You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
пр . Если восстанавливающий момент М в<br />
левого колеса даже бла<strong>года</strong>ря увеличению<br />
л внутреннего левого ведущего колеса<br />
не уменьшается, сила сцепления его<br />
шины с дорогой достигает нижней пороговой<br />
величины. В этом случае корректировка<br />
угла поворота для уравнивания<br />
восстанавливающих моментов М в левого<br />
и правого колес не требуется. Способ регулирования<br />
в данном случае тот же, что<br />
в обоих предыдущих случаях. Алгоритм<br />
функционирования системы и способа<br />
управления предполагает проведение<br />
оценки транспортной ситуации, прямолинейности<br />
движения, начала поворота,<br />
увеличения угла поворота внутреннего<br />
колеса или его равенства наружному,<br />
криволинейности движения, достаточности<br />
сцепления внутреннего поворачиваемого<br />
колеса, разности между левой и правой<br />
силами, ортогонально действующими<br />
на кузов автомобиля, действия процесса<br />
торможения и управления углом поворота<br />
внутреннего колеса таким образом,<br />
чтобы свести к нулю разность между силами<br />
на левом и правом колесах, аналогичное<br />
управлению с целью оптимизации<br />
этих сил.<br />
Убедившись в том, что действующие на<br />
колеса автомобиля силы нельзя рассматривать<br />
безотносительно фактических<br />
углов установки, поворота и их изменения<br />
в динамике, воспользуемся такой,<br />
практически, неиспользовавшейся ранее<br />
комплексной кинематической характеристикой<br />
подвески, как динамическое<br />
изменение угла между осью поворота и<br />
средней плоскостью колеса, в статике<br />
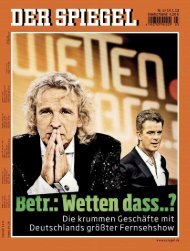
равного δ 0 +γ 0 (рис. 3а), которое в динамике<br />
можно представить как Δ(δ+γ) (рис. 3в)<br />
Рис. 3<br />
БЕЗОПАСНОСТЬ: ЧЕЛОВЕК, АВТОМОБИЛЬ, ДОРОГА<br />
(«+» – при положительном развале колеса,<br />
«–» – при отрицательном) по характеристике<br />
«ход – поперечный наклон оси<br />
поворота колеса». Это изменение определяет<br />
угол наклона верхнего и нижнего<br />
β поперечных рычагов с расстоянием<br />
С между шарнирами их крепления на<br />
опоре подшипника колеса (поворотном<br />
кулаке), от нижнего до дорожной поверхности<br />
d, плечо обкатки R o (рис. 3а) или<br />
r s (рис. 3в), величины плеча силы тяги L‘ A1<br />
(рис. 3а) и равного ему плеча силы сопротивления<br />
качению r a (рис. 3б), плеча<br />
тормозной силы r b (рис. 3в), а также<br />
точек их приложения на дороге L A1 (рис.<br />
3а), F (рис. 3б), F (рис. 3в), в центре ко-<br />
R b<br />
леса L‘ (рис. 3а), F A1 ’ (рис. 3б) и на оси<br />
R<br />
поворота L‘‘ A1 (рис. 3а), F‘‘ R (рис. 3б) и G<br />
(рис. 3в). При нахождении точки пересечения<br />
дорожного полотна линией продолжения<br />
оси поворота колеса изнутри<br />
от точки приложения нормальной реакции<br />
дороги плечо обкатки будет положительным,<br />
снаружи – отрицательным.<br />
В связи с этим весьма интересным является<br />
более углубленное рассмотрение<br />
кинематики подвески и сил, действующих<br />
на колеса автомобиля, как установлено<br />
ранее. Изменение поперечного наклона<br />
оси поворота колеса относительно<br />
его средней плоскости (δ o +γ o ) (рис. 3а)или<br />
угла между ними Δ(δ+γ) (рис. 3в) определяет<br />
точки приложения и плечи силы<br />
тяги (рис. 3в), нормальной реакции от дороги<br />
и сопротивления качению (рис. 3б),<br />
торможения (рис. 3в) и плечо обкатки R o<br />
(рис. 3а), r s (рис. 3в). Оптимизация характеристики<br />
подвески заднего колеса с<br />
традиционным приводом обеспечивается<br />
как можно большим отрицательным сме-<br />
) ) )<br />
АВТОТРАНСПОРТ: ЭКСПЛУАТАЦИЯ, ОБСЛУЖИВАНИЕ, РЕМОНТ 04 • <strong>2011</strong><br />
59