é, o grau <strong>de</strong>liberda<strong>de</strong> do sistema. No exemplo acima tem-se 6 equações (3 paraA i e 3 para W i ) e 8 variáveis (t 1 , t 2 , A i e W i ), portanto 2 variáveis <strong>de</strong><strong>de</strong>cisão ou grau <strong>de</strong> liberda<strong>de</strong> igual a 2.restrições: são os limites impostos ao sistema ou estabelecidos pelas leis naturais quegovernam o comportamento do sistema, a que estão sujeitas as variáveis <strong>de</strong><strong>de</strong>cisão. As restrições po<strong>de</strong>m ser <strong>de</strong> igualda<strong>de</strong> (equações) ou <strong>de</strong> <strong>de</strong>sigualda<strong>de</strong>(inequações). No exemplo acima tem-se 6 restrições <strong>de</strong> igualda<strong>de</strong> e 3 restrições<strong>de</strong> <strong>de</strong>sigualda<strong>de</strong>: t 3 t 2 t 1 t o .região <strong>de</strong> busca:ou região viável, é a região do espaço <strong>de</strong>finido pelas variáveis <strong>de</strong><strong>de</strong>cisão, <strong>de</strong>limitada pelas restrições, em cujo interior ou em cuja fronteirase localiza o ótimo da função objetivo. No exemplo acima, tomando t 1 et 2 como variáveis <strong>de</strong> <strong>de</strong>cisão, a região <strong>de</strong> busca é aquela <strong>de</strong>limitada pelasrestrições <strong>de</strong> <strong>de</strong>sigualda<strong>de</strong>.t 2t 1 t 2t 3t ot 1No exemplo acima, o problema <strong>de</strong> otimização foi gerado pela busca <strong>de</strong> um projetoótimo do processo. Outra aplicação típica <strong>de</strong> técnicas <strong>de</strong> otimização aparece na melhoria dascondições <strong>de</strong> operação <strong>de</strong> um processo em produção.Exemplo 2: No processo <strong>de</strong> extração por solvente puro, ilustrado abaixo, <strong>de</strong>seja-se encontrara condição <strong>de</strong> operação com a maior lucrativida<strong>de</strong> possível.3
48 WARSCHAUER ET AL.Downloa<strong>de</strong>d by [University Library Utrecht] at 13:21 <strong>10</strong> February 2014support is important when implementing one-to-one laptop programs (Drayton, Falk, Stroud,Hobbs, & Hammerman, 20<strong>10</strong>; Rutledge, Duran, & Carroll-Miranda, 2007). In Massachusetts,for example, one program <strong>de</strong>ployed laptops to middle school stu<strong>de</strong>nts to use throughout theday (Bebell & Kay, 20<strong>10</strong>). Although teachers and stu<strong>de</strong>nts in this study <strong>de</strong>scribed how laptopstransformed their classrooms into stu<strong>de</strong>nt-centered, collaborative environments, teachers’ use oflaptops varied wi<strong>de</strong>ly. Bebell and Kay (20<strong>10</strong>, p. 48) suggest that “it is impossible to overstatethe power of individual teachers in the success or failure of 1:1 computing” given the amount ofteacher training, investment in curriculum <strong>de</strong>velopment, and creation of new assessment methodsrequired when laptops are introduced. The financial bur<strong>de</strong>n of not only <strong>de</strong>ploying laptops, but alsoimplementing new assessments and teacher <strong>de</strong>velopment is a consi<strong>de</strong>ration when implementingthese programs in schools. These investments may particularly challenge low-SES schools,which usually face more severe budgetary constraints in providing these ongoing supports.These constraints can lead to inequitable implementation of technology programs (Becker, 2000;Warschauer, Knobel, & Stone, 2004; Wenglinsky, 2005).Laptop programs also may increase differences within schools between high- and lowachievingstu<strong>de</strong>nts. A study evaluating the Texas Technology Immersion Project, a one-tooneprogram in middle schools, suggested that test score gains were primarily seen in alreadyhigh-achieving stu<strong>de</strong>nts (Shapley, Sheehan, Sturges, Caranikas-Walker, Huntsberger, &Maloney, 2007); a subsequent study of this program found that the <strong>de</strong>vices, teachers’ professional<strong>de</strong>velopment, online curriculum resources, and online stu<strong>de</strong>nt assessments variedacross schools and teachers (Shapley, Sheehan, Maloney, & Caranikas-Walker, 20<strong>10</strong>). Theseresults suggest that laptop programs may increase disparities between high- and low-performingstu<strong>de</strong>nts.Two of the three districts discussed in this article implemented what might be called anintegrative approach, in which provision of hardware and software is balanced with broa<strong>de</strong>rforms of infrastructural and social support, including wireless Internet access, technical support,teacher training, and curricular reform (see Warschauer, 2011). The third district we studied waspart of the One Laptop per Child (OLPC) program, which emphasizes the transformative potentialof children’s ownership and autonomous use of its proprietary laptops and, thus, <strong>de</strong>-emphasizesfunding of teacher training, technology infrastructure, technical support, or curricular reform (seeOne Laptop per Child, n.d.; Warschauer & Ames, 20<strong>10</strong>).Comparing case studies from two school districts (Saugus and Littleton) following the integrativeapproach and one district (Birmingham) following the OLPC approach, this study examinesdifferences across multiple levels of implementation: mo<strong>de</strong>ls, districts, and case classrooms.METHODSResearch SitesThe three public school districts in this study—Birmingham, Littleton, and Saugus—share characteristicsthat make them suitable for comparison: each implemented a one-to-one programin upper elementary classrooms with inexpensive netbooks and open source software. Despitethese similarities, the districts vary in their <strong>de</strong>mographics, implementation mo<strong>de</strong>l, and stu<strong>de</strong>ntoutcomes.
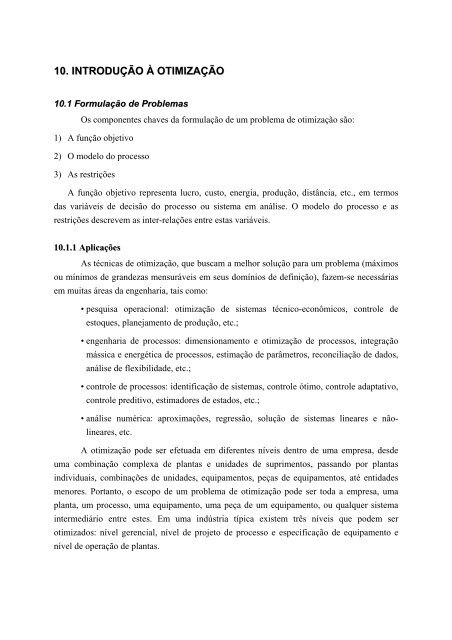
0.02inviáveleconomicamente00.0155X20.01180.005<strong>10</strong>150.005 0.01 0.015 0.02 0.025 0.03X1Outra aplicação muito comum, que utiliza as técnicas <strong>de</strong> otimização, é o ajuste <strong>de</strong>mo<strong>de</strong>los matemáticos a dados experimentais (ajuste <strong>de</strong> curvas), on<strong>de</strong> a função objetivoutilizada, S(x), é formada pelos quadrados dos <strong>de</strong>svios do mo<strong>de</strong>lo em relação aos dadosexperimentais (mínimos quadrados):NSx ( ) [ y( x) y ]j1jon<strong>de</strong> y(x) é o mo<strong>de</strong>lo proposto (ou tipo <strong>de</strong> curva) para ser ajustado aos N dadosexperimentais y exp , e x são os parâmetros <strong>de</strong> ajuste do mo<strong>de</strong>lo. Ou, se for utilizado o métododa máxima verossimilhança:NexpjexpSx ( ) 1 [ yj( x) yj]2j1 j2on<strong>de</strong> j são as variâncias dos dados experimentais.22<strong>10</strong>.1.3 Procedimento geralNão existe um único método que po<strong>de</strong> ser aplicado eficientemente para todos osproblemas. O método escolhido para um caso particular <strong>de</strong>pen<strong>de</strong> das características da funçãoobjetivo, da natureza das restrições e do número <strong>de</strong> variáveis do problema. Contudo, osseguintes passos <strong>de</strong>vem ser observados na formulação e solução <strong>de</strong> um problema <strong>de</strong>otimização:1) Análise do processo e suas variáveis;2) Determinação do critério para otimização e especificação da função objetivo em termosdas variáveis do processo;5
3) Desenvolvimento do mo<strong>de</strong>lo para o processo, relacionando as suas variáveis através <strong>de</strong>restrições <strong>de</strong> igualda<strong>de</strong> e <strong>de</strong>sigualda<strong>de</strong>. Cálculo do grau <strong>de</strong> liberda<strong>de</strong> do sistema;4) Se a formulação do problema é <strong>de</strong> dimensão elevada, então procurar particionar oproblema em partes menores ou simplificar a função objetivo e/ou o mo<strong>de</strong>lo;5) Aplicação <strong>de</strong> técnicas apropriadas <strong>de</strong> otimização;6) Analisar a solução obtida e a sua sensibilida<strong>de</strong> frente a variações em parâmetros domo<strong>de</strong>lo e suas consi<strong>de</strong>rações (hipóteses).<strong>10</strong>.1.4 Dificulda<strong>de</strong>s encontradasProblemas <strong>de</strong> otimização que apresentam funções objetivo e/ou restrições complicadaspo<strong>de</strong>m apresentar gran<strong>de</strong>s dificulda<strong>de</strong>s para obter a solução pelo uso <strong>de</strong> algumas técnicas <strong>de</strong>otimização. Algumas <strong>de</strong>stas complicações estão listadas abaixo:- função objetivo e/ou restrições po<strong>de</strong>m apresentar <strong>de</strong>scontinuida<strong>de</strong>s;- função objetivo e/ou restrições não lineares;- função objetivo e/ou restrições po<strong>de</strong>m estar <strong>de</strong>finidas em termos <strong>de</strong> complicadasinterações entre as variáveis, po<strong>de</strong>ndo ocorrer valores não únicos <strong>de</strong>stas variáveis para ovalor ótimo da função objetivo;- função objetivo e/ou restrições po<strong>de</strong>m exibir patamares (pouca sensibilida<strong>de</strong> à variaçãodas variáveis) para alguns intervalos das variáveis e comportamento exponencial (muitasensibilida<strong>de</strong>) para outros intervalos;- função objetivo po<strong>de</strong> apresentar ótimos locais.<strong>10</strong>.2. Conceitos Básicos<strong>10</strong>.2.1 Mínimos e máximosSeja uma função S: X n . Diz-se que x* é um mínimo global (ou absoluto) <strong>de</strong>S se S(x*) S(x) x X, e que x* é um mínimo local (ou relativo) <strong>de</strong> S se existe > 0, talque S(x*) S(x) x tal que ||x x*|| < . Se as <strong>de</strong>sigualda<strong>de</strong>s forem estritas, isto é,S(x*) < S(x) tem-se mínimos globais e locais estritos.S(x)mínimos locaismínimo global 6x
Se existe um número tal que S(x) x X e, para um suficientemente pequeno,S(x) < + para algum x X, então é o ínfimo (ou valor inferior) <strong>de</strong> S(x). Consi<strong>de</strong>rando ospontos , então toda função S(x) tem um ínfimo e um supremo (ou valor superior) em X.Nem toda função tem mínimo (máximo), mas se ele existir <strong>de</strong>ve ser finito e é obtido noínfimo (supremo), isto é,S(x*) = min S(x) inf S(x)[S(x*) = max S(x) sup S(x)]xXxXPor exemplo, a função S(x) = e x não tem máximo em X = e a função S(x) = e -x não temmínimo em X = . Contudo, o supremo <strong>de</strong> e x é +, e o ínfimo <strong>de</strong> e -x é zero.xXxX<strong>10</strong>.2.2 Condições para a otimalida<strong>de</strong>Otimização sem restriçãoNo caso da otimização sem restrições, on<strong>de</strong> <strong>de</strong>seja-se encontrar os pontos extremos dafunção objetivo, tem-se as seguintes condições <strong>de</strong> otimalida<strong>de</strong>.• Condição necessária <strong>de</strong> primeira or<strong>de</strong>m:Para que x* seja um mínimo (máximo) local da função S(x), diferenciável em x*, énecessário que:S(x*) = 0• Condição necessária <strong>de</strong> segunda or<strong>de</strong>m:Para que x* seja um mínimo (máximo) local da função S(x), duas vezes diferenciávelem x*, é necessário que:S(x*) = 0 e queH(x*) 2 S(x*) seja positiva (negativa) semi<strong>de</strong>finidaon<strong>de</strong> H(x*) é chamada <strong>de</strong> matriz Hessiana.Observa-se que estas condições são apenas necessárias porque os termos <strong>de</strong> primeira esegunda or<strong>de</strong>m po<strong>de</strong>m estar nulos, <strong>de</strong>ixando ainda dúvida sobre a natureza <strong>de</strong> x*.• Condição suficiente:Seja S(x) duas vezes diferenciável em x* tal que:S(x*) = 0 eH(x*) seja positiva (negativa) <strong>de</strong>finidaentão x* é um mínimo (máximo) local estrito <strong>de</strong> S.7
Po<strong>de</strong>-se analisar a condição da matriz Hessiana, H(x*), pelas seguintes formas:1) Pela sua contribuição no termo <strong>de</strong> segunda or<strong>de</strong>m da expansão em série <strong>de</strong> Taylor em tornodo ponto ótimo.1 TS( x) S(x*) ( x x*)H ( x*)(x x*)22) Pelos sinais dos valores característicos <strong>de</strong> H(x*).Decompondo a matriz Hessiana em seus valores e vetores característicos:H(x*) = V V -1on<strong>de</strong> V é a matriz dos vetores característicos (nas colunas) e é a matriz dos valorescaracterísticos (na diagonal). Definindo z(x) = V -1 (x - x*) e lembrando que sendo a matrizHessiana simétrica então V -1 = V T (matriz ortogonal) e (x - x*) T V = z T . Desta forma aexpansão em série <strong>de</strong> Taylor po<strong>de</strong> ser escrita como:1S(x) S(x*)2zT1 n2 z izi23) Pelos sinais dos <strong>de</strong>terminantes das primeiras menores principais <strong>de</strong> H(x*) (critério <strong>de</strong>Sylvester).A menor M ij <strong>de</strong> uma matriz H é <strong>de</strong>finida como a matriz obtida pela remoção da i-ésima linha e da j-ésima coluna <strong>de</strong> H. Uma menor principal <strong>de</strong> or<strong>de</strong>m k é uma matriz obtidapela remoção <strong>de</strong> quaisquer n – k colunas e suas linhas correspon<strong>de</strong>ntes <strong>de</strong> uma matriz <strong>de</strong>or<strong>de</strong>m n. A primeira menor principal <strong>de</strong> or<strong>de</strong>m k <strong>de</strong> uma matriz H, <strong>de</strong>notada por M k (H), éobtida pela remoção das últimas n – k colunas e linhas da matriz H. Observa-se que os<strong>de</strong>terminantes das primeiras menores principais <strong>de</strong> or<strong>de</strong>m 1,2,...,n da matriz são,respectivamente: 1 , 1 2 , ..., 1 2 3 n .Na tabela a seguir apresenta-se as relações entre a matriz Hessiana e as três formas <strong>de</strong>analisar a sua condição.H(x*) Taylor k = <strong>de</strong>t (M k )positiva semi<strong>de</strong>finida x T H x 0 0 0positiva <strong>de</strong>finida x T H x > 0 > 0 > 0negativa semi<strong>de</strong>finida x T H x 0 0 (-1) k k 0negativa <strong>de</strong>finida x T H x < 0 < 0 (-1) k k > 0i1não <strong>de</strong>finida x T H x 0 0 dos acima8
isto é, uma matriz positiva semi<strong>de</strong>finida. O gráfico abaixo ilustra a função S(x), on<strong>de</strong> observaseque x* = 0 não é um ponto <strong>de</strong> mínimo. Fazendo a mesma análise com a mudança <strong>de</strong>2variável y , verifica-se que a origem é um ponto sela.x 2150<strong>10</strong>050S(x)0-50-<strong>10</strong>05005x2-5-5x1Otimização com restriçõesNa otimização com restrição o problema que está sendo resolvido é:min S(x) ou max S(x)sujeito a restrições <strong>de</strong> igualda<strong>de</strong> e/ou <strong>de</strong> <strong>de</strong>sigualda<strong>de</strong>, que <strong>de</strong>finem a região viável, sendo quequalquer ponto nesta região é uma solução viável. Depen<strong>de</strong>ndo do tipo <strong>de</strong> função objetivo e<strong>de</strong> suas restrições, os problemas <strong>de</strong> otimização com restrição são comumente chamados <strong>de</strong>programação linear, programação quadrática, programação não-linear, programação inteira eprogramação mista.<strong>Programa</strong>ção linear: função objetivo e restrições linearesmin S(x) = c T xsujeito a: A x bx 0on<strong>de</strong> A é uma matriz m x n, isto é, m restrições e n variáveis.<strong>Programa</strong>ção quadrática: função objetivo quadrática e restrições linearesminTS( x) c x sujeito a: A x b<strong>10</strong>x 012Tx Qx
<strong>Programa</strong>ção não-linear: função objetivo e/ou restrições não-linearesmin S(x)sujeito a:h j (x) = 0 , j = 1, 2, ..., mg j (x) 0 , j = 1, 2, ..., pon<strong>de</strong> h j (x) são m restrições <strong>de</strong> igualda<strong>de</strong> e g j (x) são p restrições <strong>de</strong> <strong>de</strong>sigualda<strong>de</strong>.<strong>Programa</strong>ção inteira: variáveis <strong>de</strong> <strong>de</strong>cisão pertencem ao campo dos números inteiros.<strong>Programa</strong>ção mista: é uma combinação da programação inteira com as <strong>de</strong>mais. Por exemplo,no problema <strong>de</strong> projeto <strong>de</strong> trocadores <strong>de</strong> calor as variáveis <strong>de</strong> <strong>de</strong>cisão po<strong>de</strong>riam ser astemperaturas das correntes (campo real) e os tipos <strong>de</strong> trocadores existentes (campo inteiro).g(x):Seja o problema <strong>de</strong> otimização sujeito a restrições <strong>de</strong> igualda<strong>de</strong>, h(x), e <strong>de</strong>sigualda<strong>de</strong>,min S(x)sujeito a:h j (x) = 0 , j = 1, 2, ..., mg j (x) 0 , j = 1, 2, ..., px X non<strong>de</strong> S(x), g(x), e h(x) C 2 . O conjunto <strong>de</strong> todos os pontos viáveis é <strong>de</strong>finido por:K = {x X n / h(x) = 0, g(x) 0}Uma restrição <strong>de</strong> <strong>de</strong>sigualda<strong>de</strong> g j (x) é chamada <strong>de</strong> ativa em um ponto viável x seg j ( x ) = 0, caso contrário ela é uma restrição inativa. As restrições ativas restringem a região<strong>de</strong> viabilida<strong>de</strong>, enquanto que as inativas não impõem restrição alguma na vizinhança do pontox , <strong>de</strong>finida pela hiperesfera <strong>de</strong> raio em torno <strong>de</strong>ste ponto, <strong>de</strong>notada por B ( x ).Um vetor d é chamado <strong>de</strong> vetor <strong>de</strong> direção viável a partir do ponto x se existe umahiperesfera <strong>de</strong> raio tal que:( x + d) {B ( x) K} para todo 0 d .O conjunto <strong>de</strong> vetores <strong>de</strong> direções viáveis a partir <strong>de</strong> x é chamado <strong>de</strong> cone <strong>de</strong> direçõesviáveis <strong>de</strong> K no ponto x . A figura abaixo ilustra estas <strong>de</strong>finições.11
Se d 0, então x <strong>de</strong>ve satisfazer as seguintes condições:d T h( x ) = 0d T 0g( x ) 0 para as g( x ) ativas, pois gx ( ) gx ( ) T gxd ( ) 0e se d T S( x ) < 0, então d é uma direção viável e promissora, isto é,S( x + d) < S( x ) para todo 0 , pois S( x) S( x) S( x) d 0 .dTSe x = x* é um ponto <strong>de</strong> mínimo local do problema, então para um suficientementepequeno, tem-se:S(x*) S(x* + d).A idéia chave para <strong>de</strong>senvolver as condições necessárias e suficientes para umproblema <strong>de</strong> otimização com restrições é transformá-lo em um problema <strong>de</strong> otimização semrestrições e aplicar as condições para este caso. Uma forma <strong>de</strong> fazer esta transformação éatravés da introdução <strong>de</strong> uma função auxiliar, chamada <strong>de</strong> função <strong>de</strong> Lagrange, L(x, , ),<strong>de</strong>finida como:L(x, , ) = S(x) + T h(x) + T g(x) , 0on<strong>de</strong> e são os multiplicadores <strong>de</strong> Lagrange associados com as restrições <strong>de</strong> igualda<strong>de</strong> e<strong>de</strong>sigualda<strong>de</strong>, respectivamente ( são também conhecidos como multiplicadores <strong>de</strong> Kuhn-Tucker). Deste modo, o problema transformado torna-se:max, 0minxL(x, , )on<strong>de</strong> os multiplicadores associados com as restrições <strong>de</strong> igualda<strong>de</strong>, h(x) = 0, assumemsinais positivos quando h(x) 0 e negativos quando h(x) 0. No ponto ótimo tem-se:L(x*, *, *) = S(x*)12
Cada multiplicador <strong>de</strong> Lagrange indica o quão sensível é a função objetivo em relaçãoà restrição associada. Por exemplo, se as restrições <strong>de</strong> igualda<strong>de</strong> são perturbadas por um vetorb, isto é, h b (x) = b, então: b S(x*) = *.Note que neste caso a função <strong>de</strong> Lagrange tem a forma:L(x, ) = S(x) + T [h b (x) b]e sua sensibilida<strong>de</strong> em relação ao parâmetro b é dada por: T b T x T b b L = x [ x S(x) + h b (x) ] + [h b (x) b] Como os termos entre colchetes da expressão acima <strong>de</strong>vem ser nulos no ponto ótimo(condição necessária <strong>de</strong> primeira or<strong>de</strong>m), então: b L(x*, *) = * e b S(x*) = *pois b L(x*, *) = b S(x*) + T b [h b (x*) b] + T b h b (x*) * * ,h b (x) = b e b h b (x) = IPortanto, o valor <strong>de</strong> S(x) aumenta ou diminui a partir <strong>de</strong> S(x*) com um aumento oudiminuição em b, <strong>de</strong>pen<strong>de</strong>ndo do sinal <strong>de</strong> *. Por isso, os multiplicadores <strong>de</strong> Lagrange sãotambém conhecidos como “shadow prices” ou “custos marginais” das restrições, porque amudança no valor ótimo da função objetivo por unida<strong>de</strong> <strong>de</strong> acréscimo no lado direito darestrição <strong>de</strong> igualda<strong>de</strong> é dado por *.Exemplo 5: Seja o seguinte problema <strong>de</strong> otimização com restriçãomin S(x) = (x 1 5) 2 + (x 2 5) 2sujeito a: h(x) = x 1 x 2 = 0Introduzindo uma perturbação na restrição <strong>de</strong> igualda<strong>de</strong> do tipo: x 1 x 2 = b, então a função <strong>de</strong>Lagrange toma a forma:L(x, ) = (x 1 5) 2 + (x 2 5) 2 + (x 1 x 2 b)cujo gradiente nulo com relação a x 1 , x 2 e leva ao seguinte sistema <strong>de</strong> equações:2 (x 1 5) + = 02 (x 2 5) = 0x 1 x 2 b = 0resultando na solução ótima: x 1 * = 5 + b / 2, x 2 * = 5 b / 2 e * = b.Deste modo S(x*) = b 2 / 2 e b S(x*) = b = *.13
Para enten<strong>de</strong>r a origem da função <strong>de</strong> Lagrange, o ótimo do exemplo acima <strong>de</strong>vesatisfazer as seguintes condições:SdS = x 1 +x 1Sx 2 = 0x 2dh =hx1 +x 1hx2 = 0x 2Se S(x) fosse uma função sem restrição, então as suas duas <strong>de</strong>rivadas parciais seriam nulas noponto ótimo e dS(x*) seria nulo para quaisquer valores das variações x 1 e x 2 . Entretanto,como as variáveis x 1 e x 2 estão restritas (x 1 e x 2 não são in<strong>de</strong>pen<strong>de</strong>ntes), as duas <strong>de</strong>rivadasparciais <strong>de</strong> S(x) não po<strong>de</strong>m ser arbitrariamente igualadas a zero. Contudo, S(x) <strong>de</strong>ve ser umextremo no ponto ótimo e portanto dS(x*) = 0. A segunda condição, dh(x*) = 0, existe porqueh(x) = 0. Para se obter uma solução (x 1 e x 2 ) não trivial do sistema <strong>de</strong> equações acima, amatriz dos coeficientes do sistema: SSx1 x2 hhx1x2<strong>de</strong>ve ter <strong>de</strong>terminante nulo, ou seja, as linhas da matriz são linearmente <strong>de</strong>pen<strong>de</strong>ntes:Sx 1h+ x 1= 0 eSx 2h+ Então, <strong>de</strong>finindo uma função auxiliar: L(x, ) = S(x) + T h(x)as condições acima são satisfeitas se: x L(x, ) = 0. Para que a restrição <strong>de</strong> igualda<strong>de</strong>, h(x) =0, seja também satisfeita é necessário que L(x, ) = 0. Portanto, no ponto ótimo énecessário que L(x*, *) = 0.A existência dos multiplicadores <strong>de</strong> Lagrange <strong>de</strong>pen<strong>de</strong> da forma das restrições, eestará garantida se e somente se os gradientes das restrições <strong>de</strong> <strong>de</strong>sigualda<strong>de</strong> ativas, g j (x*), edas restrições <strong>de</strong> igualda<strong>de</strong>, h(x*), forem linearmente in<strong>de</strong>pen<strong>de</strong>ntes. Por exemplo, no caso<strong>de</strong> um problema somente com restrições <strong>de</strong> igualda<strong>de</strong>, a condição necessária <strong>de</strong> primeiraor<strong>de</strong>m para L(x, ) fica: x S(x) + [ x h(x)] T = 0cuja solução para existirá somente se a matriz x h(x) possuir posto completo, m, isto é, estarcomposta por m vetores linearmente in<strong>de</strong>pen<strong>de</strong>ntes.• Condição necessária <strong>de</strong> primeira or<strong>de</strong>m <strong>de</strong> Karush-Kuhn-Tucker (KKT):x 2= 014
Para que x* seja um ótimo local do problema com restrições, com S(x), g(x), e h(x)diferenciáveis em x*, é necessário que:os gradientes das restrições <strong>de</strong> <strong>de</strong>sigualda<strong>de</strong> ativas, g j (x*), e das restrições <strong>de</strong> igualda<strong>de</strong>,h(x*), sejam linearmente in<strong>de</strong>pen<strong>de</strong>ntes (qualificação <strong>de</strong> segunda or<strong>de</strong>m das restrições), eque as seguintes condições sejam satisfeitas: x L(x*, *, *) = S(x*) + (*) T h(x*) + (*) T g(x*) = 0h(x*) = 0g(x*) 0 j * g j (x*) = 0 , j = 1, 2, ..., p (condições <strong>de</strong> complementarida<strong>de</strong>)* 0A condição <strong>de</strong> in<strong>de</strong>pendência linear po<strong>de</strong> ser relaxada por outras qualificações <strong>de</strong>primeira e segunda or<strong>de</strong>ns das restrições (Floudas, 1995, pg. 59 e 64).A condição do gradiente nulo, x L(x*, *, *) = 0, implica em:(*) T h(x*) + (*) T g(x*) = S(x*)que interpretada graficamente, figura abaixo, mostra que o vetor S(x*) pertence ao conedas direções viáveis, formado pelos gradientes das restrições <strong>de</strong> igualda<strong>de</strong> e <strong>de</strong>sigualda<strong>de</strong>ativas (uma vez que * j = 0 para as restrições inativas).15
Supondo que S(x*) caia fora do cone das direções viáveis, então haveria umadireção d tal que d T S(x*) < 0, d T g(x*) 0 e d T h(x*) = 0, isto é, existiria um pontomelhor que x*, como ilustra a figura abaixo.• Condição necessária <strong>de</strong> segunda or<strong>de</strong>m <strong>de</strong> KKT:Para que x* seja um mínimo local do problema com restrições, com S(x), g(x), e h(x)duas vezes diferenciáveis em x*, é necessário que:a condição <strong>de</strong> primeira or<strong>de</strong>m <strong>de</strong> KKT seja satisfeita e, que a matriz Hessiana da função <strong>de</strong>Lagrange, L(x*, *, *), seja positiva semi<strong>de</strong>finida para todo vetor não nulo d tal que: 2 xd T h i (x*) = 0 , i = 1, 2, ..., md T g j (x*) = 0 para as g j (x*) ativasisto é, d T 2 x L(x*, *, *) d 0.• Condição suficiente <strong>de</strong> KKT:Para que x* seja um mínimo local do problema com restrições, com S(x), g(x), e h(x)duas vezes diferenciáveis em x*, é suficiente que:a condição <strong>de</strong> primeira or<strong>de</strong>m <strong>de</strong> KKT seja satisfeita e, que a matriz Hessiana da função <strong>de</strong>Lagrange, 2 xL(x*, *, *), seja positiva <strong>de</strong>finida para todo vetor não nulo d tal que:d T h i (x*) = 0 , i = 1, 2, ..., m16
d T g j (x*) = 0 para as g j (x*) ativas {g j (x*) = 0 e j * > 0}d T g j (x*) 0 para as g j (x*) inativas {g j (x*) < 0 e j * = 0}isto é, d T 2 x L(x*, *, *) d > 0.A positivida<strong>de</strong> da matriz Hessiana com restrição, isto é:d T 2 L(x*, *, *) d > 0 d {d / d T h i (x*) = 0, d T xg j (x*) = 0, d 0}é garantida se todas as raízes do polinômio característicop ( )2xTI MLM0 0forem positivas, on<strong>de</strong> M é a matriz formada pelos gradientes <strong>de</strong> h(x*) e g(x*) ativas, isto é, amatriz tal que d T M = 0, com m+p a < n e com posto completo (p a é o número <strong>de</strong> restrições gativas). O mesmo critério se aplica para semipositivida<strong>de</strong>, negativida<strong>de</strong> e seminegativida<strong>de</strong>,com os respectivos sinais das raízes.Uma maneira <strong>de</strong> resolver o problema <strong>de</strong> valor característico acima é usando a<strong>de</strong>composição <strong>de</strong>composição QR (ou <strong>de</strong>composição ortogonal-triangular, ou <strong>de</strong>composição<strong>de</strong> Househol<strong>de</strong>r) da matriz M (= Q R) para obter a matriz <strong>de</strong> projeção, Z T , do vetor d no subespaçonulo <strong>de</strong> M, isto é, d T M = 0, ou então a <strong>de</strong>composição em valores singulares da matrizM T (= U S V H ). A matriz Z é formada pelas últimas w colunas <strong>de</strong> Q, ou ainda pelas últimas wcolunas <strong>de</strong> V, on<strong>de</strong> w é a dimensão do espaço nulo (número <strong>de</strong> valores singulares nulos, ounúmero <strong>de</strong> linhas nulas da matriz R):Z i,j = Q i,j = V i,j i = 1,2,..., n , j = m+p a w+1,...,m+p aon<strong>de</strong> Q H RM = (Q é uma matriz unitária e Q 1 = Q H é a transposta conjugada)0Uma vez encontrada a matriz Z, obtém-se os valores característicos da matriz Hessianaprojetada neste sub-espaço: Z T 2 x L Z.Exemplo 6: Verificar as condições necessárias e suficientes para o seguinte problema (Edgar& Himmelblau, 1988 , pg. 314):min S(x) = (x 1 1) 2 +2x 22sujeito a: g 1 (x) = x 1 x 2 / 4 0Exemplo 7: Verificar as condições necessárias e suficientes para o problema com a mesmafunção objetivo do exemplo 2.4, mas usando a seguinte restrição:17
2g 2 (x) = x 1 x 2 0Exemplo 8: Verificar se o ponto x* = [1 4,9] T é um mínimo local para o seguinte problema(Edgar & Himmelblau, 1988 , pg. 316):2min S(x) = 4 x 1 x 2 122x 12x 2sujeito a: h 1 (x) = 25 = 02x 12x 2g 1 (x) = <strong>10</strong> x 1 + <strong>10</strong> x 2 + 34 0g 2 (x) = (x 1 3) 2 (x 2 1) 2 0g 3 (x) = x 1 0g 4 (x) = x 2 018
<strong>10</strong>.2.3 Convexida<strong>de</strong>Um subconjunto K <strong>de</strong> um espaço vetorial X é dito convexo se x 1 , x 2 K e 0 1: x 1 + (1 – ) x 2 Ke apresenta as seguintes proprieda<strong>de</strong>s:a) K = {x K x = y, y K } é convexo para ;b) K + L e K L são convexos para subconjunto convexo L <strong>de</strong> X.Seja K um convexo não vazio do n . A função S: K é dita convexa se x 1 , x 2 K e 0 1:S[ x 1 + (1 – ) x 2 ] S(x 1 ) + (1 – ) S(x 2 )A função S(x) é estritamente convexa se a <strong>de</strong>sigualda<strong>de</strong> for estrita. Uma função T(x) écôncava se a função S(x) = –T(x) for convexa.Sejam S(x), S i (x), i=1,2,...,n, funções convexas em um convexo não vazio K do n ,então as seguintes proprieda<strong>de</strong>s são apresentadas:a) S(x) é contínua em qualquer ponto do interior <strong>de</strong> K;b) as seções K = {x K S(x) } são conjuntos convexos;nc) S(x) = S i ( x)é uma função convexa. Se no mínimo uma S i (x) é estritamente convexa,i1então S(x) é estritamente convexa;19
d) S(x) é convexa para > 0 .e) se todas S i (x) < x K, então S(x) = max{S 1 (x), S 2 (x), ..., S n (x)} é convexa.Quando S(x) é convexa, as condições <strong>de</strong> otimalida<strong>de</strong> simplificam-se, porque ascondições <strong>de</strong> segunda or<strong>de</strong>m são equivalentes à convexida<strong>de</strong> local da função. Além disso, ummínimo local será também global e se a função for estritamente convexa o mínimo global éúnico.Para ilustrar, <strong>de</strong>fine-se y = x 1 + (1 – ) x 2 e w = S(x 1 ) + (1 – ) S(x 2 )S(x) S(x)função côncavafunção convexaS(y)wS(y)wxx 1y x 2 x 1y x 2xSeja X um conjunto aberto não vazio do n e S(x) uma função diferenciável em x o X. Se S(x) é convexa em x o , entãoS(x) S(x o ) T S(x o )(x x o )Para uma função S(x) diferenciável em X,S(x) é convexa S(x 2 ) S(x 1 ) T S(x 1 )(x 2 x 1 ) x 1 , x 2 X.Seja X um conjunto aberto não vazio do n e S(x) uma função duas vezesdiferenciável em x o X. Se S(x) é convexa em x o , então 2 S(x o ) é positiva semi<strong>de</strong>finida. Parauma função S(x) duas vezes diferenciável em X,S(x) é convexa 2 S(x) é positiva semi<strong>de</strong>finida x X.Seja K um conjunto convexo não vazio do n , x o K e d um vetor não nulo tal que(x o + d) K para um > 0 suficientemente pequeno. Então, a <strong>de</strong>rivada direcional <strong>de</strong> S(x)no ponto x o , ao longo da direção , <strong>de</strong>notada por S´(x o ,d), é <strong>de</strong>finida pelo seguinte limite(incluindo ):( o ) ( o)( oSx dSxS x , d) lim lim T 2 S( xo) d dTS( xo)d0 0Portanto, a <strong>de</strong>rivada direcional no ponto x o é dada por S´( x o ,d) = T S(x o ) d.Seja K um conjunto convexo não vazio do n e S(x) uma função convexa. Então, osub-gradiente <strong>de</strong> S(x) no ponto x o K, <strong>de</strong>notado por d, é <strong>de</strong>finido como:20
S(x) S(x o ) + d T (x x o ) , x KIsto é, a aproximação linear com o uso do vetor d sempre resulta em uma sub-estimativa <strong>de</strong>S(x).Generalização <strong>de</strong> funções convexasPara generalizar a <strong>de</strong>finição <strong>de</strong> funções convexas é necessário <strong>de</strong>finir a continuida<strong>de</strong><strong>de</strong> funções escalares multivariáveis.Sejam X n , x o X, e S(x): X .S(x) é contínua em x o se:para cada > 0 existir () tal que ||x x o || < |S(x) S(x o )| < , oupara cada seqüência x 1 , x 2 , ..., x m em X convergindo para x o :lim S(xmm) S lim x mm S(xS(x) é contínua em X se ela for contínua para todo x o X.S(x) é semicontínua inferior em x o se:para cada > 0 existir () tal que ||x x o || < < S(x) S(x o ), oupara cada seqüência x 1 , x 2 , ..., x m em X convergindo para x o :mlim inf S(xmm) S lim x m1 2 mon<strong>de</strong> lim inf S(x ) lim min{ S(x ), S(x ),..., S(x )}.mmmo) . S(xS(x) é semicontínua inferior em X se ela for semicontínua inferior para todo x o X.o) ,função semicontínua inferiorfunção semicontínua superiorS(x) é semicontínua superior em x o se:21
para cada > 0 existir () tal que ||x x o || < S(x) S(x o ) < , oupara cada seqüência x 1 , x 2 , ..., x m em X convergindo para x o :mlim sup S(xmm) S lim x mon<strong>de</strong> lim sup S(x ) lim max{ S(x ), S(x ),..., S(x )}.mmm1 2 m S(xS(x) é semicontínua superior em X se ela for semicontínua superior para todo x o X.o) ,Seja K um convexo não vazio do n . A função S: K é dita quasi-convexa se x 1 ,x 2 K e 0 1:S[ x 1 + (1 – ) x 2 ] max{S(x 1 ), S(x 2 )}A função S(x) é estritamente quasi-convexa se a <strong>de</strong>sigualda<strong>de</strong> for estrita quando S(x 1 ) S(x 2 ).Uma função T(x) é (estritamente) quasi-côncava se a função S(x) = –T(x) for (estritamente)quasi-convexa. Um mínimo local <strong>de</strong> uma função estritamente quasi-convexa será tambémglobal.Função quasi-convexaFunção estritamente quasi-convexaDefinindo as seções K = {x K S(x) }, então:S(x) é quasi-convexa K é convexo .Seja S(x) uma função semicontínua inferior no convexo K n . Se S(x) é estritamentequasi-convexa em K, então S(x) é quasi-convexa, mas o converso não é verda<strong>de</strong>iro.A soma <strong>de</strong> funções quasi-convexas não é necessariamente uma função quasi-convexa,proprieda<strong>de</strong> válida para funções convexas. Por outro lado, o recíproco <strong>de</strong> uma função quasiconvexa,1/S(x), é uma função quasi-côncava, mas o recíproco <strong>de</strong> uma função convexa não é22
necessariamente uma função côncava (já o recíproco <strong>de</strong> uma função côncava positiva é umafunção convexa). Por exemplo, S(x) = e x é convexa e 1/S(x) é convexa também.então:Seja S(x) uma função diferenciável em um conjunto convexo aberto não vazio K n ,S(x) é quasi-convexa S(x 2 ) S(x 1 ) T S(x 1 )(x 2 x 1 ) 0 x 1 , x 2 K.Seja S(x) uma função quasi-côncava duas vezes diferenciável em um conjuntoconvexo aberto não vazio K n , então uma direção, d, ortogonal ao S(x) exibe asseguintes proprieda<strong>de</strong>s:a) se x o K, d n e d T S(x o ) = 0, então d T 2 S(x o ) d 0;b) a matriz Hessiana <strong>de</strong> S(x) tem no máximo um valor característico positivo x K. Isto é,a generalização da concavida<strong>de</strong> <strong>de</strong> funções (para quasi-côncavida<strong>de</strong>) é equivalente àexistência <strong>de</strong> no máximo um valor característico positivo da Hessiana.Seja S(x) uma função diferenciável em um conjunto aberto não vazio X n .S(x) é pseudo-convexa se S(x 2 ) < S(x 1 ) T S(x 1 )(x 2 x 1 ) < 0 x 1 , x 2 X.Uma função T(x) é pseudo-côncava se a função S(x) = –T(x) for pseudo-convexa. Orecíproco <strong>de</strong> uma função pseudo-côncava, 1/S(x), é uma função pseudo-cônvexa. As seguintesrelações são válidas:a) uma função convexa diferenciável é pseudo-convexa;b) uma função convexa é estritamente quasi-convexa;c) uma função convexa é quasi-convexa;d) uma função pseudo-convexa é estritamente quasi-convexa;e) uma função estritamente quasi-convexa e semicontínua inferior é quasi-convexa.<strong>10</strong>.2.4 Formas funcionaisO método empregado para solucionar um problema <strong>de</strong> otimização <strong>de</strong>pen<strong>de</strong>,fundamentalmente, da forma da função objetivo e <strong>de</strong> suas restrições. Com relação a funçãoobjetivo tem-se:função linear: Sx ( ) ac x acxTni1iicomo neste caso S(x) = c 0 x, a função S(x) não apresenta pontos <strong>de</strong> máximo oumínimo. Para este tipo <strong>de</strong> função objetivo, só faz sentido a existência <strong>de</strong> um problema <strong>de</strong>otimização com restrição, cuja solução, se existir, estará localizada em algum ponto dafronteira da região <strong>de</strong> busca.23
T 1 T1função quadrática: Sx ( ) acx x Ax acx i i aijxix22ni1 i1j1como x T A x é um escalar x T A x = [x T A x] T = x T A T x,T 1 T T T T 1 T tem-se que: x A x ( x A xx A x) x AA x2( )2 ,1então <strong>de</strong>finindo QAA T2 ( ), que é uma matriz simétrica: Q = QT ,resulta em: x T A x = x T Q x, isto é:T 1 T1Sx ( ) ac x x Qx acx i i qijxix22ni1 i1j1nnnnjje portanto: n nS 1 xSxc q x x x x xi( )kij j i k 2 i 1 j 1 k xjk ,mas como xxik ik0 1, i k, i k n n1, tem-se: Sx ( ) ck ( qkj xj qik xi) 2 i1j1e sabendo que a matriz Q é simétrica:nSx ( ) ck qik xi c Qx i1eH(x) = 2 S(x) = Qcom isto, a condição necessária <strong>de</strong> primeira or<strong>de</strong>m, S(x*) = 0, para este tipo <strong>de</strong> funçãoresulta em:Q x* = c ou <strong>de</strong> forma similar (x*) T Q = c TeT 1 T 1 TSx ( *) ac x* ( x*) Qx* acx*22Subtraindo S(x*) da função S(x) tem-se:Sx Sx c T 1( ) ( *) ( xx*) x T Qx( x*) T Qx*2como c T = (x*) T Q,24
1Sx ( ) Sx ( *) x T Qx( x*) T Qx* ( x*) T Q( xx*) ( x*) T Q( xx*)21Sx ( ) Sx ( *) x T Qx( x*) T Qx( x*) T Q( xx*)21TTSx ( ) Sx ( *) ( xx*) Qx( x*) Q( xx*)21Sx ( ) Sx ( *) ( xx*) T Q( xx*)2função não linear: S(x): n a expansão em série <strong>de</strong> Taylor <strong>de</strong> S(x) em torno <strong>de</strong> um ponto x o é dada por:T1 T 2Sx ( ) Sx ( 0) Sx ( 0)( xx0) ( xx0) Sx ( 0)( xx0)2No caso particular <strong>de</strong> x o = x*, tem-se S(x*) = 0 e:1Sx ( ) Sx ( *) ( xx*) T Hx ( *)( xx*)2SSe S(x) for duas vezes diferenciável em x*, então Hx ( *) xix2jx*é simétrica.Portanto, tanto no caso <strong>de</strong> função quadrática, on<strong>de</strong> H(x*) = Q, quanto no caso geral <strong>de</strong> funçãonão-linear, a matriz Hessiana fornece as características do(s) ponto(s) ótimo(s) <strong>de</strong> S(x).Algumas observações adicionais:1) no caso <strong>de</strong> S(x) ser uma função quadrática, o ponto ótimo é global;2) se H(x*) é positiva <strong>de</strong>finida, então S(x) é estritamente convexa na vizinhança <strong>de</strong> x* (ou xno caso da função quadrática);3) se H(x*) é positiva semi<strong>de</strong>finida, então S(x) é convexa na vizinhança <strong>de</strong> x* (ou x no casoda função quadrática)..4) se H(x*) é negativa <strong>de</strong>finida, então S(x) é estritamente côncava na vizinhança <strong>de</strong> x* (ou x no caso da função quadrática);5) se H(x*) é negativa semi<strong>de</strong>finida, então S(x) é côncava na vizinhança <strong>de</strong> x* (ou x nocaso da função quadrática).25
função mista linear e inteira: S(x, y) = c T x + d T y , x X ne y Yon<strong>de</strong> y é um vetor <strong>de</strong> variáveis inteiras <strong>de</strong> dimensão q, Y q , ou um vetor <strong>de</strong> variáveisbinárias <strong>de</strong> dimensão q, Y = {0, 1} q . Como a função é linear, só faz sentido a existência <strong>de</strong> umproblema <strong>de</strong> otimização com restrição.função mista não linear e inteira: S(x, y): X Y Problemas <strong>de</strong> otimização mista não linear e inteira apresentam gran<strong>de</strong>s <strong>de</strong>safios e dificulda<strong>de</strong>sassociados com o caráter combinatorial do domínio discreto (inteiro) junto com ascomumente encontradas não convexida<strong>de</strong>s e não linearida<strong>de</strong>s do domínio contínuo.função unimodal: é a função que apresenta apenas um extremo.função multimodal: é a função que apresenta mais <strong>de</strong> um extremo.NOTA: toda função côncava ou convexa é unimodal, mas nem toda função unimodal énecessariamente côncava ou convexa. Veja exemplo S(x) = (x 2 – 1) 3 .<strong>10</strong>.2.5 Álgebra vetorialSejam x e y X n , A e B nn , S(x): X , g(x) e h(x): X X. Então asseguintes regras <strong>de</strong> diferenciação se aplicam:[g(x) T h(x)] = T g(x) h(x) + T h(x) g(x)[S(x) g(x)] = g(x) T S(x) + S(x) g(x)(A x) = A(x T A) = A(x T A x) = (A + A T ) xS[g(x)] = T g(x) g S(g)S{g[h(x)]} = T h(x) T h g(h) g S(g)g[h(x)] = h g(h) h(x)Td(x y)dt xTy xTyd(A x)dtAx A x26
d(A B) AB A BdtTd(x A x) xdtTA x xTAx xTA xExercícios <strong>de</strong> fixação1. Teste as condições necessárias e suficientes do problema abaixo.min S(x) = x 1 x 221 122sujeito a: g ( x) x x25 02. Determine se as funções abaixo são côncavas, convexas, estritas ou não, ou nenhum<strong>de</strong>stes casos ?a) S(x) = 2 x 1 + 3 x 2 + 6b) S(x) =21 3 x1x2 22 xx223 21 2 3 1 2 c) S(x) = x x x 8 x 23. Verifique se as restrições abaixo, <strong>de</strong>finindo uma região fechada, formam uma regiãoconvexa.2g 1 (x) = x 1 + x 2 1 e g 2 (x) = x 2 x 1 2NOTA: se todas as restrições colocadas na forma g i (x) 0 são funções convexas (ou na formag i (x) 0 são funções côncavas), então elas formam uma região convexa. Funções lineares sãotanto convexas quanto côncavas.4. Mostre que a função S(x) = x 1 x 2 com x 1 0 e x 2 0 é quasi-convexa. Ela é tambémconvexa ? Por quê ?25. Mostre que a função S(x) = x1 5 x1x2 3 x2com x 1 > 0 e x 2 > 0 é pseudo-convexa.Ela é também convexa ? Por quê ?227
<strong>10</strong>.3 Otimização DinâmicaExemplo 9: Para ilustrar o problema <strong>de</strong> otimização dinâmica, algumas vezes chamado <strong>de</strong>otimização em dimensão infinita, pois envolve variáveis <strong>de</strong> <strong>de</strong>cisão que são funções,consi<strong>de</strong>re o sistema abaixo <strong>de</strong> um reator semi-batelada, com duas reações exotérmicas:on<strong>de</strong> C é o produto <strong>de</strong> interesse e D é um sub-produto. Iniciando com o reator vazio, asalimentações <strong>de</strong> A e B, bem com a taxa <strong>de</strong> água <strong>de</strong> resfriamento, estão livres para variar aolongo da operação. Para um dado reator, com dimensões fixas, o objetivo operacional po<strong>de</strong>ser o <strong>de</strong> <strong>de</strong>terminar o tempo <strong>de</strong> duração da operação e as taxas <strong>de</strong> alimentação <strong>de</strong> reagentes eágua, <strong>de</strong> modo a maximizar a concentração final <strong>de</strong> C. O projeto do equipamento tambémpo<strong>de</strong> ser parte do objetivo do problema. Geralmente, quando as variáveis <strong>de</strong> <strong>de</strong>cisãoenvolvem somente variáveis operacionais, o problema é <strong>de</strong>nominado <strong>de</strong> controle ótimo.por:A formulação matemática do processo acima po<strong>de</strong> ser genericamente representadaF(x(t), x(t) ,y(t),u(t),v) = 0on<strong>de</strong> x(t), x(t) são as variáveis diferenciais e suas <strong>de</strong>rivadas em relação a variávelin<strong>de</strong>pen<strong>de</strong>nte, t (geralmente o tempo), y(t) são as variáveis algébricas, u(t) são as variáveis <strong>de</strong>controle e v são os parâmetros invariantes no tempo, a serem <strong>de</strong>terminados pela otimização.Para o exemplo, u(t) representa as taxas <strong>de</strong> alimentação dos reagentes e da água <strong>de</strong>refrigeração e v po<strong>de</strong> ser o volume do reator. As condições iniciais para este problema po<strong>de</strong>mser <strong>de</strong>scritas genericamente por:I(x(0), x(0) ,y(0),u(0),v) = 0que juntamente com a forma funcional <strong>de</strong> u(t) e os valores <strong>de</strong> v <strong>de</strong>terminam completamente aresposta transiente do sistema.28
<strong>10</strong>.3.1 Formulação da função objetivo e restriçõesA formulação da função objetivo para um problema <strong>de</strong> otimização dinâmica po<strong>de</strong> estarassociada a <strong>de</strong>terminação dos seguintes valores:horizonte <strong>de</strong> tempo da operação, t f (tempo final); parâmetros invariantes no tempo, v; variação temporal das variáveis <strong>de</strong> controle, u(t), para t [0, t f ].<strong>de</strong> modo a minimizar (ou maximizar) um funcional (u(t),v,t f ). A função objetivo é umfuncional pois <strong>de</strong>pen<strong>de</strong> da escolha da função u(t). No problema do reator semi-batelada seria a concentração final do produto C e t f seria a duração da batelada, resultando noproblema <strong>de</strong> otimização abaixo:on<strong>de</strong> x 3 é a concentração <strong>de</strong> C.fmaxt , v,u(t),t[0,t = x 3 (t f )]t f(u(t),v,t f ) = (x(t), x(t) ,y(t),u(t),v) dtfsujeito a: F(x(t), x(t) ,y(t),u(t),v) = 0I(x(0), x(0) ,y(0),u(0),v) = 0Se a função objetivo a ser minimizada for a integral <strong>de</strong> uma função sobre todo ointervalo [0, t f ]:0po<strong>de</strong>-se adicionar ao sistema <strong>de</strong> equações algébrico-diferenciais do problema, a seguinteequação: = (x(t), x(t) ,y(t),u(t),v)com a condição inicial (0) = 0, para ser integrada simultaneamente. Para o caso particular <strong>de</strong> = 1, tem-se o problema <strong>de</strong> minimização do tempo <strong>de</strong> operação, t f .seja:Uma formulação mais geral para a função objetivo envolve as duas formas acima, out f(u(t),v,t f ) = (x(t f ), x ( t f) ,y(t f ),u(t f ),v) + (x(t), x(t) ,y(t),u(t),v) dt0Dentre as mais variadas formas <strong>de</strong> restrições adicionais em um problema <strong>de</strong>otimização dinâmica, tem-se:a) Limites nas variáveis <strong>de</strong> <strong>de</strong>cisãot min maxf t f t f29
u min u(t) u max , t [0, t f ]v min v v maxb) Restrições terminais<strong>de</strong> igualda<strong>de</strong>: w(t f ) = w*<strong>de</strong> <strong>de</strong>sigualda<strong>de</strong>: w min w(t f ) w maxon<strong>de</strong> w representa alguma variável do sistema (x ou y), ou uma relação entre elas. Para oexemplo do reator, a quantida<strong>de</strong> final <strong>de</strong> material no reator po<strong>de</strong> ser fixada ou a temperaturafinal po<strong>de</strong> estar limitada em uma dada faixa.c) Restrições interioresAparecem quando algumas variáveis <strong>de</strong>vem estar limitadas em alguns pontos no interior dointervalo <strong>de</strong> operação, ou seja:w min (t I ) w(t I ) w max (t I )on<strong>de</strong> t I [0, t f ). Como por exemplo, limitar a curva <strong>de</strong> aquecimento do reator <strong>de</strong>ntro <strong>de</strong> umafaixa <strong>de</strong>terminada.d) Restrições <strong>de</strong> trajetóriaSão aquelas restrições que <strong>de</strong>vem ser satisfeitas durante todo o intervalo <strong>de</strong> operação, ou seja:w min w(t) w max , t [0, t f ]Por exemplo, no reator semi-batelada po<strong>de</strong>-se impor que a temperatura da reação não <strong>de</strong>vaultrapassar um <strong>de</strong>terminado valor para evitar a <strong>de</strong>gradação do produto.<strong>10</strong>.3.2 Princípio do Mínimo <strong>de</strong> PontryaginAntes <strong>de</strong> enunciar o princípio do mínimo <strong>de</strong> Pontryagin, é necessário introduzir osconceitos do cálculo variacional, que trata da seleção <strong>de</strong> uma função <strong>de</strong>sconhecida queaparece no integrando <strong>de</strong> uma integral que <strong>de</strong>ve ser minimizada ou maximizada em função<strong>de</strong>sta seleção.Consi<strong>de</strong>re a seguinte integral:tS(x) [t,x(t),x( t)]dt 2 t1on<strong>de</strong> x(t) é a <strong>de</strong>rivada <strong>de</strong> x(t) em relação a t. O problema do cálculo variacional consiste naseleção <strong>de</strong> x(t) <strong>de</strong> modo a minimizar (ou maximizar) o funcional S(x). Supondo que x*(t) é afunção que minimiza S(x) e x(t) é uma outra função com uma diferença infinitesimal <strong>de</strong> x*(t)em cada ponto <strong>de</strong>ntro do intervalo (t 1 , t 2 ), <strong>de</strong>fine-se:30
x = x(t) x*(t)como o operador variação, ou seja, a variação <strong>de</strong> uma função representa uma mudançainfinitesimal arbitrária na função a um dado valor <strong>de</strong> t. Note que a variação difere dadiferenciação, pois esta última correspon<strong>de</strong> a uma medida da mudança <strong>de</strong> uma funçãoresultante <strong>de</strong> uma mudança específica (não arbitrária) na variável in<strong>de</strong>pen<strong>de</strong>nte. A equaçãoacima po<strong>de</strong> ser escrita como:x = x(t) x*(t) = (t)on<strong>de</strong> (t) é uma função arbitrária contínua e diferenciável e é um parâmetro variável queten<strong>de</strong> a zero.Como o operador variação acarreta uma mudança infinitesimal em uma função paraum valor fixo <strong>de</strong> t, tem-se:t = 0ou seja, a variável in<strong>de</strong>pen<strong>de</strong>nte não participa do processo <strong>de</strong> variação. Outra proprieda<strong>de</strong>importante do operador variação é a comutativida<strong>de</strong> com os operadores <strong>de</strong> diferenciação eintegração:d dddx dx dx * ddx [ (t)] e ( x x*) dt dtdt dt dt dt dtdtt2t1x ( t)dt t2t1x(t)dt t2t1x *( t)dt t2t1[ x(t) x *( t)]dt t2t1x(t)dtComo a condição necessária <strong>de</strong> primeira or<strong>de</strong>m para o mínimo local <strong>de</strong> uma função,S(x), po<strong>de</strong> ser interpretada como a existência <strong>de</strong> um ponto estacionário da função objetivo,então <strong>de</strong>ntro <strong>de</strong> uma região infinitesimal em torno <strong>de</strong>ste ponto tem-se que:S = 0Usando a proprieda<strong>de</strong> comutativa chega-se a:t2S dtt1on<strong>de</strong> = [x, x (t) ,t] [x*, x * ( t),t] = [x* + , x *(t)+ (t),t] [x*, x *(t),t].Expandindo em série <strong>de</strong> Taylor tem-se:[x* + (t), x * ( t)+ (t), t] = [x*, x * ( t), t] + [x*, x * ( t), t] (t) +que eliminando os termos <strong>de</strong> or<strong>de</strong>m O( 2 ), resulta em:TxTx = { [x*, x * ( t), t] (t) + [x*, x * ( t) , t] (t)}Tx [x*, x * ( t), t] (t)+ O[ 2 2 (t), 2 2 ( t)]Tx31
Para um ponto estacionário tem-se:tS 2t1Tx Tx dt 0sobre qualquer função arbitrária (t). O segundo termo no integrando po<strong>de</strong> ser integrado porpartes (u = x e v = ), resultando em:t2t1Tx dt [ Tx tt ]21t2t1ddt[ Tx ] dtSe a função x(t) é fixada nos contornos, t 1 e t 2 , então (t) <strong>de</strong>ve se anular nestes pontos, poisnão po<strong>de</strong> existir variação <strong>de</strong> x(t) nos contornos. Deste modo o primeiro termo da integraçãopor partes é nulo. Para o caso mais geral, on<strong>de</strong> algum contorno po<strong>de</strong> estar livre, as seguintescondições <strong>de</strong> complementarida<strong>de</strong> <strong>de</strong>vem ser satisfeitas: T x 0 para t = t 1 e t = t 2ou seja, se S é para ser zero para todas as variações admissíveis (restritas somente pelacontinuida<strong>de</strong> e diferenciabilida<strong>de</strong>) então o primeiro termo da integração por partes <strong>de</strong>ve sersempre nulo. No caso <strong>de</strong> existir uma contribuição terminal na função objetivo:S x) [ x(t ), t ] [ t,x(t),x( t)]dt2( 2 2a condição <strong>de</strong> complementarida<strong>de</strong> terminal seria:T T[ x x ] 0 para t = t 2Substituindo a integração por partes em S = 0, tem-se então:t2T d TS x [ x t dt1tt1] dt 0Como a equação acima <strong>de</strong>ve ser satisfeita para qualquer função arbitrária (t), contínua,diferenciável e que satisfaça as condições <strong>de</strong> contorno, então o termo entre parêntesis <strong>de</strong>ve sernulo, resultando na equação <strong>de</strong> Euler-Lagrange:x ddt[ ] 0xExemplo <strong>10</strong>: Para ilustrar, consi<strong>de</strong>re o problema <strong>de</strong> <strong>de</strong>terminar a curva <strong>de</strong> menorcomprimento conectando dois pontos no espaço, conforme a figura abaixo.32
O comprimento <strong>de</strong> uma curva conectando os pontos (t 1 , x 1 ) e (t 2 , x 2 ) é dado por:s(t2S(x) ds 1x1)s(t )tt212dton<strong>de</strong> [ t,x(t),x( t)] 1xeinfinitesimal da curva.222ds dt dx que é o comprimento <strong>de</strong> um segmentoAplicando a equação <strong>de</strong> Euler-Lagrange para o problema acima, tem-se: x 0x x x x21xx ou seja:ddt[ x] 0 x 21 xddt xddtx1x2 0 constante, o que implica quex * ( t)= constante. Portanto, como nãopo<strong>de</strong>ria <strong>de</strong>ixar <strong>de</strong> ser, o caminho mais curto entre dois pontos é uma reta: x*(t) = a t + b.Naturalmente, para assegurar que a função x(t) minimize o funcional S(x), a condiçãosuficiente <strong>de</strong> segunda or<strong>de</strong>m <strong>de</strong>ve ser verificada, que no caso <strong>de</strong> variações significa que asegunda variação <strong>de</strong> S <strong>de</strong>ve ser positiva para todas variações possíveis <strong>de</strong> x, isto é:que é equivalente a (x) TLegendre:2 xS 2 S > 0 , x(x*) x > 0, ou ainda pela condição <strong>de</strong> segunda or<strong>de</strong>m <strong>de</strong>2 x( x*,x*, t)> 033
Aplicando esta condição para o exemplo acima tem-se:2 1 x 2(1 x)3/ 2 0logo, a solução ótima x*(t) minimiza o funcional S(x).Retornando ao problema <strong>de</strong> otimização <strong>de</strong> sistema dinâmicos, seja então o problema:t fmin, x(t),u(t),t[0,tf][x(t),u(t),t f ] = [x(t f ),t f ] +tf 0[x(t),u(t),t] dtsujeito a:x(t)= f[x(t),u(t),t] , x(0) = x oh[(t f ),t f ] = 0Introduzindo os multiplicadores <strong>de</strong> Lagrange associado às restrições chega-se a:L[x(t),u(t),(t),,t f ] = [x(t f ),t f ] + T h[x(t f ),t f ] +que po<strong>de</strong> ser dividida em duas funções:[x(t f ),,t f ] = [x(t f ),t f ] + T h[x(t f ),t f ] et f{ [x(t),u(t),t] + T (t) (f[x(t),u(t),t] x(t) )} dt0[x(t),u(t),(t),t] = [x(t),u(t),t] + T (t) (f[x(t),u(t),t] x(t) )resultando no funcional:L[x(t),u(t),(t),,t f ] = [x(t f ),,t f ] +t f 0que ao ser minimizado resulta nas equações <strong>de</strong> Euler-Lagrange:dT x [ x ] 0 x x fdton<strong>de</strong> ddt[ ] 0 cte[x(t),u(t),(t),t] dt (t) = u(t), e pelas condições <strong>de</strong> complementarida<strong>de</strong> para t ) :T[ ]f 0 0 0 para t = t fpois (t f ) é livre ( f 0) e não <strong>de</strong>pen<strong>de</strong> <strong>de</strong> , chega-se a 0 t, ou seja:( f 0 T f u TufDefinindo a seguinte função <strong>de</strong> Hamilton (ou Hamiltoniano):H[x(t),u(t),(t),t] = [x(t),u(t),t] + T (t) f[x(t),u(t),t]34
então, as condições necessárias <strong>de</strong> primeira or<strong>de</strong>m (Euler-Lagrange) <strong>de</strong>scritas acima sãoequivalentes a:x H fxH x Txf uH u Tuf 0que <strong>de</strong>vem ser resolvidas juntamente com as condições iniciais e finais e as condições <strong>de</strong>complementarida<strong>de</strong>:x(0) = x oh[x(t f ),t f ] = 0[ x t (t f )] T x(t f ) = 0 )( f{H[x(t f ),u(t f ),(t f ),t f ] + ft } t f = 0A condição <strong>de</strong> segunda or<strong>de</strong>m po<strong>de</strong> ser verificada pela positivida<strong>de</strong> <strong>de</strong> 2 u H . Este conjunto<strong>de</strong> condições são conhecidos como Princípio do Mínimo <strong>de</strong> Pontryagin (1962), e osmultiplicadores <strong>de</strong> Lagrange, (t), são conhecidos como variáveis adjuntas. Para as partes docaminho u(t) sobre as restrições u min ou u max , vale a seguinte condição <strong>de</strong> otimalida<strong>de</strong>, nolugar <strong>de</strong> H 0 :upara todos as possíveis funções u(t).H[x*(t),u*(t),*(t),t] H[x*(t),u(t),*(t),t]Para problemas com restrições <strong>de</strong> <strong>de</strong>sigualda<strong>de</strong> do tipo:g[x(t),u(t),t] 0 , t [0, t f ]on<strong>de</strong> g p é duas vezes continuamente diferenciável e o subconjunto <strong>de</strong> restrições ativas,g a , não <strong>de</strong>ve ser maior que o número <strong>de</strong> variáveis <strong>de</strong> controle, u, e <strong>de</strong>ve apresentar umamatriz Jacobiana, u g a , <strong>de</strong> posto completo t [0, t f ]. Exemplos <strong>de</strong> restrições <strong>de</strong><strong>de</strong>sigualda<strong>de</strong> que satisfazem estas condições são:u min u(t) u max , t [0, t f ]u min [x(t),t] u(t) u max [x(t),t] , t [0, t f ]|u(t)| u m , t [0, t f ]||u(t)|| 2 r 2, t [0, t f ] , r Introduzindo funções <strong>de</strong> folga z(t) , isto é:g i [x(t),u(t),t] + ( ) = 0 , i = 1,2,...,pz 2 it35
tem-se o integrando da função <strong>de</strong> Lagrange na forma:[x(t),u(t),(t),t] = [x(t),u(t),t] + T (t) (f[x(t),u(t),t] x (t) ) + T (t) (g[x(t),u(t),t] + z 2 ( t))on<strong>de</strong> o vetor z 2 ( t)= [... ( ) ...] T . Neste caso as equações <strong>de</strong> Euler-Lagrange são dadas por:d [ x]dtx0 zddtddt[ ] 0 z 2 itx Txf cte[ ] 0 ctezzTxg De modo análogo às condições <strong>de</strong> complementarida<strong>de</strong> para (t), que resultam em 0 t, para a função z(t) tem-se:T[ z z ]zf 0 z z 0 z 0 para t = t flogo, 0 t e, pela <strong>de</strong>finição <strong>de</strong> , i z = 0, ou ainda i g i = 0, i = 1,2,...,p. zDefinindo o Hamiltoniano para este caso:iH[x(t),u(t),(t),t] = [x(t),u(t),t] + T (t) f[x(t),u(t),t] + T (t) g[x(t),u(t),t]então o Princípio do Mínimo <strong>de</strong> Pontryagin (ou condições necessárias <strong>de</strong> otimalida<strong>de</strong> parasystemas dinâmicos) é dado por:x H f H uHx u xTufTxf Tu Txg 0g 0 2 u HT a 0 {u | ug u = 0}juntamente com as condições iniciais, finais e <strong>de</strong> complementarida<strong>de</strong>:x(0) = x oh[x(t f ),t f ] = 0 )[ x t (t f )] T x(t f ) = 0( f{H[x(t f ),u(t f ),(t f ),t f ] + i g i = 0, i = 1,2,...,p. ft } t f = 0<strong>10</strong>.3.3 Controle ótimoAnalisando inicialmente o problema <strong>de</strong> controle ótimo para sistemas lineares:x (t) = A(t) x(t) + B(t) u(t) , x(0) = x o36
com a seguinte função objetivo quadrática:on<strong>de</strong>x2Rt f1 2 122S[x(t),u(t),t f ] = x(tf) x(t) u(t)2R20= x T R x e R 0, Q(t) 0 e W(t) 0 são matrizes simétricas <strong>de</strong> pesos. Definindo oHamiltoniano para este problema:H[x(t),u(t),(t),t] =12Q(t)W ( t)dt2 1 2x(t) u(t)+ T [A x + B u]Q( t)W ( t)2então, pelo princípio do mínimo <strong>de</strong> Pontryagin, tem-se:x H A x + B u H Q x A T que resolvendo para u(t), chega-se a:x uH W u + B T = 0x(0) = x o(t f ) = R x(t f )u = W 1 B T x = A x B W 1 B T gerando um problema <strong>de</strong> TPBVP (two-point boundary value problem) para x e , cujasolução minimiza a função objetivo, pois 2 u H = W > 0, e é um mínimo global <strong>de</strong>vido aconvexida<strong>de</strong> do problema. Se a solução (t) do problema <strong>de</strong> TPBVP pu<strong>de</strong>r ser expressa comouma função da solução x(t) em termos <strong>de</strong> uma transformação linear P(t) nn , isto é, x(t) seruma base <strong>de</strong> soluções para (t):(t) = P(t) x(t)então a solução do TPBVP po<strong>de</strong> ser facilmente obtida. Para verificar tal possibilida<strong>de</strong>,primeiro substitui-se esta <strong>de</strong>pendência nas equações para x e , e subtrai-se uma da outraresultando em:( P +PA + A T P P B W 1 B T P + Q) x(t) = 0que <strong>de</strong>ve ser satisfeita t, logo como x(t) 0 então:P = PA A T P + P B W 1 B T P Qque é uma equação diferencial matricial não linear, conhecida como equação <strong>de</strong> Riccatidinâmica, cuja condição <strong>de</strong> contorno é obtida <strong>de</strong> (t f ) = R x(t f ), ou seja:P(t f ) = RFazendo a mudança <strong>de</strong> variável = t f t, tem-se d = dt e:37
P = PA + A T P P B W 1 B T P + QP(0) = RPortanto, o problema <strong>de</strong> TPBVP foi transformado em um problema <strong>de</strong> valor inicial <strong>de</strong>dimensão n (n + 1) / 2, pois P(t) é uma matriz simétrica. Com a solução da equação <strong>de</strong> Riccatidinâmica, a lei <strong>de</strong> controle ótimo quadrático é dada por:u* = K(t) x*(t)K(t) = W(t) 1 B(t) T P(t)que é in<strong>de</strong>pen<strong>de</strong>nte da condição inicial x o . O sistema dinâmico em malha fechada po<strong>de</strong> serescrito como:x * = (A B W 1 B T P) x* = A K x* , x(0) = x oon<strong>de</strong> A K (t) = A B W 1 B T P é a matriz característica da dinâmica do sistema regulado.Observa-se também que o valor ótimo da função objetivo é dado por:S[x*,u*,t f ] =12Tox P(0)xon<strong>de</strong> P(0) é obtido em t = 0 ( = t f ). Este resultado po<strong>de</strong> ser verificado pela equação:ddt( xTP x) xque ao substituir as expressões para P eddtTTP x xToPx xx *, resulta em:TP x( x P x) = x T Q x x T P B W 1 B T P x = x T Q x u T W uIntegrando a equação acima em [0, t f ] tem-se:pois P(t f ) = R.t fx(0) T P(0) x(0) = x(t f ) T P(t f ) x(t f ) + ( x Q x u W u)dt = S[x(t),u(t),t f ]Fazendo a integração em [t, t f ] tem-se:0x(t) T P(t) x(t) = x(t f ) T R x(t f ) + ( x Q x u W u)dt 0<strong>de</strong> on<strong>de</strong> conclui-se que P(t) é positiva semi<strong>de</strong>finida.Tt ftPara o caso particular <strong>de</strong> um sistema invariante no tempo, com [A B] controlável, t f = e matrizes pesos constantes, a lei <strong>de</strong> controle ótimo po<strong>de</strong> ser obtida através da solução daequação <strong>de</strong> Ricatti estacionária:PA + A T P P B W 1 B T P + Q = 0TTT38
que po<strong>de</strong> ser eficientemente resolvida via <strong>de</strong>composição em valores característicos dogradiente do Hamiltoniano associado. Neste caso a matriz <strong>de</strong> ganhos, K, da lei <strong>de</strong> controle éinvariante no tempo.Na maioria dos casos <strong>de</strong> controle ótimo não linear, é mais eficiente tratar o problemacomo uma programação não linear do que utilizar o princípio do mínimo <strong>de</strong> Pontryagin, paraobter o controle ótimo, u(t). Nestes casos, a escolha da forma das variáveis <strong>de</strong> controle tomaum aspecto mais <strong>de</strong> engenharia do que matemático, pois <strong>de</strong>pen<strong>de</strong>rá da forma com que asações <strong>de</strong> controle serão implementadas na prática. Alguns tipos <strong>de</strong> variações mais comunspara as variáveis <strong>de</strong> controle estão ilustrados abaixo.Sendo as duas primeiras mais freqüentemente utilizadas em controle ótimo <strong>de</strong> processos.Para qualquer um dos casos acima, o algoritmo abaixo mostra uma maneira <strong>de</strong>solucionar o problema <strong>de</strong> otimização dinâmica via NLP, conhecida como método datentativa-e-erro ou single-shooting.algoritmo1) Escolher um perfil inicial para as variáveis <strong>de</strong> controle, u 0 (t), k = 0.2) Integrar o sistema <strong>de</strong> equações algébrico diferenciais.3) Calcular a função objetivo e restrições.4) Corrigir as variáveis <strong>de</strong> controle pelo uso <strong>de</strong> métodos <strong>de</strong> NLP.5) Verificar a convergência <strong>de</strong> u k (t). Caso não esteja satisfeita k k + 1 (ir para 2).6) FIM.39
Outra forma <strong>de</strong> resolver o problema é através da discretização das equaçõesdiferenciais (ou método <strong>de</strong> multiple-shooting) por técnicas <strong>de</strong> elementos finitos, diferençasfinitas ou aproximação polinomial, gerando um problema algébrico <strong>de</strong> programação nãolinear <strong>de</strong> elevada dimensão, que também po<strong>de</strong> ser resolvido por qualquer método <strong>de</strong> NLP comrestrição.Lista <strong>de</strong> Exercícios1) A figura abaixo representa um extrator on<strong>de</strong> entram uma solução com uma vazão F = <strong>10</strong> 4kg H 2 O / h e uma concentração x o = 0,02 kg A / kg H 2 O, e um solvente B puro a uma vazãoW kg B / h a ser <strong>de</strong>terminada. A corrente rafinada sai com uma vazão F = <strong>10</strong> 4 kg H 2 O / h euma concentração x kg A / kg H 2 O e ainda um pouco <strong>de</strong> solvente B dissolvido em água. Noextrato, a vazão é <strong>de</strong> W kg B / h e a concentração y kg A / kg B. Calcular a vazão ótima W <strong>de</strong>B.dados: preço do soluto no extrato: 0,4 $ / kg Apreço do solvente B: 0,01 $ / kg Bsolubilida<strong>de</strong> <strong>de</strong> B em água: 0,0007 kg B / kg H 2 Orelação <strong>de</strong> equilíbrio: y = k x (k = 4)o <strong>de</strong>spejo não tem valor comercial.critério <strong>de</strong> <strong>de</strong>sempenho: Lucro = $ soluto extraído - $ solvente utilizado.2) Calcular as vazões ótimas <strong>de</strong> solvente para o exercício anterior quando dois extratores emsérie são utilizados no lugar <strong>de</strong> apenas um extrator, conforme figura abaixo. Consi<strong>de</strong>re amesma relação <strong>de</strong> equilíbrio e a mesma solubilida<strong>de</strong> <strong>de</strong> B em água para os dois extratores.40
3) A figura abaixo representa um trocador <strong>de</strong> calor em contra-corrente, on<strong>de</strong> uma corrente <strong>de</strong>processo com vazão W 1 = <strong>10</strong>00 kg / h e temperatura T 1 = 200 °C é resfriada a T 2 = <strong>10</strong>0 °Cpor uma corrente fria a t 2 = 60 °C. Calcular a vazão ótima W 2 do refrigerante (kg / h) bemcomo a área <strong>de</strong> troca térmica ótima A (m 2 ). Consi<strong>de</strong>rar cp = 1 kcal / kg °C para as duascorrentes e U = 500 kcal / h m 2 °C.dados: investimento do trocador <strong>de</strong> calor: 3200 (A / 50) 0,48 $custo do refrigerante: 5 x <strong>10</strong> -6 $ / kgcusto <strong>de</strong> manutenção: 2 % do investimento / anotempo <strong>de</strong> operação: 8640 h / anocritério <strong>de</strong> <strong>de</strong>sempenho: custo anual = 50 % custooperacional + <strong>10</strong> % ao ano sobre o investimento4) A figura abaixo representa um sistema <strong>de</strong> dois trocadores <strong>de</strong> calor em série, on<strong>de</strong> umacorrente <strong>de</strong> processo com vazão F o = <strong>10</strong>00 kg / h e temperatura t o = 20 °C <strong>de</strong>ve seraquecida a t 2 = <strong>10</strong>0 °C por correntes <strong>de</strong> vapor saturado a T 1 = <strong>10</strong>0 °C e T 2 = 120 °C,respectivamente. Calcular as vazões ótimas W 1 e W 2 das correntes <strong>de</strong> vapor (kg / h) bemcomo as áreas <strong>de</strong> troca térmica ótimas A 1 e A 2 (m 2 ). Consi<strong>de</strong>rar cp = 1 kcal / kg °C, U 1 =300 kcal / h m 2 °C, U 2 = 400 kcal / h m 2 °C, 1 = 500 kcal / kg e 2 = 600 kcal / kg.F o , t oA 1 , U 1t 1t 2A 2 , U 2W 1 , T 1W 2 , T 2dados: investimento dos trocadores <strong>de</strong> calor: 160 (A 1 ) 0,5 $ e 320 (A 2 ) 0,5 $custo do vapor: (a <strong>10</strong>0 °C) 5 x <strong>10</strong> -6 $ / kg e (a 120 °C) 1 x <strong>10</strong> -5 $ / kgcusto <strong>de</strong> manutenção: 2 % do investimento / anotempo <strong>de</strong> operação: 8640 h / anocritério <strong>de</strong> <strong>de</strong>sempenho:custo anual = 50 % custo operacional + <strong>10</strong> % ao ano sobre o investimento41
5) Um reator CSTR converte um reagente A em um produto B através <strong>de</strong> uma reaçãocatalítica endotérmica. O catalisador po<strong>de</strong> ser continuamente injetado no reator e atemperatura do reator po<strong>de</strong> ser controlada pela injeção <strong>de</strong> vapor através <strong>de</strong> uma serpentina.Alguma conversão po<strong>de</strong> ser obtida somente com o aquecimento, sem a adição <strong>de</strong> catalisador.Por outro lado, po<strong>de</strong>-se também obter alguma conversão somente com a adição <strong>de</strong> catalisador,sem o aquecimento. O produto B po<strong>de</strong> ser vendido por R$ 50 / mol <strong>de</strong> B. O custo docatalisador (R$ / mol da alimentação) é dado pela expressão:Cc 2<strong>10</strong> X 20c2X con<strong>de</strong> X c é a fração molar <strong>de</strong> catalisador. O custo do vapor (R$ / mol da alimentação) é dadopela expressão:Cs <strong>10</strong>,003 S 2 <strong>10</strong> 6 S2on<strong>de</strong> S é a relação <strong>de</strong> kg <strong>de</strong> vapor / mol <strong>de</strong> alimentação. A conversão em termos dasquantida<strong>de</strong>s <strong>de</strong> catalisador e vapor é dada por:X 0, <strong>10</strong>,3 X <strong>10</strong> S <strong>10</strong>Bc 4 4X S con<strong>de</strong> X B é a relação <strong>de</strong> mol <strong>de</strong> B / mol <strong>de</strong> alimentação. Deseja-se saber qual o lucro máximo<strong>de</strong>ste processo produtivo por mol <strong>de</strong> alimentação.6) Encontre o mínimo global da função2122f ( x) x x 3x 15x1 2sujeito a: ( x x ) 4( x x ) 01 221 242
Bibliografia Básica• The Variational Method in Engineering – R. S. Schechter – McGraw-Hill, 1967.• Optimization: Theory and Practice – G. S. G. Beveridge & R. S. Schechter – McGraw-Hill, 1970.• Applied Nonlinear Programming – D. M. Himmelblau – McGraw-Hill, 1972.• Nonlinear Programming – M. S. Bazaraa & C. M. Shetty – John Wiley & Sons, 1979.• Mathematical Programming. Theory and Algorithms – M. Minoux – John Wiley & Sons,1986.• <strong>Programa</strong>ção Não-Linear. Introdução à Teoria e aos Métodos – P. Mahey – EditoraCampus, 1987.• Optimization of Chemical Processes – T. F. Edgar & D. M. Himmelblau – McGraw-Hill,1988.• Nonlinear and Mixed-Integer Optimization: Fundamentals and Applications – C.A.Floudas – Oxford Press, 1995.• Optimierung – M. Papageorgiou – Ol<strong>de</strong>nbourg Ed., 1996.• Systematic Methods of Chemical Process Design – L.T. Biegler, I.E. Grossmann, A.W.Westerberg – Prentice Hall, Inc., 1997.• Numerical Optimization – J. Nocedal & S. J. Wright – Springer, 1999.• Numerical Optimization – J. F. Bonnans, J. C. Gilbert, C. Lemaréchal & C. A.Sagastizábal – Springer, 2003.43